

Тема 3. Передающие устройства рлс ртв
3.1. Технические характеристики и способы построения передающих устройств рлс ртв
Радиопередающие устройства РЛС РТВ предназначены для формирования СВЧ радиоимпульсов заданной формы, структуры и энергии.
Основными техническими характеристиками радиопередающих устройств являются:
мощность
(средняя
![]() либо импульсная
либо импульсная
![]() );
);
структура
сигнала СВЧ (длительность
![]() ,
закон внутриимпульсной модуляции,
ширина спектра
,
закон внутриимпульсной модуляции,
ширина спектра
![]() ,
частота (период) повторения
,
частота (период) повторения
![]() (
(![]() ));
));
стабильность несущей частоты, амплитуды и длительности, закона внутриимпульсной модуляции;
длина волны (несущая частота) генерируемых колебаний, диапазон перестройки по частоте;
эксплуатационная надежность, масса, габариты.
Радиопередающее устройство является основным элементом в системе формирования зондирующих сигналов (рис.3.1.).
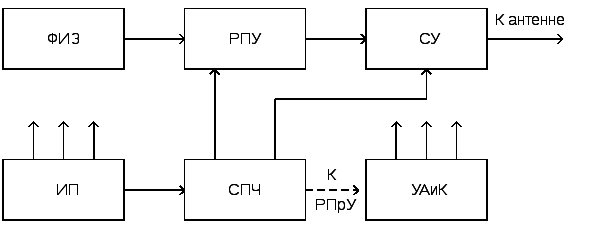
Рис.3.1. Структурная схема системы формирования зондирующих сигналов.
Формирователь импульсов запуска (ФИЗ) определяем моменты излучения и частоту повторения зондирующих сигналов РЛС. Система перестройки частоты (СПЧ) определяет значение несущей частоты зондирующих сигналов, а также параметры тракта СВЧ с помощью согласующего устройства (СУ) с целью передачи всей энергии зондирующих сигналов к антенне. Кроме того, СПЧ производит перестройку частоты местного гетеродина в радиоприемном устройстве (РПрУ) для обеспечения постоянного значения промежуточной частоты принимаемых сигналов. В систему формирования зондирующих сигналов входят различные источники питания (ИП), поскольку она является одной из основных потребителей энергии. Устройство автоматики и контроля (УАиК) предназначены для управления режимами работы РПУ и контроля за параметрами зондирующих сигналов.
В РЛС РТВ применяются два основных типа радиопередающих устройств:
«мощный автогенератор» и «задающий генератор-усилитель мощности».
Передающие устройства с мощным автогенератором СВЧ нашли широкое применение в основном в РЛС старого парка (П-37, 5Н84А, П-18, П-19, ПРВ-13, ПРВ-16, ПРВ-17, П-80 и других РЛС).
Радиопередающее устройство рассматриваемого типа включает подмодулятор, модулятор, автогенератор СВЧ и источник питания (рис.3.2.).
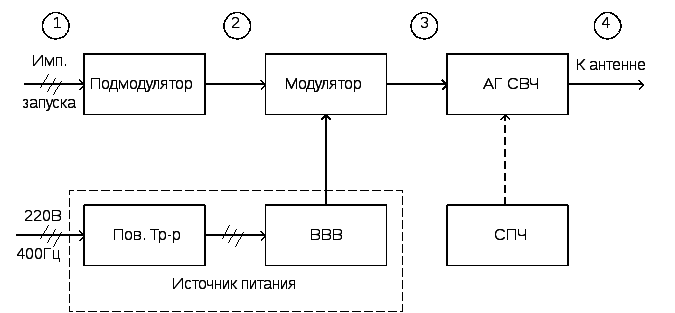
Рис.3.2. Упрощенная структурная схема РПУ с автогенератором СВЧ.
Подмодулятор усиливает импульс запуска по мощности до величины, достаточной для управления коммутирующим элементом модулятора. Модулятор формирует мощные импульсы выходного напряжения заданной формы, поступающие в цепь питания генераторного прибора СВЧ (см. рис.3.3.). Автогенератор СВЧ во время действия модулирующего импульса вырабатывает мощные автоколебания электромагнитной энергии СВЧ.

Рис.3.3. Структура сигналов на входе элементов РПУ с мощным автогенератором.
Выбор генераторного прибора и его конструкция определяются рабочей частотой, импульсной мощностью, полосой рабочих частот, системой охлаждения, стабильностью частоты и рядом других факторов. В станциях метрового и длинноволновой части дециметрового диапазонов автогенераторы, как правило, выполняются на мощных металлостеклянных или керамических триодах. Колебательные системы таких генераторов образуются отрезками коаксиальных линий и междуэлектродными ёмкостями генераторной лампы. В РСЛ сантиметрового и коротковолновой части дециметрового диапазонов волн функцию автогенератора СВЧ выполняет магнетрон или стабилитрон.
Источники питания вырабатывают необходимые напряжения для обеспечения электроэнергией элементов радиопередающего устройства. В большинстве РЛС состав источников питания входят повышающий трансформатор и высоковольтный выпрямитель, используемые для заряда электрической энергией накопителя модулятора.
При
использовании в качестве автогенератора
СВЧ магнетрона или стабилитрона
модулирующие импульсы формируют
отрицательной полярности (см. рис.3.3.
![]() ).
).
Радиопередающие устройства второго типа состоят их маломощного задающего генератора (возбудителя) и усилителя мощности или цепочки усилителей мощности (рис.3.4.) в зависимости от требуемой энергии зондирующих сигналов.
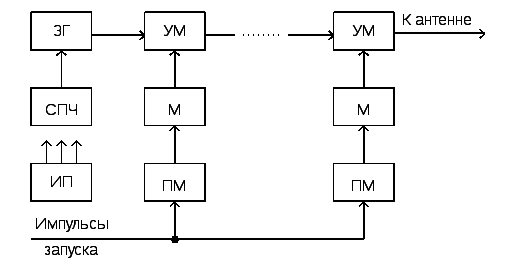
Рис.3.4. Структурная схема РПУ «ЗГ-УМ».
В РПУ типа задающий генератор – усилитель мощности стабильность частоты зондирующего сигнала определяется в основном маломощным задающим генератором, частота которого стабилизируется известными методами, например с помощью кварца. Возбудитель может быть выполнен по схеме, позволяющей осуществлять быстрое, в течение нескольких микросекунд, переключение с одной рабочей частоты на другую. Задающий генератор может так же формировать сложномодулированные сигналы ЛЧМ или ФКМ.
При
формировании сигнала возбудитель (как
правило, непрерывные маломощные
колебания) можно обеспечить его жесткую
связь с частотой гетеродинного сигнала
смесителя, что исключает необходимость
применения системы автоматической
подстройки частоты (АПЧ). Кроме того, в
таком передающем устройстве возможно
получение пачки когерентных импульсов,
что позволяет применять корреляционную
автокомпенсацию пассивных помех или
их доплеровскую фильтрацию (подробнее
будет рассмотрено в главе 6), а так же
объединять сигналы различных частот
на общий усилитель мощности либо
разделять их на отдельные выходы питания
различных элементов рупорного облучателя
или излучателей антенной решетки. Таким
образом, задающий генератор может
выполняться по схеме, обеспечивающей
одновременное формирование колебаний
с частотами
![]() (сигнала) и
(сигнала) и
![]() (местного гетеродина), а в ряде случаев
и с частотой
(местного гетеродина), а в ряде случаев
и с частотой
![]() (для обеспечения истинной внутренней
когерентности) (рис.3.5.).
(для обеспечения истинной внутренней
когерентности) (рис.3.5.).

Рис.3.5. Структурная схема задающего генератора.
Подмодулятор (ПМ) (рис.3.4.) так же как и в схеме (рис.3.2.) формирует импульсы запуска модулятора (М), а модулятор – мощные видеоимпульсы заданной амплитуды, полярности и длительности. Как правило, каждое усилительное звено должно иметь отдельные подмодулятор и модулятор. В последующем усилительном звене модулирующий импульс должен быть короче по длительности и больше по амплитуде (рис.3.6.). Это связано с необходимостью существенного ослабления или устранения влияния переходных процессов в усилительных звеньях на параметры зондирующего сигнала и обеспечения необходимой мощности на входе каждого усилительного звена.

Рис.3.6. Вид модулирующих импульсов в усилительных звеньях.
В оконечном каскаде должен использоваться усилительный прибор с максимально возможным коэффициентом полезного действия (КПД), поскольку КПД всей усилительной цепочки определяется в основном КПД оконечного каскада.
Основным требованием к усилительным приборам, используемым в первых звеньях усилительной цепочки, является обеспечение максимального коэффициента усиления. К КПД этих приборов предъявляются менее жесткие требования.
Рабочая ширина полосы пропускания каждого каскада усиления должна быть шире, чем ширина спектра сигнала с выхода, задающего генератора. В качестве усилительных элементов могут использоваться полупроводниковые, ламповые усилители, а так же амплитроны, клистроны пролетные и лампы бегущей волны (ЛБВ).
Полупроводниковые приборы работают на частотах до 10 ГГц и позволяют получить среднюю выходную мощность 10…100 Вт; амплитроны, клистроны и ЛБВ перекрывают диапазон частот от 1 до 100 ГГц при средней выходной мощности до 10 кВт.
Искажения сигнала, вносимые возбудителем или усилителем мощности, влияют на качество обработки эхо-сигналов при приеме. Искажения появляются в результате нелинейных явлений в процессе модуляции мощными видеоимпульсами, либо в тракте СВЧ. Отраженные в СВЧ тракте усиленные сигналы могут вновь отражаться от усилительных приборов, изменяя их режим работы. Поэтому в усилительной цепочке на входе каждого каскада усиления, как правило, устанавливаются вентили или согласующие устройства. Применение устройств согласования позволяет получить стабильность фазы усиливаемого сигнала в пределах нескольких градусов.
В РЛС с широкополосными зондирующими сигналами (ЛЧМ или ФКМ), а так же с многочастотными сигналами передающее устройство практически всегда выполняется по схеме задающий генератор – усилитель мощности. Это связано в одних случаях (например, в РЛС с ЛЧМ или ФКМ импульсами) с необходимостью обеспечения жестких требований к стабильности закона изменения частоты или фазы внутри импульса, а в других (в РЛС с многочастотной) – с упрощением технической реализацией передатчика.
Рассмотрим принцип построения радиопередающих устройств, предназначенных для формирования широкополосных сигналов.
Формирование ЛЧМ зондирующих импульсов возможно активным и пассивным способами. В первом случае в качестве задающего генератора используется маломощный генератор, управляемый по частоте (фазе). Во втором – пассивный кодирующий фильтр с линейной характеристикой группового запаздывания (ХГЗ) сигнала.
Рассмотрим принцип формирования ЛЧМ сигнала активным методом с электронной поддержкой линейности изменения частоты (рис.3.7.; 3.8.).
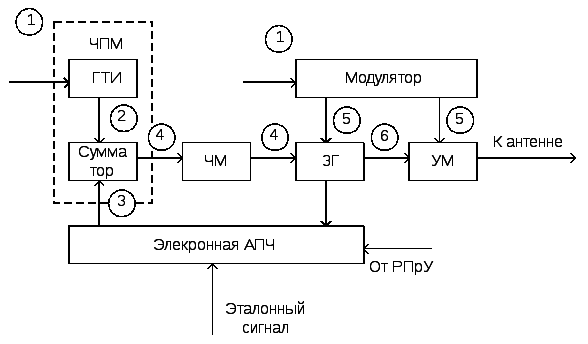
Рис.3.7. Структурная схема РПУ с ЛЧМ зондирующим сигналом (активный метод формирования).
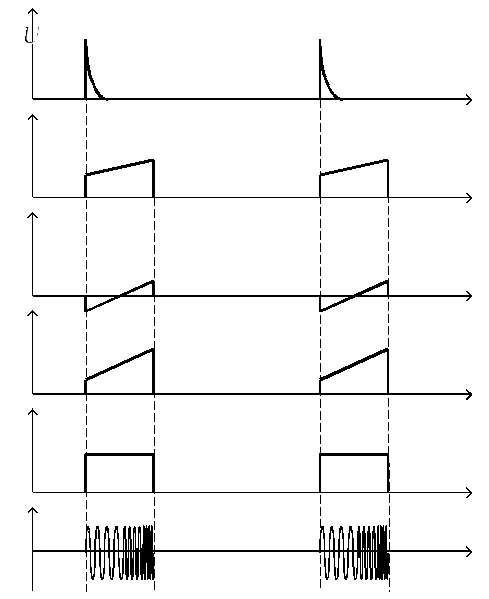
Рис.3.8. Форма напряжения на выходе элементов схемы РПУ с ЛЧМ сигналом
С
приходом импульса запуска
![]() (рис.3.8.) генератор трапецеидальных
импульсов (ГТИ) в частотном подмодуляторе
(ЧПМ) формирует трапецеидальный
видеоимпульс
(рис.3.8.) генератор трапецеидальных
импульсов (ГТИ) в частотном подмодуляторе
(ЧПМ) формирует трапецеидальный
видеоимпульс
![]() ,
структура которого определяет начальное
и конечное значение частоты ЛЧМ импульса
и закон её изменения в течение сигнала.
,
структура которого определяет начальное
и конечное значение частоты ЛЧМ импульса
и закон её изменения в течение сигнала.
Частотный
модулятор (ЧМ) усиливает видеоимпульс,
поступающий со схемы суммирования до
величины, необходимой для управления
частотой задающего генератора. Задающий
генератор в момент прихода модулирующего
видеоимпульса
![]() формирует СВЧ радиоимпульс, частота
которого изменяется по линейному закону.
Далее усилитель мощности (или цепочка
усилителей) усиливает сформированный
ЛЧМ радиоимпульс, который поступает к
антенне для излучения в пространство.
формирует СВЧ радиоимпульс, частота
которого изменяется по линейному закону.
Далее усилитель мощности (или цепочка
усилителей) усиливает сформированный
ЛЧМ радиоимпульс, который поступает к
антенне для излучения в пространство.
Схема
электронной АПЧ предназначена для
автоматического поддержания заданного
закона линейной частотной модуляции.
В АПЧ сравнивается закон линейной
частотной модуляции выходного сигнала
ЗГ с эталонным. Поскольку эталонный
сигнал действует на промежуточной
частоте (![]() ),
то производится перед сравнением
преобразование импульса ЗГ с частоты
сигнала (
),
то производится перед сравнением
преобразование импульса ЗГ с частоты
сигнала (![]() )
на промежуточную частоту с помощью
непрерывных колебаний на частоте
гетеродина (
)
на промежуточную частоту с помощью
непрерывных колебаний на частоте
гетеродина (![]() ),
поступающих, например, с радиоприемного
устройства. В случае несоответствии
законов изменения частоты эталонного
сигнала и сигнала ЗГ в электронной АПЧ
вырабатывается сигнал ошибки (
),
поступающих, например, с радиоприемного
устройства. В случае несоответствии
законов изменения частоты эталонного
сигнала и сигнала ЗГ в электронной АПЧ
вырабатывается сигнал ошибки (![]() ),
который подается на второй вход сумматора
в ЧПМ. При этом изменяется форма
трапецеидального напряжения (
),
который подается на второй вход сумматора
в ЧПМ. При этом изменяется форма
трапецеидального напряжения (![]() ),
поступающего в частотный модулятор, а,
значит, и закон изменения частоты ЗГ в
сторону уменьшения ошибки. Заметим, что
к электронной АПЧ предъявляются высокие
требования по быстродействию. Фактически
АПЧ должна мгновенно реагировать на
ошибки в законе модуляции частоты и
исправлять их так же немедленно.
),
поступающего в частотный модулятор, а,
значит, и закон изменения частоты ЗГ в
сторону уменьшения ошибки. Заметим, что
к электронной АПЧ предъявляются высокие
требования по быстродействию. Фактически
АПЧ должна мгновенно реагировать на
ошибки в законе модуляции частоты и
исправлять их так же немедленно.
Достоинством активного метода формирования ЛЧМ импульсов является возможность получения большого значения девиации частоты и, следовательно, коэффициента сжатия такого сигнала в оптимальном фильтре РПрУ. В качестве недостатков можно отметить технические сложности в обеспечении необходимой стабильности параметров ЛЧМ импульсов.
При
пассивном методе формирования ЛЧМ
сигнал получаем путем возбуждения
дисперсионной линии задержки (ДЛЗ)
коротким радиоимпульсом, вырабатываемым
генератором импульсов на частоте
![]() (рис.3.9.).
(рис.3.9.).
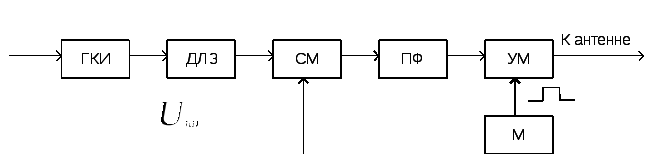
Рис.3.9. Структурная схема РПУ с ЛЧМ сигналом (пассивный метод формирования).
Выходной
ЛЧМ сигнал дисперсионной линии задержки
преобразуется в смесителе (СМ) на высокую
частоту сохранения закона частотной
модуляции и через полосовой фильтр
поступает на усилитель мощности и далее
к антенне. Полосовой фильтр необходим
для ограничения частотного спектра
формируемого ЛЧМ импульса вследствие
не идеальности формы характеристики
группового запаздывания ДЛЗ (рис.3.10.).
Полоса пропускания
![]() полосового фильтра выбирается таким
образом, чтобы время запаздывания
полосового фильтра выбирается таким
образом, чтобы время запаздывания
![]() в её пределах изменялось линейно.
в её пределах изменялось линейно.
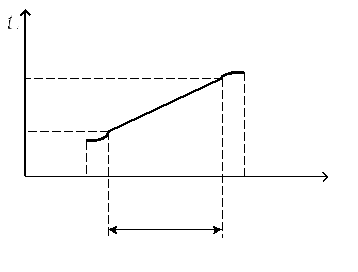
Рис.3.10.
К выбору полосы пропускания
![]() полосового фильтра.
полосового фильтра.
Достоинствами
пассивного метода формирования ЛЧМ
импульсов является высокая стабильность
параметров формируемых сигналов, хорошее
согласование их характеристик с
аналогичным по параметрам оптимальным
фильтром в РПрУ. Недостатками данного
метода являются: относительно невысокий
коэффициент сжатия такого сигнала в
оптимальном фильтре РПрУ (![]() )
из-за сравнительно малой девиации
частоты
)
из-за сравнительно малой девиации
частоты
![]() (см.рис.3.10.); малый уровень выходной
мощности сигнала на выходе ДЛЗ (большое
затухание в линии задержки); сравнительно
низкая несущая частота сигнала на выходе
ДЛЗ.
(см.рис.3.10.); малый уровень выходной
мощности сигнала на выходе ДЛЗ (большое
затухание в линии задержки); сравнительно
низкая несущая частота сигнала на выходе
ДЛЗ.
Благодаря развитию цифровой элементной базы получили применение цифровые методы формирования ЛЧМ сигналов.
Структурная схема цифрового устройства формирования ЛЧМ сигнала приведена на рис.3.11.
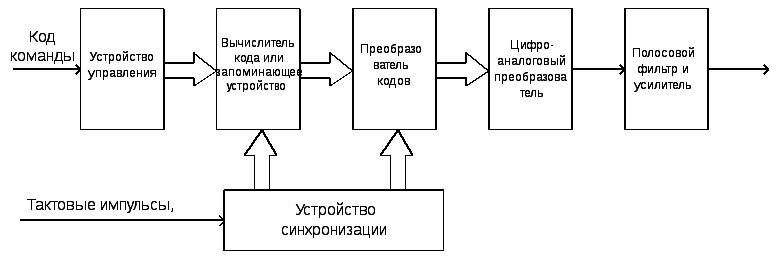
Рис.3.11. Структурная схема цифрового устройства формирования ЛЧМ импульсов.
В
качестве стартовой команды на вход
устройства управления может поступать
импульс запуска, либо цифровой код
команды от ЭВМ. Устройство управления
задает параметры формируемого сигнала
(длительность импульса
![]() ,
девиацию частоты
,
девиацию частоты
![]() ,
закон изменения частоты или фазы во
времени, начальную фазу). Вычислитель
кода используется в формирователях
рекурсивного типа (с обратной связью),
а запоминающие коды устройство – в
формирователях табличного типа. Эти
элементы схемы в моменты прихода команд
от устройства управления и тактовых
импульсов от устройства синхронизации
вычисляют или выдают заранее записанные
в памяти числовые коды (на рис.3.11. двойными
стрелками показаны параллельные линии
связи).
,
закон изменения частоты или фазы во
времени, начальную фазу). Вычислитель
кода используется в формирователях
рекурсивного типа (с обратной связью),
а запоминающие коды устройство – в
формирователях табличного типа. Эти
элементы схемы в моменты прихода команд
от устройства управления и тактовых
импульсов от устройства синхронизации
вычисляют или выдают заранее записанные
в памяти числовые коды (на рис.3.11. двойными
стрелками показаны параллельные линии
связи).
Известны два принципа представления аналогового сигнала цифровым кодом: с фиксированным тактом (рис.3.12,а.) и с фиксированным уровнем отсчетов (рис.3.12,б.).
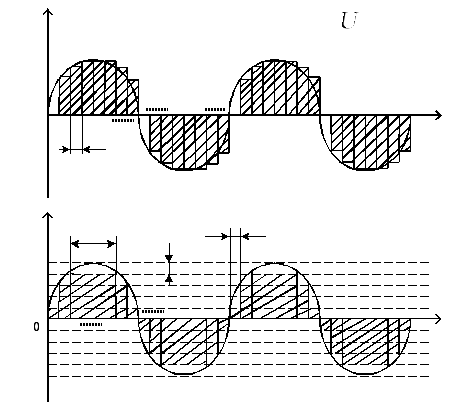
Рис.3.12.
Принцип представления аналогового
сигнала а) с фиксированной длительностью
такта
![]() ;
б) с фиксированным уровнем отсчетов
;
б) с фиксированным уровнем отсчетов
![]() .
.
При
работе с работе с фиксированной
длительностью такта отсчетов
![]() (рис.3.12,а.) вычисляется (рекурсивный
метод) или считывается из элемента
памяти (табличный метод) числовой код,
соответствующий мгновенному значению
напряжения
(рис.3.12,а.) вычисляется (рекурсивный
метод) или считывается из элемента
памяти (табличный метод) числовой код,
соответствующий мгновенному значению
напряжения
![]() в фиксированные моменты времени
в фиксированные моменты времени
![]() .
.
При
формировании сигнала с фиксированным
уровнем отсчетов с интервалом амплитуды
напряжения
![]() вычисляется или считывается с элемента
памяти числовой код, соответствующий
моментам времени
вычисляется или считывается с элемента
памяти числовой код, соответствующий
моментам времени
![]() ,
в которые амплитуда напряжении равна
фиксированному уровню
,
в которые амплитуда напряжении равна
фиксированному уровню
![]() (рис.3.12,б.).
(рис.3.12,б.).
Преобразователь кодов совместно с цифро-аналоговым преобразователем обеспечивают преобразование числовых кодов в ступенчатое напряжение, дискретно аппроксимирующее формируемый ЛЧМ сигнал (на рис.3.12,а,б – заштрихованные области).
Рассмотрим
амплитудно-частотные спектры (АЧС) таких
сигналов. С целью некоторого упрощения
процесса вычисления АЧС рассмотрим
вначале периодическую последовательность
видеоимпульсов, промодулированную
синусоидой с частотой
![]() (рис.3.13.).
(рис.3.13.).
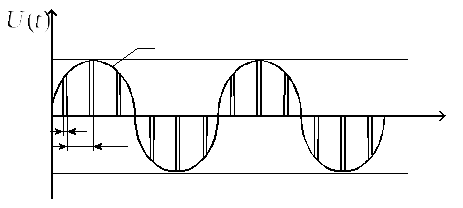
Рис.3.13. Периодическая последовательность видеоимпульсов промодулированных по амплитуде.
На периодической немодулированной последовательности видеоимпульсов можно записать
![]() ,
,
где
![]() - амплитуда видеоимпульсов.
- амплитуда видеоимпульсов.
Определим
спектральный состав видеоимпульсов
![]() ,
для этого разложим в ряд Фурье периодическую
функцию
,
для этого разложим в ряд Фурье периодическую
функцию
![]() при условии, что функция
при условии, что функция
![]() четная:
четная:
![]() (3.1)
(3.1)
где
 .
.
Амплитудно-частотный спектр периодической последовательности видеоимпульсов представлен на рис.3.14.
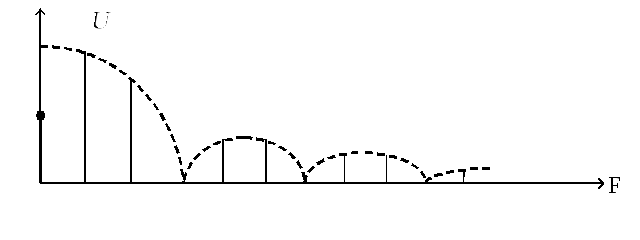
Рис.3.14. Спектр периодической последовательности прямоугольных видеоимпульсов.
Последовательность
видеоимпульсов (рис.3.13) отличается от
рассмотренной выше периодической
последовательности множителем
![]() .
Поэтому спектр такой последовательности
определяется следующим соотношением
.
Поэтому спектр такой последовательности
определяется следующим соотношением
 (3.2)
(3.2)

Рис.3.15. Спектр модулированной последовательности видеоимпульсов.
В
полученном спектре отсутствуют
спектральные линии на частотах, кратных
частоте повторения. Спектральные линии
оказываются сдвинутыми в обе стороны
от этих значений на величину
![]() (рис.3.15.).
(рис.3.15.).
Дискретный
ЛЧМ сигнал так же представляет
последовательность видеоимпульсов,
промодулированную синусоидальным
напряжением, частота которого изменяется
в течение импульса в соответствие с
законом модуляции. Поэтому, можно
показать, что амплитудно-частотные
спектры
![]() таких дискретных ЛЧМ сигналов, полученных
на выходе цифро-аналогового преобразователя
являются периодическими, но многочастотными.
таких дискретных ЛЧМ сигналов, полученных
на выходе цифро-аналогового преобразователя
являются периодическими, но многочастотными.
В
случае фиксированного такта отсчетов
длительности всех ступенек напряжения
одинаковы и равны
![]() (рис.3.12,а.) и, по аналогии и рис.3.15.,
амплитудно-частотный спектр будет иметь
вид, представленный на рис.3.16.
(рис.3.12,а.) и, по аналогии и рис.3.15.,
амплитудно-частотный спектр будет иметь
вид, представленный на рис.3.16.

Рис.3.16. Спектр дискретного ЛЧМ сигнала с фиксированной длительностью такта.
Он
состоит из двух основных от
![]() до
до
![]() ,
от
,
от
![]() до
до
![]() и т.д. и инверсных (с обратными наклонами
частотной модуляции) от
и т.д. и инверсных (с обратными наклонами
частотной модуляции) от
![]() до
до
![]() ,
от
,
от
![]() до
до
![]() и т.д. ЛЧМ составляющих спектра с
одинаковыми девиациями
и т.д. ЛЧМ составляющих спектра с
одинаковыми девиациями
![]() ,
,
![]() и т.д. Здесь
и т.д. Здесь
![]() - частота следования тактовых импульсов,
постепающих на устройство синхронизации.
С помощью полосового фильтра, подключенного
к выходу цифро-аналогового преобразователя,
можно получить аналоговый ЛЧМ сигнал
в полосе частот соответствующей любой
как основной, так и инверсной составляющей
спектра (рис.3.16.).
- частота следования тактовых импульсов,
постепающих на устройство синхронизации.
С помощью полосового фильтра, подключенного
к выходу цифро-аналогового преобразователя,
можно получить аналоговый ЛЧМ сигнал
в полосе частот соответствующей любой
как основной, так и инверсной составляющей
спектра (рис.3.16.).
В
случае фиксированного уровня отсчетов
амплитуды длительности ступенек
напряжения дискретного ЛЧМ сигнала
неодинаковы и составляют величину от
![]() до
до
![]() (рис.3.12,б.). В этот случае амплитудно-частотный
спектр имеет вид, представленный на
рис.3.17.
(рис.3.12,б.). В этот случае амплитудно-частотный
спектр имеет вид, представленный на
рис.3.17.
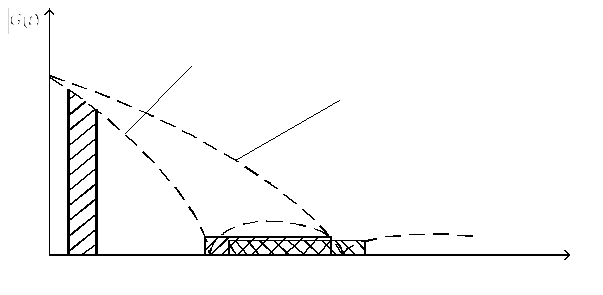
Рис.3.17. Спектр дискретного ЛЧМ сигнала с фиксированным уровнем отсчетов амплитуды.
Здесь
![]() и
и
![]() - нижняя и верхняя эквивалентные тактовые
частоты дискретного ЛЧМ сигнала при
этом
- нижняя и верхняя эквивалентные тактовые
частоты дискретного ЛЧМ сигнала при
этом
![]() в данном случае с помощью обычного
неперестраиваемого по частоте в течение
длительности сигнала полосового фильтра,
подключенного к выходу цифро-аналогового
преобразователя можно получить аналоговый
ЛЧМ сигнал в полосе частот от
в данном случае с помощью обычного
неперестраиваемого по частоте в течение
длительности сигнала полосового фильтра,
подключенного к выходу цифро-аналогового
преобразователя можно получить аналоговый
ЛЧМ сигнал в полосе частот от
![]() до
до
![]() ,
соответствующий только основной
составляющей спектра, приведенного на
рис.3.17.
,
соответствующий только основной
составляющей спектра, приведенного на
рис.3.17.
Предельная
девиация частоты ЛЧМ сигналов в таких
цифровых формирователях составляет
![]() .
На практике для обеспечения приемлемого
качества частотной селекции выходных
ЛЧМ колебаний с помощью типовых
неперестраиваемых полосовых фильтров
она не превышает
.
На практике для обеспечения приемлемого
качества частотной селекции выходных
ЛЧМ колебаний с помощью типовых
неперестраиваемых полосовых фильтров
она не превышает
![]() .
Минимальная длительность сигналов,
максимальная несущая частота, максимальная
девиация частоты ограничиваются
быстродействием существующей цифровой
элементной базы
.
Минимальная длительность сигналов,
максимальная несущая частота, максимальная
девиация частоты ограничиваются
быстродействием существующей цифровой
элементной базы
Ограничений
по максимальной длительности формируемых
ЛЧМ сигналов практически нет. В настоящее
время реализованы цифровые формирователи
ЛЧМ сигналов на средней несущей частоте
![]() МГц,
МГц,
![]() МГц,
МГц,
![]() мкс.
Поэтому области применения цифровых
формирователей примерно такие же, как
и пассивных формирователей ЛЧМ сигналов.
мкс.
Поэтому области применения цифровых
формирователей примерно такие же, как
и пассивных формирователей ЛЧМ сигналов.
Достоинствами цифровых методов формирования ЛЧМ сигналов являются: возможность гибкого изменения в широких пределах параметров ЛЧМ сигналов, в том числе с управлением от ЭВМ; достаточно высокая стабильность частоты и параметров частотной модуляции.
Недостатки – трудность реализации при малой длительности формируемых сигналов, ограничения по максимальной величине девиации частоты и несущей частоте, близкие по своим значениям по существующим ограничениям для пассивного метода формирования ЛЧМ сигнала.
Формирование ФКМ сигналов так же может производиться активным или пассивным методом. В случае активного метода формирования (рис.3.18.) с помощью генератора видеокода (ГВК) происходит попеременная передача на вход сумматора двух когерентных противофазных колебаний. Эпюры напряжений на элементах схемы (рис.3.18.), поясняющие принцип формирования ФКМ сигнала, приведены на рис.3.19. Изменение фазы задающего кварцевого генератора (Кв.Г.) осуществляется в соответствии с кодом формируемого сигнала.

Рис.3.18. Структурная схема РПУ с ФКМ зондирующим сигналом.
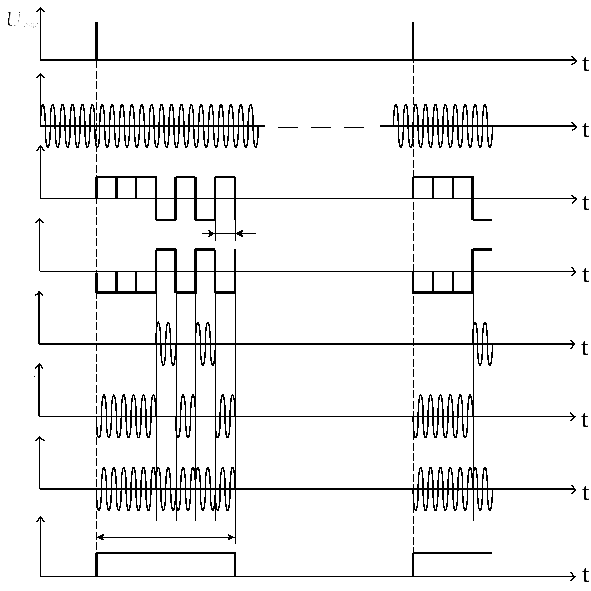
Рис.3.19. Эпюры напряжений на элементах РПУ с ФКМ зондирующим сигналом
Преобразователь частоты (ПЧ) обеспечивает перенос спектра сигнала задающего кварцевого генератора в область рабочих частот РЛС. Активный метод формирования ФКМ сигнала позволяет формировать зондирующие сигналы большой длительности, с любым числом дискрет. Однако сформированный сигнал обладает не достаточной стабильностью параметров.
При пассивном методе в качестве формирователя ФКМ сигналов (рис.3.20.) используется линия задержки с N отводами, в каждый из отводов которой включен фазовращатель. Число отводов N линий задержки равно числу дискрет ФКМ сигналов.
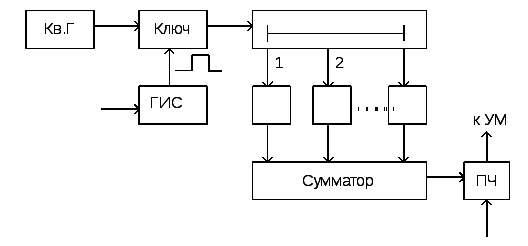
Рис.3.20. Структурная схема формирователя ФКМ сигнала пассивным методом.
С
приходом импульса запуска генератор
импульсов строба (ГИС) формирует
видеоимпульсы длительностью
![]() равной длительности одной дискреты ФКМ
сигнала. Видеоимпульс ГИС открывает
ключ и из непрерывных колебаний кварцевого
генератора вырезается, радиоимпульсы
длительностью
равной длительности одной дискреты ФКМ
сигнала. Видеоимпульс ГИС открывает
ключ и из непрерывных колебаний кварцевого
генератора вырезается, радиоимпульсы
длительностью
![]() и поступает на линию задержки с
максимальной задержкой сигнала
и поступает на линию задержки с
максимальной задержкой сигнала
![]() .
Последовательно по времени на каждый
вход сумматора поступает радиоимпульс
длительностью
.
Последовательно по времени на каждый
вход сумматора поступает радиоимпульс
длительностью
![]() .
Значение начальной фазы радиоимпульса
.
Значение начальной фазы радиоимпульса
![]() определяется установленным в данном
отводе линии задержки фазовращателем.
Радиоимпульсы складываются последовательно
во времени в сумматоре, формируя N –
позиционный фазокодоманипулированный
сигнал. Достоинством пассивного метода
является высокая стабильность параметров
формируемого сигнала. Недостатком –
сложность формирования сигналов большой
длительности (затухание сигналов в
линии задержки с большим числом отводов).
определяется установленным в данном
отводе линии задержки фазовращателем.
Радиоимпульсы складываются последовательно
во времени в сумматоре, формируя N –
позиционный фазокодоманипулированный
сигнал. Достоинством пассивного метода
является высокая стабильность параметров
формируемого сигнала. Недостатком –
сложность формирования сигналов большой
длительности (затухание сигналов в
линии задержки с большим числом отводов).