

2.3.1. Зона обнаружения целей дальномерами
Форма
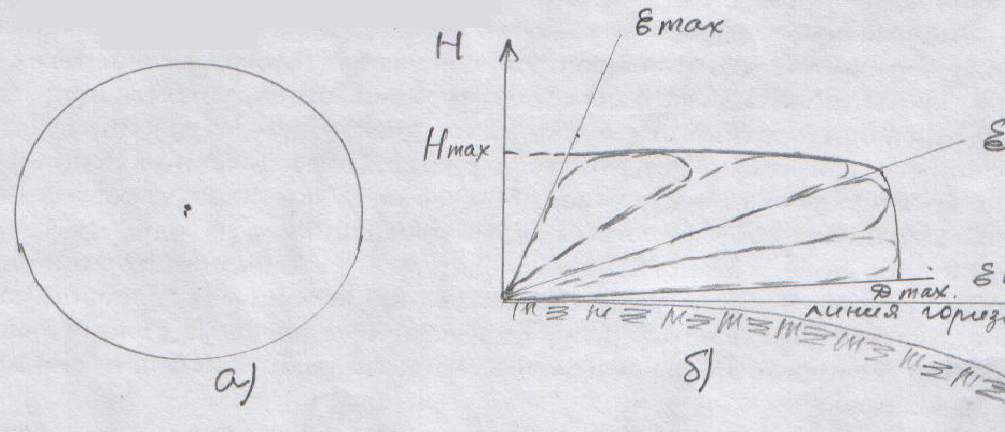
зоны обнаружения дальномеров в
горизонтальной плоскости должна быть
круговой (рис. 2.7, а), а в вертикальной
плоскости – такой, чтобы для нижних
углов места
![]() обеспечивалась заданная дальность
обнаружения, а для углов места
обеспечивалась заданная дальность
обнаружения, а для углов места
![]() - заданная высота (рис. 2.7, б).
- заданная высота (рис. 2.7, б).

а) б)
Рис. 2.7 Сечение зоны обнаружения дальномеров: а) горизонтальной плоскостью; б) полусечение – вертикальной плоскостью.
Значение
![]() определяется требуемыми величинами
определяется требуемыми величинами
![]() и
и
![]() обнаружения целей:
обнаружения целей:
![]()
Аналитически зона обнаружения (зависимость дальности обнаружения от угла места цели) описывается известным выражением:
![]()
 , для
, для
![]()
![]() =
= ![]() , для
, для
![]()
0, для
![]() и
и
![]()
и называется косекансной. Формирование обнаружения заданного вида достигается выбором формы ДНА дальномеров, вида и параметров обзора пространства. В дальномерах выбирают…
СТР 20
---------------------------------------------------------------------------------------------------------------------
ДНА
узкой в азимутальной плоскости и широкой
– в угломестной. При этом обеспечивается
одновременный обзор всех углов места
в пределах от
![]() до
до
![]() и последовательный (за счет вращения
антенны) обзор по азимуту. Такой вид
обзора в литературе называют одномерным.
и последовательный (за счет вращения
антенны) обзор по азимуту. Такой вид
обзора в литературе называют одномерным.
Косекансная форма зоны обнаружения в вертикальной плоскости получается при одноканальном либо многоканальном построении приемопередающего и антенно-волноводного трактов дальномера.
При одноканальном построении треков зона обнаружения в вертикальной плоскости создается с помощью одного широкого луча антенны, перекрывающего заданные углы места. Требуемая форма луча ДНА обеспечивается с помощью зеркала с переменной кривизной в вертикальной плоскости.
В
случае многоканального построения
дальномеров требуемая форма зоны
обнаружения создается с помощью
нескольких смещенных друг относительно
друга по углу места сравнительно узких
лучей ДН ( см. рис. 2.7, б пунктирной линией)
причем лучи верхних углов места (![]() )
обеспечивают косекансную форму зоны
обнаружения. С каждым лучом ДНА связан
свой передатчик и приемник. Выходы всех
приемников, как правило, объединяются
на общий индикатор или общее устройство
автосъема информации.
)
обеспечивают косекансную форму зоны
обнаружения. С каждым лучом ДНА связан
свой передатчик и приемник. Выходы всех
приемников, как правило, объединяются
на общий индикатор или общее устройство
автосъема информации.
Многоканальное построение дальномеров является более сложным, но имеет ряд достоинств по сравнению с одноканальным:
повышается помехозащищенность дальномеров от активных помех, так как
рабочие частоты каналов могут существенно отличаться друг от друга;
каждый луч может формироваться с помощью отдельной антенны, поэтому
появляется возможность уравнения формой зоны обнаружения в вертикальной плоскости в соответствии с воздушной и помеховой обстановкой, например:
совмещение в пространстве нескольких лучей с целью увеличения дальности или
высоты обнаружения целей под определенными углами места за счет уменьшения влияния флюктуаций ЭПР целей, а также повышения помехозащищенности
СТР 21
---------------------------------------------------------------------------------------------------------------------
дальномеров от активных и пассивных помех;
выключение или загрубление усиления отдельных приемных каналов, перегруженных помехами, с целью обнаружения и проводки целей другими каналами;
выключение отдельных передающих каналов при обнаружении пуска противорадиолокационных ракет с целью снижения вероятности наведения на дальномер;
повышение надежности дальномера, так как отказ одного из каналов при наличии возможности управления зоной обнаружения не означает выход из строя всего дальномера;
при многоканальном построении дальномера используются большие площади антенн (коэффициенты усиления антенн в каждом угломестном направлении) благодаря чему достигается существенный выигрыш в необходимой энергии (мощности) передающего устройства. Действительно, из уравнения радиолокации

где
![]() - значение ДНА в направлении с координатами
- значение ДНА в направлении с координатами
![]() ;
;
![]() - число импульсов в пачке.
- число импульсов в пачке.
следует,
что коэффициент усиления антенны
![]() в большей мере влияет на дальность
обнаружения, чем другие энергетические
параметры РЛС. Так, при сужении ДНА в
в большей мере влияет на дальность
обнаружения, чем другие энергетические
параметры РЛС. Так, при сужении ДНА в
![]() раз (путем соответствующего увеличения
размеров антенны) во столько же раз
возрастает коэффициент усиления антенны
раз (путем соответствующего увеличения
размеров антенны) во столько же раз
возрастает коэффициент усиления антенны
![]() .
При этом мощность каждого канала
передатчика можно уменьшить в
.
При этом мощность каждого канала
передатчика можно уменьшить в
![]() раз, а число каналов также должно быть
раз, а число каналов также должно быть
![]() .
Тем не менее, в результате будет иметь
место выигрыш в суммарной мощности
передающих устройств в
.
Тем не менее, в результате будет иметь
место выигрыш в суммарной мощности
передающих устройств в
![]() раз.
раз.
Увеличение
размеров антенны и числа каналов приводит
к возрастанию объема аппаратуры
дальномеров. Поэтому узкими делают лучи
ДНА, перекрывающие нижние углы места
(![]() ),
где цели должны обнаруживаться на
максимальной дальности (см. рис. 2.7.б).
Лучи ДНА верхних углов места (
),
где цели должны обнаруживаться на
максимальной дальности (см. рис. 2.7.б).
Лучи ДНА верхних углов места (![]() )
делают широкими, так как дальность
обнаружения целей в зоне этих углов
должна быть существенно меньше. В
горизонтальной плоскости ширину
)
делают широкими, так как дальность
обнаружения целей в зоне этих углов
должна быть существенно меньше. В
горизонтальной плоскости ширину
СТР 22
---------------------------------------------------------------------------------------------------------------------
лучей ДНА выбирают одинаковой.
Антенные устройства дальномеров боевого режима устанавливаются ,как правило, на кабине (прицепе) с приемно-передающей аппаратурой (ППК). При этом обеспечивается сравнительная простота канализации энергии зондирующего сигнала к антенне (без вращающихся сочленений волноводов), сокращение длины волноводных трактов и, следовательно, уменьшение потерь энергии в них. Большой вес ППК и размеров антенны требует применения приводов вращения ППК большой мощности. Потребляемая энергия на вращение может составлять до 30…40% от электроэнергии, потребляемой всей РЛС.