

2.3.2. Зона обнаружения целей радиовысотомерами
Подвижный радиолокационный высотомер (ПРВ) представляет собой одноканальную импульсную РЛС. Его антенна формирует однолепестковую ДН лопаточного вида (узкую в угломестной плоскости (0,5…0,8*)и сравнительно широкую (несколько градусов) в азимутальной плоскости). Для осуществления обзора пространстваи измерения угла места цели производится механическое качание антенны в вертикальной плоскости (рис. 2.8,а).

а) б)
Рис. 2.8 Зона обнаружения радиолокационного высотомера: а) полусечение зоны обнаружения угломестной плоскостью; б) движение луча ДНА в секторном режиме обзора.
В
пределах углов
![]() …
…![]() .
Система вращения антенны (или ППК)
обеспечивает установку антенны на
азимут цели (в режиме работы по целеуказанию
от дальномера) либо вращение
.
Система вращения антенны (или ППК)
обеспечивает установку антенны на
азимут цели (в режиме работы по целеуказанию
от дальномера) либо вращение
СТР 23
---------------------------------------------------------------------------------------------------------------------
ее с заданной скоростью вкруговую или в установленном секторе.
Режимы
работы секторный и круговой считаются
дополнительными, автономными. В секторном
режиме работы антенна ПРВ достаточно
быстро качается в угломестной плоскости
и медленно разворачивается по азимуту
в установленном секторе
![]() …
…![]() .
(рис. 2.8,б). Этот режим может задаваться
ПРВ для обзора секторов, в которых
дальномер перегружен шумовыми помехами,
а также для обнаружения высотных
малоразмерных целей. Заметим, что ПРВ
в режимах секторного обзора и по
целеуказанию создает изодальностную
зону обнаружения (см. рис. 2.8). Поэтому
некоторая часть электромагнитной
энергии зондирующих сигналов расходуется
неэффективно при обзоре зоны обнаружения
под большими углами места (см. рис.
2.8,а).
.
(рис. 2.8,б). Этот режим может задаваться
ПРВ для обзора секторов, в которых
дальномер перегружен шумовыми помехами,
а также для обнаружения высотных
малоразмерных целей. Заметим, что ПРВ
в режимах секторного обзора и по
целеуказанию создает изодальностную
зону обнаружения (см. рис. 2.8). Поэтому
некоторая часть электромагнитной
энергии зондирующих сигналов расходуется
неэффективно при обзоре зоны обнаружения
под большими углами места (см. рис.
2.8,а).
При работе в круговом режиме антенны высотомера фиксируется на заданном угле места и с достаточно высокой скоростью вращения по азимуту. Данный режим используется в основном для обнаружения маловысотных целей. Для расширения границ зоны обнаружения в угломестной плоскости применяют двух или трехвитковый оборот антенны по азимуту. Дальнейшее увеличение числа витков считается нецелесообразным, так как приведет к недопустимому увеличению времени обзора зоны обнаружения.
СТР 24
---------------------------------------------------------------------------------------------------------------------
2.3.3. Зоны обнаружения целей трехкоординатными рлс
Для
измерения в процессе обзора зоны
обнаружения трех пространственных
координат (![]() )
необходимо применение антенн с узкими
диаграммами направленности, как по
азимуту, так и по углу места. Однако при
наличии одного узкого луча недопустимо
увеличивается время обзора пространства
(см. рис. 2.5,в). Обеспечить одновременный
обзор всех угломестных направлений в
заданном секторе в трехкоординатных
РЛС можно следующими методами:
)
необходимо применение антенн с узкими
диаграммами направленности, как по
азимуту, так и по углу места. Однако при
наличии одного узкого луча недопустимо
увеличивается время обзора пространства
(см. рис. 2.5,в). Обеспечить одновременный
обзор всех угломестных направлений в
заданном секторе в трехкоординатных
РЛС можно следующими методами:
методом V- луча;
методом парциальных диаграмм;
методом частотного сканирования луча ДНА В угломестной плоскости;
гониометрическим методом.
Все перечисленные методы предполагают механическое вращение антенны (ППК) в азимутальной плоскости.
-
Метод V- луча.
Антенная система РЛС состоит из двух антенн, формирующих вертикальную и наклонную диаграммы направленности (рис. 2.9), поперечное сечение которых может быть аппроксимировано эллипсом; причем большая ось одного эллипса перпендикулярна подстилающей поверхности («вертикальный луч»), а другого- составляет с ней угол 45* («наклонный луч»). Поперечное сечение общей диаграммы направленности антенны напоминает букву V , что и дает название методу.

Рис. 2.9 Поперечное сечение ДНА при использовании метода V- луча.
При вращении антенной системы каждая цель облучается дважды – сначала вертикальным, а затем наклонным лучом. Промежу-
СТР 25
---------------------------------------------------------------------------------------------------------------------
ток
времени между первым и вторым облучателями
зависит от угла места цели. Чем больше
![]() (высота полета цели), тем на больший угол
по азимуту должна повернуться антенная
система, чтобы цель, облученная
вертикальным лучом, была вторично
облучена наклонным лучом. Достоинством
рассмотренного метода является
возможность определения трех координат
цели при достаточно большой скорости
обзора зоны обнаружения. Принцип
измерения высоты полета цели методом
V-луча
будет подробнее рассмотрен ниже.
(высота полета цели), тем на больший угол
по азимуту должна повернуться антенная
система, чтобы цель, облученная
вертикальным лучом, была вторично
облучена наклонным лучом. Достоинством
рассмотренного метода является
возможность определения трех координат
цели при достаточно большой скорости
обзора зоны обнаружения. Принцип
измерения высоты полета цели методом
V-луча
будет подробнее рассмотрен ниже.
-
Метод парциальных диаграмм.
Одновременный обзор заданного угломестного сектора обеспечивается тем, что антенна РЛС формирует на прием в вертикальной плоскости набор смещенного перекрывающихся друг с другом узких парциальных диаграмм (см. рис. 2.4,б; 2.5,б,г). Такая парциальная ДН может быть сформирована следующими способами:
а) с помощью зеркальной антенны с набором смещенных друг относительно друга по вертикали облучателей. Каждому лепестку соответствует свой приемный канал;
б) использованием частотно-зависимых антенн. При этом каждый луч формируется на своей частоте (происходит частотная «окраска» зоны обнаружения в угломестной плоскости);
в) за счет использования РЛС с ФАР диаграммообразующей системы.
На излучение формируется либо один широкий луч косекансной формы (см. рис. 2.4,б; 2.5,б – пунктирная линия) как это реализовано в РЛС 55Ж6, 22Ж6, либо набор лучей, перекрывающих заданный угломестный сектор (рис. 2.5,г) (реализовано в РЛС 19Ж6).
-
Метод частотного сканирования луча.
Для обеспечения частотного сканирования луча в угломестной плоскости (реализовано в РЛС 5Н69) применяются зондирующий ЛЧМ сигнал и антенна с углочастотной чувствительностью. На излучение и прием используется одна антенна.
На
излучение формируется один узкий луч
в обеих плоскостях (см. рис. 2.4,а), положение
которого по углу места определяется
частотой подведенных к антенне колебаний.
В течение длительности импульса
![]() передатчика частота
передатчика частота
СТР 26
---------------------------------------------------------------------------------------------------------------------
изменяется
от
![]() до
до
![]() ,
а луч ДНА последовательно перемещается
по углу места в пределах сектора
сканирования от
,
а луч ДНА последовательно перемещается
по углу места в пределах сектора
сканирования от
![]() …
…![]() .
В результате сканирования луча цель,
находящаяся под некоторым фиксированным
углом места
.
В результате сканирования луча цель,
находящаяся под некоторым фиксированным
углом места
![]() ,
облучается лишь частью зондирующего
сигнала. Отраженный сигнал представляет
собой «вырезку» из зондирующего. Его
длительность
,
облучается лишь частью зондирующего
сигнала. Отраженный сигнал представляет
собой «вырезку» из зондирующего. Его
длительность
![]() определяется шириной ДНА по углу места
определяется шириной ДНА по углу места
![]() и скоростью сканирования
и скоростью сканирования
![]() .
.
 ,
,
а девиация частоты парциального ЛЧМ эхо-сигнала (рис. 2.10)
![]()
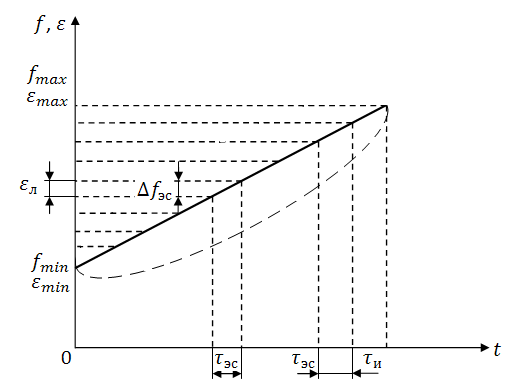
Рис 2.10 К пояснению принципа частотного сканирования луча ДНА в угломестной плоскости.
Особенностью
работы на прием антенны с частотным
сканированием по сравнению с антенной
с механическим сканированием является
то, что она остается неподвижной в
плоскости сканирования луча и способна
принимать сигналы одновременно с любого
угломестного направления на соответствующей
этому направлению частоте
![]() и при любом из запаздывании.
и при любом из запаздывании.
При использовании остронаправленной антенны с механическим сканированием переместить луч в новое угломестное направление (путем качания антенны, как в ПРВ) можно лишь после того,
СТР 27
---------------------------------------------------------------------------------------------------------------------
как будет принят эхо-сигнал от самой удаленной цели, то в антенне с частотным сканированием луч может перемещаться в новое направление, не дожидаясь прихода эхо-сигналов с предыдущего сигнала, а затем в течение периода повторения до следующего зондирующего сигнала антенна принимает эхо-сигналы от целей со всех угломестных направлений в пределах сектора сканирования. Таким образом, сканирование ДНА производится лишь на передачу зондирующих сигналов, а на прием антенна формирует набор парциальных лучей, направлению максимума каждого луча соответствует своя частота сигнала. Количество приемных устройств РЛС должно соответствовать числу лучей парциальных ДНА.
Достоинством РЛС с частотным сканированием является возможность адаптации обзора в соответствии со складывающейся воздушной и помеховой обстановкой путем изменения параметром зондирующих сигналов. Так выбором достаточно длинного сигнала с определенной средней частотой и малой девиацией частоты можно производить длительное зондирование определенных угломестных направлений, обеспечивая тем самым, обнаружение сигналов в шумовых помехах повышенной интенсивности.
Кроме того, если использовать не ЛЧМ-сигнал, а зондирующий сигнал с нелинейной частотной зависимостью (см. рис. 2.10 штриховая линия), то изодальностную часть зоны обнаружения облучается сигналами большой длительности, а изовысотная часть импульсами малой длительности. Указанная мера обеспечивает рациональное распределение энергии в угломестной плоскости и повышает помехозащищенность от активных шумовых помех в изодальностной части зоны обнаружения.
Недостатком РЛС с частотным сканированием является невозможность перестройки несущей частоты зондирующих сигналов для защиты от прицельных активных помех, а также эффекта сжатия ЛЧМ-сигнала при обработке в приемном устройстве.
СТР 28
---------------------------------------------------------------------------------------------------------------------