

4.5.1. Прием и преобразование фкм сигналов
Фазокодоманипулированный
радиоимпульс длительностью
![]() состоит из
состоит из
![]() парциальных импульсов длительностью
парциальных импульсов длительностью
![]() ,
в каждый из которых вводится соответствующий
фазовый сдвиг. Аналитически ФКМ
радиоимпульс записывается в виде
,
в каждый из которых вводится соответствующий
фазовый сдвиг. Аналитически ФКМ
радиоимпульс записывается в виде
![]() ,
,
где
![]() - амплитуда
- амплитуда
![]() -го
парциального радиоимпульса (как правило,
одинаковая для всех парциалов);
-го
парциального радиоимпульса (как правило,
одинаковая для всех парциалов);
![]() -
частота;
-
частота;
![]() -
начальная фаза колебаний
-
начальная фаза колебаний
![]() -го
парциального импульса.
-го
парциального импульса.
Условно ФКМ импульс изображается в виде, показанном на рис.4.25,а.
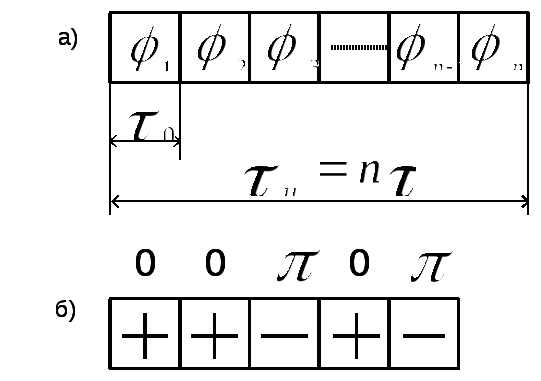
Рис.4.25. Структура ФКМ сигнала
Порядок
чередования фаз задается кодирующей
последовательностью. На практике
применяют противофазную манипуляцию,
при которой начальные фазы принимают
только два значения – 0 или
![]() (рис.4.25,б). Ширина спектра ФКМ радиоимпульса
обратно пропорциональна длительности
парциального импульса, а
(рис.4.25,б). Ширина спектра ФКМ радиоимпульса
обратно пропорциональна длительности
парциального импульса, а
![]() равен числу парциалов:
равен числу парциалов:
![]() ;
;
![]() .
.
Пример реализации приемного устройства с согласованным фильтром на промежуточной частоте для ФКМ сигналов приведен на рис.4.26.

Рис.4.26. Структурная схема приемного устройства ФКМ сигналов
Принимаемый
сигнал после преобразования на
промежуточную частоту и предварительного
усиления в широкополосном УПЧ, поступает
на оптимальный фильтр одиночного
импульса (ОФОИ), полоса пропускания
которого согласована шириной спектра
парциального импульса. Далее следует
линия задержки с отводам. Число отводов
равно (![]() )
(первый отвод без задержки), а время
задержки между отводами
)
(первый отвод без задержки), а время
задержки между отводами
![]() .
Фазовый сдвиг на каждом отводе изменяется
в соответствии с фазовым кодом сигнала,
так что на схеме сложения фазы парциалов
совпадают в конце импульса. Импульсная
характеристика фильтра также должна
быть зеркальной по отношению к структуре
сигнала. Результат обработки ФКМ сигнала
пяти элементным кодом Баркера приведен
на рис.4.27. Здесь на рис.4.27,а приведена
структурная схема фильтра, на рис.4.27,б
– структура ФКМ сигнала, на рис.4.27,в –
структура ФКМ сигналов на входе сумматора
(
.
Фазовый сдвиг на каждом отводе изменяется
в соответствии с фазовым кодом сигнала,
так что на схеме сложения фазы парциалов
совпадают в конце импульса. Импульсная
характеристика фильтра также должна
быть зеркальной по отношению к структуре
сигнала. Результат обработки ФКМ сигнала
пяти элементным кодом Баркера приведен
на рис.4.27. Здесь на рис.4.27,а приведена
структурная схема фильтра, на рис.4.27,б
– структура ФКМ сигнала, на рис.4.27,в –
структура ФКМ сигналов на входе сумматора
(![]() )
фильтра, на рис.4.27,г – результат
суммирования сигналов, на рис.4.27,д –
огибающая сигнала на выходе оконечного
фильтра.
)
фильтра, на рис.4.27,г – результат
суммирования сигналов, на рис.4.27,д –
огибающая сигнала на выходе оконечного
фильтра.
Таким
образом, сжатый сигнал на выходе
оконечного фильтра имеет длительность
по нулевому уровню равную
![]() и боковые лепестки амплитудой не более
амплитуды одного парциального импульса.
Амплитуда главного лепестка в идеале
в
и боковые лепестки амплитудой не более
амплитуды одного парциального импульса.
Амплитуда главного лепестка в идеале
в
![]() раз больше амплитуды парциального
импульса.
раз больше амплитуды парциального
импульса.
Фильтровой приемник при малых рассогласованиях по частоте инвариантен к времени прихода сигналов и является одноканальным устройством по дальности. Если же это условие не выполняется, то когерентная обработка сигналов в пределах их длительности невозможна без учета доплеровского сдвига частот. Это обстоятельство приводит, с одной стороны, к необходимости использования многоканальных по частоте приемных устройств, с другой стороны – к появлению дополнительных возможностей, состоящих в селекции целей по скорости.
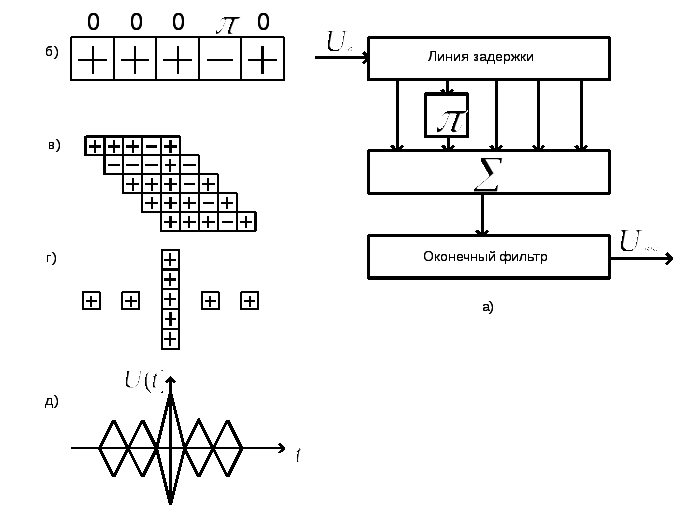
Рис.4.27.Структурная схема фильтра и результат обработки ФКМ сигнала
Приведенные схемы фильтровых приемников обладают недостатком многосигнальности, а именно, каждому сигналу требуется свой фильтр и наоборот. Поэтому развивается новое направление – построение управляемых (программно или адаптивно) фильтров. Такие фильтры предпочтительнее строить на цифровых элементах.
Широкое распространение получили трансверсальные фильтры (рис.4.28).
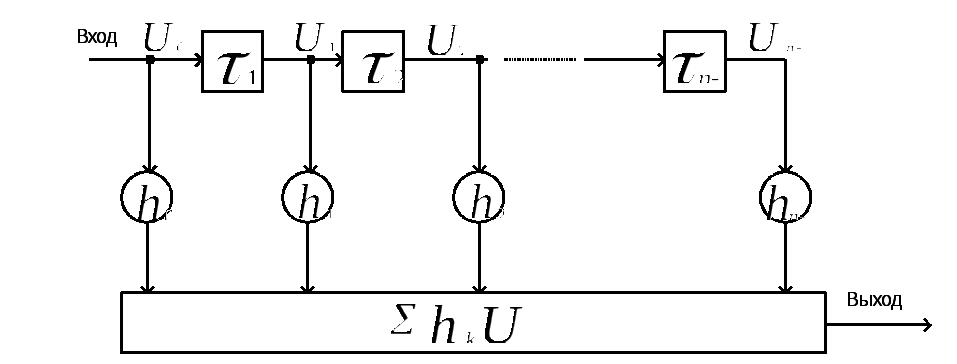
Рис.4.28.Структурная схема трансверсального фильтра
Такие
фильтры включают каскады задержки
дискретных значений квадратурных
составляющих входного сигнала, получаемых
с тактовой частотой
![]() .
Выходной сигнал фильтра получается
путем весового суммирования измеренных
значений входного сигнала. Передаточная
системная функция трансверсального
фильтра описывается выражением
.
Выходной сигнал фильтра получается
путем весового суммирования измеренных
значений входного сигнала. Передаточная
системная функция трансверсального
фильтра описывается выражением
![]() ,
,
где
![]() - символ, служащий оператором единичной
задержки (на один интервал дискретизации)
в
- символ, служащий оператором единичной
задержки (на один интервал дискретизации)
в
![]() - области.
- области.
Передаточная
или системная функция фильтра есть
![]() - преобразование его импульсной
характеристики. Поскольку выходной
сигнал фильтра
- преобразование его импульсной
характеристики. Поскольку выходной
сигнал фильтра
![]() есть свертка входного сигнала и
импульсной характеристики, то выходному
сигналу отвечает функция
есть свертка входного сигнала и
импульсной характеристики, то выходному
сигналу отвечает функция
![]() ,
,
где
![]() -
-
![]() -
преобразование входного сигнала
-
преобразование входного сигнала
![]() ,
,
![]() .
.
Чтобы получить частотный коэффициент передачи дискретного (цифрового) фильтра из его передаточной (системной) функции, в последней нужно сделать подстановку
![]() ,
,
где
![]() - интервал дискретизации сигнала.
- интервал дискретизации сигнала.
Таким
образом,
![]() - частотная характеристика цифрового
(дискретного) трансверсального фильтра.
Число
- частотная характеристика цифрового
(дискретного) трансверсального фильтра.
Число
![]() называется порядком трансверсального
фильтра.
называется порядком трансверсального
фильтра.
При
заданном шаге дискретизации
![]() можно реализовать самые разнообразные
формы АЧХ, подбирая должным образом
весовые коэффициенты
можно реализовать самые разнообразные
формы АЧХ, подбирая должным образом
весовые коэффициенты
![]() фильтра.
фильтра.
Коэффициенты сжатия сигналов на трансверсальных фильтрах могут достигать значений, лежащих в пределах 500 … 1000.