

3.2.2.2. Ошибки измерения угловых координат
Потенциальная ошибка измерения угловой координаты определяется формой и шириной диаграммы направленности антенны в соответствующей плоскости, отношением сигнал/шум на входе измерительного устройства и способом измерения координат. В общем случае
![]() ,
,
где
![]() - ширина ДН антенны в соответствующей
плоскости;
- ширина ДН антенны в соответствующей
плоскости;
![]() - коэффициент пропорциональности,
зависящий от формы ДН и способа измерения
угловой координаты
- коэффициент пропорциональности,
зависящий от формы ДН и способа измерения
угловой координаты
![]() .
.
Числовое
значение коэффициента
![]() составляет:
составляет:
![]() - при измерении углового положения цел
методом линейного сканирования луча
ДН (используется при измерении азимута
цели в обзорных РЛС и угла места в
радиовысотомерах);
- при измерении углового положения цел
методом линейного сканирования луча
ДН (используется при измерении азимута
цели в обзорных РЛС и угла места в
радиовысотомерах);
![]() - при измерении
- при измерении
![]() методом парциальных диаграмм (в
трехкоординатных РЛС).
методом парциальных диаграмм (в
трехкоординатных РЛС).
В
РЛС метрового диапазона на границе зоны
обнаружения потенциальная ошибка
измерения азимута из-за широкой ДН в
азимутальной плоскости может быть
значительной. Так при
![]() на границе зоны обнаружения
на границе зоны обнаружения
![]() .
.
Для
повышения точности измерения угловой
координаты (уменьшения
![]() )
необходимо также, как и в случае измерения
дальности, увеличивать отношение
сигнал/шум
)
необходимо также, как и в случае измерения
дальности, увеличивать отношение
сигнал/шум
![]() на выходе оптимального фильтра, и, кроме
того, сужать диаграмму направленности.
При фиксированных размерах антенны это
достигается уменьшением длинны волны
на выходе оптимального фильтра, и, кроме
того, сужать диаграмму направленности.
При фиксированных размерах антенны это
достигается уменьшением длинны волны![]() .
.
Остальные составляющие ошибки измерения угловой координаты цели (см. выражение (3.8)) прямо от параметров зондирующего сигнала не зависят.
3.2.3. Зависимость разрешающей способности рлс от параметров зондирующих сигналов
Разрешающая способность РЛС по координатам определяет полноту сведений о воздушной обстановке при наличии большого числа целей (точечных и распределенных) в зоне обзора РЛС и влияет на возможности РЛС по вскрытию группового состава целей, а так же на помехозащищенность РЛС от пассивных помех.
Под разрешающей способностью РЛС по какой либо координате понимают такое минимальное различие в данной координате у двух целей при совпадении у них других координат, при котором цели наблюдаются раздельно.
Данное определение в общем случае не является строгим, поскольку не оговариваются показатели качества разрешения. В реальных условиях, когда процессы радиолокационного обнаружения и разрешения сопровождаются мешающим шумом, необходимо говорить о статическом разрешении, т.е. о разрешении целей с заданной вероятностью или допустимым снижением качества обнаружения.
Различают потенциальную и реальную разрешающие способности.
Потенциальная разрешающая способность характеризует предельно достижимое разрешение и определяется соотношением сигнал/шум и протяженностью сечения тела неопределенности (двумерной автокорреляционной функции) зондирующего сигнала РЛС по параметру разрешения. Чем больше отношение сигнал/шум и меньше протяженность тела неопределенности по соответствующему параметру, тем при всех прочих равных условиях выше потенциальная разрешающая способность РЛС.
Реальная разрешающая способность всегда хуже потенциальной. К факторам, ухудшающим разрешающую способность, относятся:
неоптимальность структуры радиолокационных приемников с точки зрения решения задачи разрешения сигналов;
ограничение сигналов из-за недостаточного динамического диапазона приемного тракта;
ограниченная разрешающая способность устройств измерения координат.
Рассмотрим далее зависимость потенциальной разрешающей способности РЛС от параметров зондирующих сигналов с помощью анализа соответствующих двумерных автокорреляционных функций.
Известные схемы оптимальной (согласованной) обработки радиолокационных сигналов базируются на операции вычисления корреляционного интеграла (модульного значения)
![]() (3.9)
(3.9)
здесь ![]() - комплексная амплитуда зондирующего
сигнала;
- комплексная амплитуда зондирующего
сигнала;
![]() - комплексная амплитуда ожидаемого
сигнала с учетом запаздывания
- комплексная амплитуда ожидаемого
сигнала с учетом запаздывания
![]() и доплеровской добавки частоты
и доплеровской добавки частоты
![]() ,
знак минус в показателе степени экспоненты
учитывает, что при радиальной скорости
,
знак минус в показателе степени экспоненты
учитывает, что при радиальной скорости
![]() (удаляющаяся цель) частота отраженного
сигнала менее частоты зондирующего.
(удаляющаяся цель) частота отраженного
сигнала менее частоты зондирующего.
Величина
принимаемого сигнала
![]() является, в общем случае, суммой
комплексных амплитуд сигнала и помехи:
является, в общем случае, суммой
комплексных амплитуд сигнала и помехи:
![]() , (3.10)
, (3.10)
где
![]() и
и
![]() - истинные значения запаздывания и
доплеровской частоты полезного сигнала.
С учетом (3.10) модуль (3.9) сводится к модулю
суммы двух комплексных величин
- истинные значения запаздывания и
доплеровской частоты полезного сигнала.
С учетом (3.10) модуль (3.9) сводится к модулю
суммы двух комплексных величин
![]() (3.11)
(3.11)
Первая
величина
![]() при неслучайной амплитуде сигнала
является неслучайной и выражается
зависящим от сигнала интегралом:
при неслучайной амплитуде сигнала
является неслучайной и выражается
зависящим от сигнала интегралом:
![]() (3.12)
(3.12)
Вторая является случайной величиной, тем меньшей, чем слабее помеха, и выражается интегралом:
![]() (3.13)
(3.13)
Сигнальный
интеграл (3.12) и его модульное значение
представляют собой функции разностей
ожидаемого
![]() и истинного
и истинного
![]() времени запаздывания, ожидаемой
времени запаздывания, ожидаемой
![]() и истинной
и истинной
![]() доплеровских частот.
доплеровских частот.
![]() (3.14)
(3.14)
где
![]() ,
,
![]() .
.
Вычислим
функцию
![]() .
Для этого произведем замену переменной
.
Для этого произведем замену переменной
![]() в интеграле (3.12) и множитель
в интеграле (3.12) и множитель
![]() вынесем за знак интеграла. Заменяя
модуль произведения произведением
модулей, где
вынесем за знак интеграла. Заменяя
модуль произведения произведением
модулей, где
![]() ,
,
получим
![]() (3.15)
(3.15)
Функция
![]() называется двумерной автокорреляционной
функцией сигнала. Она зависит от своих
разностных аргументов
называется двумерной автокорреляционной
функцией сигнала. Она зависит от своих
разностных аргументов
![]() ,
,
![]() и не зависит от значений
и не зависит от значений
![]() и
и
![]() .
Кроме того, функция
.
Кроме того, функция
![]() зависит от вида комплексной огибающей
когерентного сигнала
зависит от вида комплексной огибающей
когерентного сигнала
![]() .
.
Как и диаграммы направленности антенн, автокорреляционные функции сигналов могут быть нормированы. Поскольку
![]() ,
,
где
![]() - энергия сигнала, то
- энергия сигнала, то
![]() (3.16)
(3.16)
Функцию
![]() называют нормированной двумерной
автокорреляционной функцией сигнала.
называют нормированной двумерной
автокорреляционной функцией сигнала.
Изображение двумерной автокорреляционной функцией сигнала для колокольного радиоимпульса с постоянной мгновенной частотой представлена на рис.3.24.
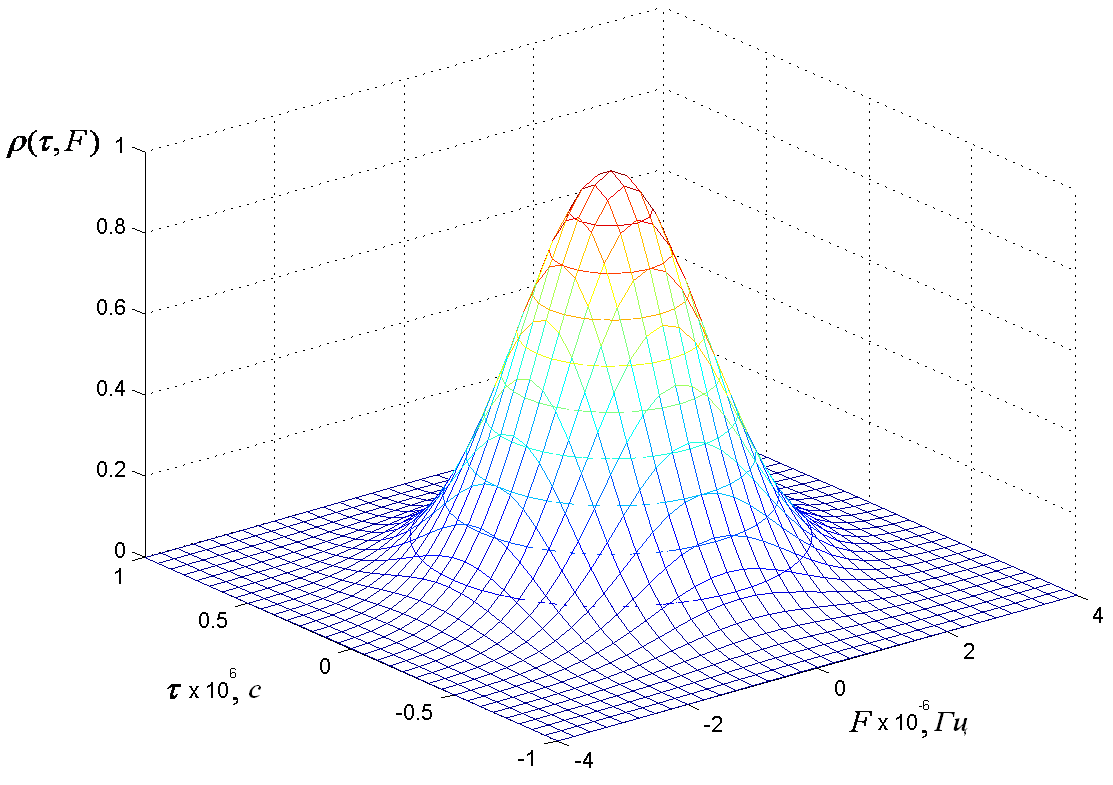
Рис.3.24. Изображение двумерной автокорреляционной функции сигнала
Рассмотрим свойства автокорреляционной функции сигнала:
свойство
центральной симметрии
![]() ;
;
значение
![]() находится в пределах
находится в пределах![]() ,
,
![]() ;
;
каждое
сечение
![]() плоскостью с фиксированными значениями
плоскостью с фиксированными значениями
![]() и
и
![]() можно рассматривать как выход
корреляционной схемы оптимальной
обработки или оптимального фильтра,
когда на них поступает сигнал без помехи,
параметры которого (время запаздывания
и частота) отличаются от ожидаемых на
можно рассматривать как выход
корреляционной схемы оптимальной
обработки или оптимального фильтра,
когда на них поступает сигнал без помехи,
параметры которого (время запаздывания
и частота) отличаются от ожидаемых на
![]() и
и
![]() соответственно.
соответственно.
По аналогии с (3.16) можно записать
![]() (3.17)
(3.17)
где
![]() - комплексный амплитудно-частотный
спектр сигнала.
- комплексный амплитудно-частотный
спектр сигнала.
Сечение
![]() вертикальной плоскостью
вертикальной плоскостью![]() ,
следует из (2.17), описывается выражением
,
следует из (2.17), описывается выражением
![]() (3.18)
(3.18)
и
является преобразованием Фурье от
квадрата амплитудно-частотного спектра
сигнала. При ограниченной ширине спектра
сигнала
![]() это сечение имеет вид импульса
длительностью
это сечение имеет вид импульса
длительностью
![]() (рис.3.25.), которую в литературе называют
мерой разрешающей способности по времени
запаздывания (по дальности).
(рис.3.25.), которую в литературе называют
мерой разрешающей способности по времени
запаздывания (по дальности).

Рис.3.25.
Сечение нормированной двумерной АКФ
плоскостью
![]()
Рассмотрим задачу разрешения сигналов по времени (по дальности), анализируя сигналы на выходе оптимального фильтра.
Пусть отраженный от сосредоточенных вторичных излучателей прямоугольные импульсы без внутриимпульсной модуляции обрабатываются оптимально и сдвинуты во времени на
![]() ,
,
где
![]() - расстояние между вторичными излучателями.
На рис.3.26. показаны огибающие выходных
импульсов оптимального фильтра.
- расстояние между вторичными излучателями.
На рис.3.26. показаны огибающие выходных
импульсов оптимального фильтра.
Величина
минимального интервала
![]() определяется возможностью раздельного
наблюдения смежных импульсов. В
рассматриваемом случае в качестве
условной меня разрешающей способности
по времени можно принять значение
определяется возможностью раздельного
наблюдения смежных импульсов. В
рассматриваемом случае в качестве
условной меня разрешающей способности
по времени можно принять значение
![]() ,
при котором максимуму огибающей сигнала,
отраженного от одной цели соответствует
нулевое значение огибающей импульса
от другой. Соответственно мерой
разрешающей способности по дальности
называют
,
при котором максимуму огибающей сигнала,
отраженного от одной цели соответствует
нулевое значение огибающей импульса
от другой. Соответственно мерой
разрешающей способности по дальности
называют
![]() .
.
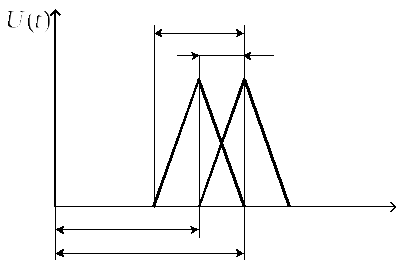
Рис.3.26. Огибающие отраженных радиоимпульсов от двух близких по дальности целей
Таким образом, потенциальная разрешающая способность РЛС по дальности определяется как
![]() (3.19)
(3.19)
и зависит от ширины спектра сигнала.
Потенциальная
разрешающая способность по угловым
координатам определяется шириной
диаграммы направленности антенны в
соответствующей плоскости по уровню
половинной мощности
![]() .
.
Для
увеличения потенциальной разрешающей
способности необходимо, как и при
измерении угловых координат, увеличивать
отношение сигнал/шум
![]() на входе измерительного устройства
(повышать энергию зондирующего сигнала
и, следовательно, отраженного сигнала),
а так же уменьшать угловые размеры
диаграммы направленности антенны.
Последнее, при неизменных размерах
антенны, достигается уменьшением длинны
волны
на входе измерительного устройства
(повышать энергию зондирующего сигнала
и, следовательно, отраженного сигнала),
а так же уменьшать угловые размеры
диаграммы направленности антенны.
Последнее, при неизменных размерах
антенны, достигается уменьшением длинны
волны
![]() (повышением несущей частоты) зондирующего
сигнала.
(повышением несущей частоты) зондирующего
сигнала.
Обобщенной мерой разрешающей способности импульсной РЛС по дальности и угловым координатам является импульсный объем, в пределах которого цели не разрешаются.
Обычно считают, что импульсный объем
ограничен шириной луча ДНА по половинной
мощности
![]() и длинной
и длинной
![]() (рис.3.27.), где
(рис.3.27.), где
![]() - длительность импульса на выходе схемы
оптимальной обработки.
- длительность импульса на выходе схемы
оптимальной обработки.
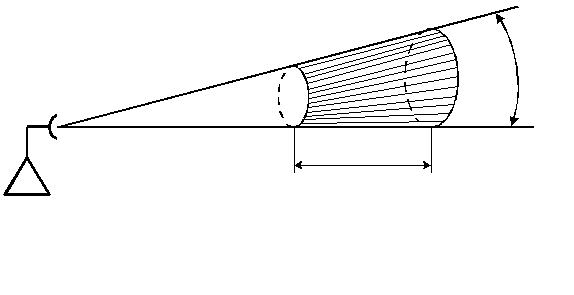
Рис.3.27. Импульсный объем РЛС
Чем
шире спектр зондирующего импульса
(меньше
![]() )
и уже луч ДНА (меньше
)
и уже луч ДНА (меньше
![]() ),
тем меньше импульсный объем и выше
разрешающая способность РЛС.
),
тем меньше импульсный объем и выше
разрешающая способность РЛС.
Разрешение
целей по скорости возможно при
использовании когерентной пачки
отраженных сигналов, так как она имеет
дискретный спектр (подробней эта задача
будет рассмотрена ниже). Разрешающая
способность по скорости – это разрешающая
способность по частоте![]() ,
где
,
где
![]() - число импульсов в пачке,
- число импульсов в пачке,
![]() - период следования импульсов.
- период следования импульсов.
Разрешающая
способность по скорости (по частоте)
тем выше, чем больше длительность пачки
импульсов
![]() .
.