

2.2. Способы обзора зоны обнаружения и их влияние на боевые возможности рлс
Информацию о наличии целей в зоне обнаружения РЛС получают в процессе обзора её элементов разрешения. Время, затрачиваемое на однократный обзор зоны, а так же очередность просмотра её элементов разрешения определяются способами обзора. Кроме того, от способа обзора зависит и значение средней мощности зондирующих сигналов РЛС. Непрерывный обзор зоны обнаружения является обязательным режимом функционирования РЛС.
В существующих РЛС используют различные способы обзора зоны обнаружения . Выбор того или иного способа обзора зависит от назначения РЛС, поскольку от него зависят многие характеристики РЛС:
время обнаружения цели в зоне;
количество измеряемых координат и точность их измерения;
разрешающие способности по угловым координатам, дальности и радиальной скорости;
скорость обновления информации;
помехозащищенность РЛС (особенно от пассивных помех).
Обзор зоны обнаружения обеспечивается, в основном, выбором формы диаграммы направленности антенны РЛС (на прием и передачу) и закона изменения ее положения в пространстве, при которых в наибольшей степени обеспечиваются заданные тактико-технические требования.
В зависимости от времени, затрачиваемого на получение информации от всех элементов зоны обнаружения , различают следующие виды обзора:
параллельный (число антенных лучей равно числу элементов разрешения по угловым координатам, рис. 2.3 а, б);
последовательный (зона обнаружения просматривается одним антенным лучом, перемещение которого осуществляется последовательно во времени по углу места и по азимуту, рис. 2.4, а);
смешанный (по одной угловой координате (чаще всего по углу места) осуществляется параллельный обзор,
СТР 9
---------------------------------------------------------------------------------------------------------------------
а по другой (азимуту) - последовательный; рис. 2.4, б).
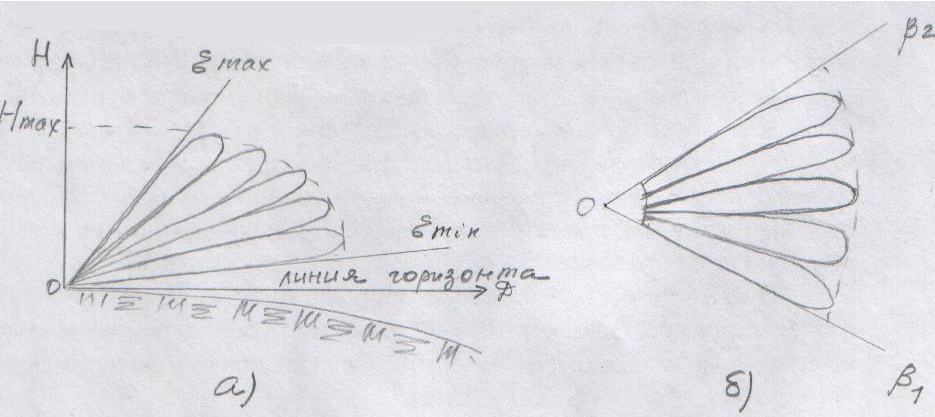

Рис. 2.3 Виды параллельного обзора: а) – в угломестной плоскости; б) – в азимутальной плоскости.
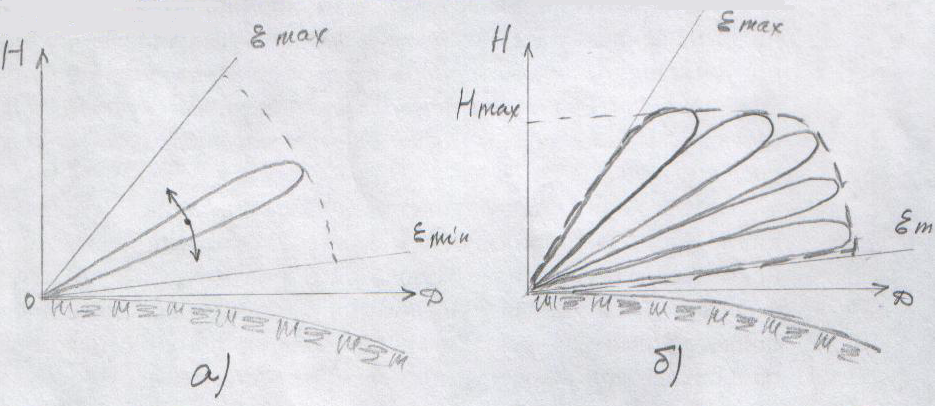

Рис. 2.4 Виды обзора : а) - последовательный по углу места и по азимуту; б) – смешанный обзор: параллельный по углу места и последовательный по азимуту.
Обзор зоны обнаружения по дальности осуществляется последовательно по мере распространения электромагнитной энергии после излучения зондирующего сигнала с конечной скоростью до цели и обратно.
Параллельный обзор по угловым координатам обладает наибольшим , по сравнению с другими видами обзора, темпом обновления информации. Однако сложность реализации антенной системы не позволила пока использовать его в РЛС РТВ.
СТР 10
---------------------------------------------------------------------------------------------------------------------
Рассмотрим далее способы обзора зоны обнаружения , реализуемые в средствах радиолокации РТВ.
-
РЛС просматривает зону обнаружения
 (рис. 2.5,а). Диаграммы направленности
антенны на передачу (штриховая линия)
и на прием ( сплошная линия) одинаковые.
Ширина ДНА в вертикально (угломестной
) плоскости соответствует угловому
размеру зоны обнаружения в этой
плоскости. Обзор по азимуту осуществляется
последовательно. Данный способ обзора
чаще используется в радиолокационных
дальномерах метрового диапазона волн.
Для уменьшения провалов в зоне
обнаружения, обусловленных отражением
электромагнитной энергии от земли, в
подобных РЛС необходимо использовать
либо систему облучателей в случае
зеркальных антенн, либо несколько
этажей – в случае директорных антенн.
Взаимное
(рис. 2.5,а). Диаграммы направленности
антенны на передачу (штриховая линия)
и на прием ( сплошная линия) одинаковые.
Ширина ДНА в вертикально (угломестной
) плоскости соответствует угловому
размеру зоны обнаружения в этой
плоскости. Обзор по азимуту осуществляется
последовательно. Данный способ обзора
чаще используется в радиолокационных
дальномерах метрового диапазона волн.
Для уменьшения провалов в зоне
обнаружения, обусловленных отражением
электромагнитной энергии от земли, в
подобных РЛС необходимо использовать
либо систему облучателей в случае
зеркальных антенн, либо несколько
этажей – в случае директорных антенн.
Взаимное

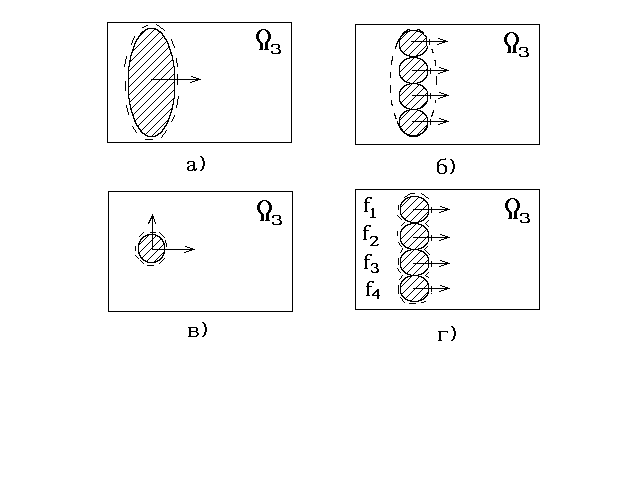
Рис. 2.5 Виды обзора зоны обнаружения : а) – с одинаковыми ДНА на передачу и прием; б) – с раздельными антеннами на передачу и прием; в) – с игольчатой ДНА; г) с параллельными ДНА на передачу и прием.
СТР 11
---------------------------------------------------------------------------------------------------------------------
положение облучателей (этажей) определяется длинной волны, высотой фазового центра антенны и особенностями (изрезанностью) рельефа местности.
-
РЛС с раздельными на передачу и прием антеннами (рис. 2.5,б) просматривает зону обнаружения
 .
ДНА на передачу такая же, как и в
предыдущем способе. Приемная антенна
состоит из ряда парциальных каналов с
игольчатыми ДН, смещенными в угломестной
плоскости. Подобный способ обзора
применяется в одночастотный
трехкоординатных РЛС с зеркальными
антеннами и многоканальным облучателем
на прием и в РЛС с пассивными ФАР.
.
ДНА на передачу такая же, как и в
предыдущем способе. Приемная антенна
состоит из ряда парциальных каналов с
игольчатыми ДН, смещенными в угломестной
плоскости. Подобный способ обзора
применяется в одночастотный
трехкоординатных РЛС с зеркальными
антеннами и многоканальным облучателем
на прием и в РЛС с пассивными ФАР. -
Радиолокатор просматривает сектор обзора одним игольчатым лучом на передачу и прием последовательно во времени по углу места и азимуту (рис. 2.5, в). Способ обзора зоны обнаружения применяется в РЛС с активной ФАР и в радиовысотомерах.
-
Обзор зоны обнаружения производится параллельно по углу места и последовательно по азимуту с помощью парциальных ДН на передачу и на прием. Способ обзора применяется в многочастотных радиолокационных дальномерах сантиметрового диапазона волн и трехкоординатных РЛС с частотным или электронным управлением лучом ДНА в угломестной плоскости.
Кроме того, обзор зоны обнаружения , особенно в азимутальной плоскости, может осуществляться по жесткой и гибкой (адаптивной) программам. В случае работы по жесткой программе вращение антенной системы в азимутальной плоскости производится с постоянно заданной скоростью. Такая программа характерна для всех четырех видов обзора. Однако при третьем виде обзора луч ДНА после каждого оборота смещается в угломестной плоскости (так называемый винтовой способ обзора (см. рис. 2.6,а)). При третьем виде обзора могут использоваться и другие способы перемещения луча
СТР 12
---------------------------------------------------------------------------------------------------------------------
ДНА в угломестной и азимутальной плоскостях: растровый (рис. 2.6,б); циклоидальный (рис. 2.6,г).
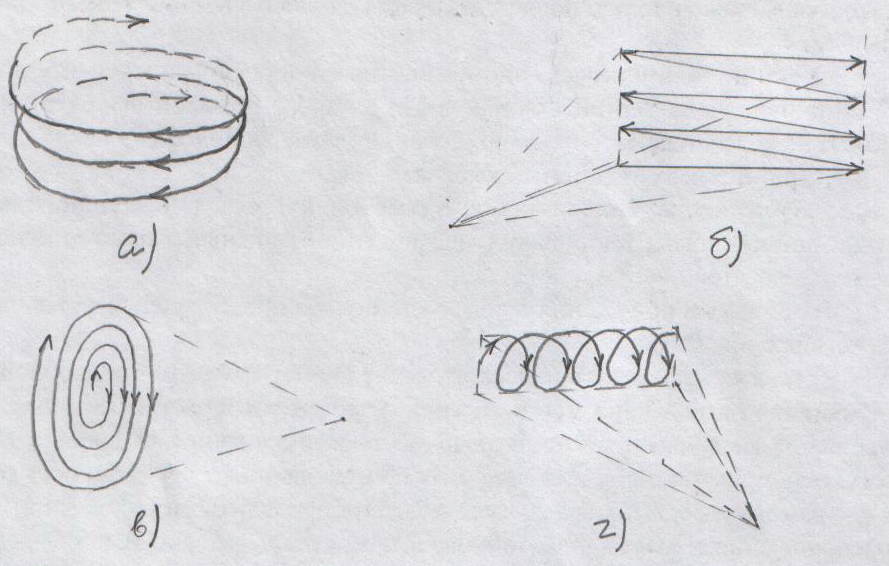
Рис 2.6 Способы обзора зоны обнаружения РЛС с игольчатой ДНА: а) винтовой; б) сточный или растровый; в) спиральный; г) циклоидальный.
Следует заметить, что при жесткой программе обзора темп (скорость) перемещения ДНА не зависит от промежуточных результатов радиолокационного наблюдения.
При последовательном (см. рис. 2.5,в) адаптивном обзоре программа просмотра зоны обнаружения в зависимости от результатов предшествующих этапов обзора может изменяться автоматически. При этом могут варьироваться (изменяться) очередность, время просмотра, форма и размеры различных элементов зоны обнаружения, энергетические характеристики (мощность и длительность) зондирующих сигналов, а также структура сигналов (внутриимпульсная модуляция, частота следования). Адаптивный обзор зоны обнаружения возможен в РЛС с ФАР. При этом параметры программы обзора изменяются с помощью блока уравнения, на которой поступает информация от предыдущих этапов обзора, а также априорные данные.
СТР 13
--------------------------------------------------------------------------------------------------------------------------------
Проведем сравнительный анализ способов обзора зоны обнаружения (рис 2.5,а, б, в, г). При анализе способов обзора будем считать, что РЛС имеют одинаковые параметры зоны обнаружения, одинаковое время обзора и равномерную скорость обзора. Зону обзора будем считать изодальностной (см. рис. 2.1)
В результате сравнения способов обзора можно сделать следующие выводы:
-
Информационная способность второго, третьего и четвертого способов обзора выше, чем при использовании первого способа. В отличие от первого они позволяют кроме дальности и азимута определить высоту полета цели (при достаточном количестве парциальных каналов во втором и четвертом способах).
-
Возможности второго, третьего и четвертого способов обзора одинаковы по разрешающей способности по угловым координатам. Первый способ обзора не обладает разрешающей способностью по углу места. Более высокая точность измерения угла места достигается в третьем способе обзора при одинаковой ширине парциальных лепестков ДН во втором, третьем и четвертом способах обзора.
-
В условиях воздействия пассивных помех более высокая помехозащищенность РЛС обеспечивается более высокая разрешающая способность по углу места (меньше разрешаемый объем) по сравнению с первым способом. Кроме того, в
 раз меньше скорость перемещения луча
ДН по сравнению с третьим способом
обзора (
раз меньше скорость перемещения луча
ДН по сравнению с третьим способом
обзора ( -
число парциальных каналов). Снижение
скорости обзора приводит к уменьшению
среднеквадратического разброса
доплеровских частот в спектре эхо-сигнала
пассивных помех и, следовательно, к
повышению коэффициента подавления
помех, реализуемого в системе СДЦ.
-
число парциальных каналов). Снижение
скорости обзора приводит к уменьшению
среднеквадратического разброса
доплеровских частот в спектре эхо-сигнала
пассивных помех и, следовательно, к
повышению коэффициента подавления
помех, реализуемого в системе СДЦ.
В условиях активных помех лучшими способами обзора являются третий и четвертый. При четвертом способе обзора РЛС может работать на различных частотах в парциальных каналах. Третий и четвертый способы
СТР 14
--------------------------------------------------------------------------------------------------------------------------------
при электрическом управлении антенным лучом позволяют реализовать программный адаптивный обзор.
-
С точки зрения минимальной стоимости, сложности и объема аппаратуры РЛС лучшим способом обзора является первый, худшим – четвертый.
-
Если при первом способе обзора требуется ширина ДН, в вертикальной плоскости обеспечивается не за счет облучателя, а за счет уменьшения вертикального размера зеркала в m раз (
 – количество парциальных каналов при
втором и четвертом способах обзора),
то эффективная площадь приемной антенны
при этом способе обзора оказывается в
m
раз меньше эффективной площади антенны
при других способах обзора. Для сохранения
заданной дальности действия РЛС энергию,
излучаемую в зону обнаружения необходимо
увеличить в m
раз.
– количество парциальных каналов при
втором и четвертом способах обзора),
то эффективная площадь приемной антенны
при этом способе обзора оказывается в
m
раз меньше эффективной площади антенны
при других способах обзора. Для сохранения
заданной дальности действия РЛС энергию,
излучаемую в зону обнаружения необходимо
увеличить в m
раз.
В случае изовысотной зоны обнаружения (рис. 2.1) наихудшим, с точки зрения рационального распределения излучаемой энергии по углу места, является первый способ обзора.
СТР 15
---------------------------------------------------------------------------------------------------------------------