

3.4. Многокаскадные радиопередающие устройства рлс
Радиопередающие устройства современных РЛС строятся, как правило, по многокаскадной схеме, состоящей из возбудителя (или задающего генератора) и каскадов усиления мощности. Многокаскадные РПУ по сравнению с однокаскадными обладают широкими возможностями управления частотой или фазой колебания, позволяет получать более высокую стабильность несущей частоты и законов модуляции сложных сигналов, а также обеспечивать значительную выходную мощность.
В многокаскадных передающих устройствах в отличие от однокаскадных оказывается возможным распределение между каскадами функций стабилизации частоты, внутри импульсной модуляции и усиления мощности. Разработка многокаскадных РПУ оказалась возможной благодаря созданию мощных усилительных приборов: пролетных клистронов, ЛБВ, амплитронов и др.
3.4.1. Многокаскадное радиопередающее устройство с «простым» зондирующим сигналом
Радиопередающее устройство предназначено для формирования в каждом зондировании четырех «гладких» радиоимпульсов на различных частотах, следующих друг за другом без временного интервала (рис.3.44) и четырех непрерывных гетеродинных напряжений.

Рис.3.44. Структура зондирующих сигналов
Передающее
устройство выполнено по схеме «маломощный,
высокостабильный возбудитель – усилитель
мощности», что обеспечивает когерентность
пачки зондирующих сигналов и высокую
стабильность несущей частоты. Относительная
нестабильность частоты передающего
устройства не превышает
![]() .
Структурная схема передающего устройства
представлена на рис.3.45.
.
Структурная схема передающего устройства
представлена на рис.3.45.

Рис.3.45. Структурная схема передающего устройства РЛС 19Ж6
Возбудитель состоит из четырех идентичных по принципу построения частотных каналов и сумматора. В каждом частотном канале формируется один радиоимпульс и одно непрерывное гетеродинное напряжение на соответствующих только этому каналу частотах. Гетеродинное напряжение используется в соответствующем канале приемного устройства для преобразования эхо-сигналов на промежуточную частоту.
Радиоимпульсы
на несущих частотах
![]() ,
,![]() ,
,![]() ,
,![]() формируются в каждом канале в результате
смешивания в смесителях СМ колебаний
высокостабильных Карцевых генераторов
на частотах
формируются в каждом канале в результате
смешивания в смесителях СМ колебаний
высокостабильных Карцевых генераторов
на частотах
![]() и когерентных последовательностей
радиоимпульсов на промежуточной частоте
и когерентных последовательностей
радиоимпульсов на промежуточной частоте
![]() .
Непрерывное напряжение на промежуточной
частоте вырабатывается генератором,
расположенным в приемной системе.
.
Непрерывное напряжение на промежуточной
частоте вырабатывается генератором,
расположенным в приемной системе.
Когерентность импульсов промежуточной частоты обеспечивается следующим образом. Непрерывное напряжение промежуточной частоты от генератора промежуточной частоты поступает в систему синхронизации, где преобразуется в последовательность тактовых видеоимпульсов (ТИ), из которых в каждом периоде повторения формируются четыре строб-импульса (рис.3.46, 3.47).
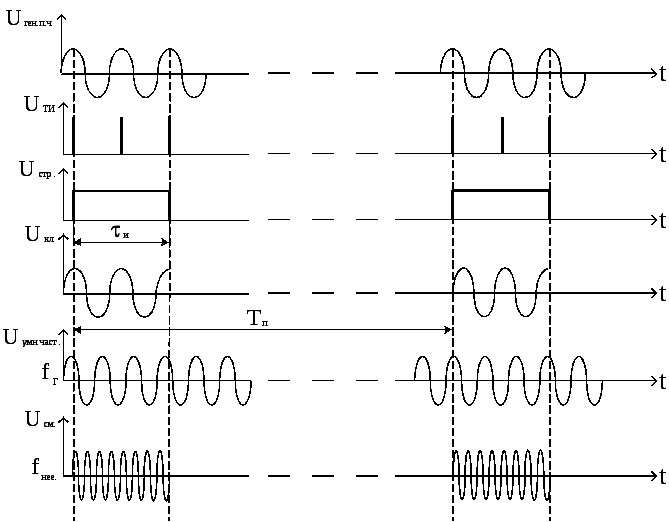
Рис.3.46. Графики напряжений на выходе генератора промежуточной частоты системы синхронизации и элементов возбудителя
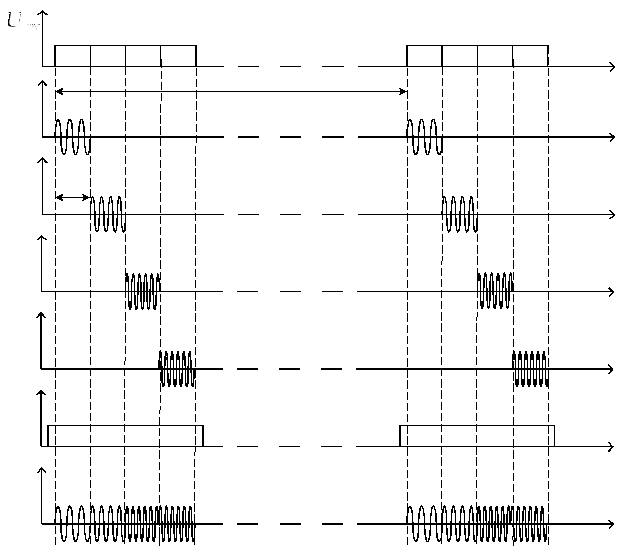
Рис.3.47. Графики напряжений на выходе возбудителя
Строб-импульсы,
длительностью
![]() каждый, следуют друг за другом без
временной паузы. Фронт каждого
строб-импульса жестко связан с фазой
напряжения промежуточной частоты (см.
рис.3.46.). Ключевые схемы открываются на
время, соответствующее длительности
строб импульсов, и когерентные «вырезки»
напряжения промежуточной частоты,
длительностью
каждый, следуют друг за другом без
временной паузы. Фронт каждого
строб-импульса жестко связан с фазой
напряжения промежуточной частоты (см.
рис.3.46.). Ключевые схемы открываются на
время, соответствующее длительности
строб импульсов, и когерентные «вырезки»
напряжения промежуточной частоты,
длительностью
![]() каждая поступают на смесители
соответствующих каналов возбудителя.
каждая поступают на смесители
соответствующих каналов возбудителя.
Таким
образом, использование одного и того
же высокостабильного по частоте
напряжения промежуточной частоты для
формирования стробирующих и зондирующих
импульсов обеспечивает получение
когерентной последовательности импульса
и высокую стабильность их периода
повторения
![]() .
.
Усилитель на выходе каждого канала возбудителя состоит их двух последовательно включенных двухкаскадных усилительных модулей на металлокерамических триодах. На аноды ламп модулей с модулятора возбудителя подается модулирующий импульс амплитудой +3 кВ, длительность которого превышает суммарную длительность четырех усиливаемых радиоимпульсов (см. рис.3.47).
Выходной усилитель мощности служит для усиления до необходимого уровня высокочастотных импульсных сигналов, поступающих с возбудителя. В качестве мощного усилительного прибора в передающем устройстве используется 9-резонаторный клистрон КИУ-77. Мощность высокочастотных импульсов на входе клистрона устанавливается для каждого образца прибора в пределах 5…60 Вт, что обеспечивается регулировкой аттенюаторов в каналах возбудителя (на рис.3.45 аттенюаторы не показаны).
Модулятор клистрона под воздействием импульсов запуска формирует модулирующие видеоимпульсы амплитудой -55 кВ. Модулятор собран по схеме с полным разрядом накопительной линии через нагрузку. В качестве ключей используются тиристорные столбы из 17 последовательно включенных тиристоров для согласования их рабочего напряжения с амплитудой напряжения коммутируемых видеоимпульсов. Для получения необходимой мощности формируемых модулирующих видеоимпульсов параллельно включены четыре блока накопительных линий. Длительность модулирующего импульса, подаваемого на клистрон, превышает суммарную длительность усиливаемых радиоимпульсов. Нагрузкой модулятора являются первичные обмотки двух импульсных трансформаторов – импульсного трансформатора клистрона и импульсного трансформатора в модуляторе возбудителя.
С целью ослабления эффекта «слепых» скоростей цели в РЛС применена вобуляция частоты посылок зондирующих импульсов. Вобуляция производится скачкообразно через 8 периодов посылок. Полный цикл вобуляции составляет 32 периода посылок (4 скачка). Вобуляция частоты посылок является так же одним из способов защиты РЛС от противорадиолокационных ракет.