

10.2. Выбор датчика уровня
В качестве датчика уровня выбираем ультразвуковой уровнемер типа У – 25С.

Рис. 10.3. Ультразвуковой уровнемер типа У – 25С
Уровнемер У-25С предназначен для бесконтактного непрерывного автоматического измерения уровня и температуры агрессивных, вязких, жидких, неоднородных, сыпучих, кусковых и других материалов в резервуарах. Уровнемер У-25С БКГН.422225.000 - уровнемер для сыпучих материалов, конструктивно отличается отсутствием защитного покрытия на пленке излучателя датчика уровня УДУ-25С. Контроль уровня производится путем измерения времени прохождения ультразвукового зондирующего импульса от акустического преобразователя до границы раздела с контролируемой средой и обратно. Для увеличения точности измерения уровня и контроля температуры измеряемой среды уровнемер может комплектоваться с датчиками температуры ДТ-125 с коробками клеммными СК1-2-12 от 1 до 7 штук или термоподвесом ТП-125 и коробками клеммными СК1-2-17. Блок гальванической развязки БГР-16 может входить в комплект поставки уровнемера, если необходимо получить дополнительно до двух токовых каналов и (или) до четырех ключей (выходов типа ОК) или подключить уровнемер в сеть контроллеров.
Технические
характеристики:
-
Пределы измерения уровня, 0,2 - 20 м;
-
Предел допускаемой основной абсолютной погрешности при измерении уровня 1, мм:
-
±15 в диапазоне (0,2-5) м;
-
±50 в диапазоне (5,0-20) м;
-
Предел допускаемой вариации выходного сигнала 0,5;
-
Порог чувствительности, 1 мм;
-
Пределы измерения температуры, (внутренним датчиком температуры) 30...+85 °С;
-
Пределы измерения температуры, (внешними датчиками температуры или термоподвесом) 55...+125 °С;
-
Ширина диаграммы направленности излучателя, град 20 ± 2;
-
Напряжение питания датчика уровня У-25С, 24 В;
Потребляемая
мощность датчика уровня У-25С, Вт 3 (5 - при
включенном подогреве излучателя).
10.3. Выбор исполнительного механизма
В качестве исполнительного механизма поворотной задвижки выбираем механизм однооборотный МЭО-10000/160-0,63к-84.

Рис. 10.4. Исполнительный механизм МЭО-10000/160-0,63к-84
Состав механизма:
-
электродвигатель АИС-71В4;
-
тормоз механический;
-
редуктор;
-
ручной привод;
-
блок сигнализации положения или реостатный, или индуктивный, или токовый;
-
рычаг.
Управление механизмом: контактное или бесконтактное. Тип управляющего устройства при бесконтактном управлении: пускатель ПБР-3А или усилитель ФЦ-0610.
Основные параметры:
-
Потребляемая мощность: 900Вт;
-
Тип двигателя и управляющего устройства: АИC-71В4;
-
Габаритные размеры, мм: 990*725*675;
-
Масса, кг: 580;
-
Номинальный крутящий момент на выходном валу, Н*м: 10000;
-
Номинальное время полного хода выходного вала, с: 160;
-
Номинальный полный ход выходного вала, об: 0.63;
-
Напряжение питания при частоте 50 Гц, В: 220/380.
11. Расчет и построение переходной характеристики «датчик – объект управления»
Работа датчика характеризуется обыкновенным неоднородным дифференциальным уравнением первого порядка:

По аналогии с пунктом 4 курсового проекта определяем передаточную функцию датчика:

Передаточная функция ОУ имеет вид:

Структурная схема соединения ОУ и датчика имеет вид:








Рис. 11.1. Структурная схема соединения ОУ и датчика
Определяем общую переходную функцию датчик – ОУ:

По аналогии с
пунктом 4.1 курсового проекта определяем
переходную характеристику:
Подставив заданные значения kоу, kд, Тоу, Тд и получим график переходной характеристики «датчик – ОУ»:
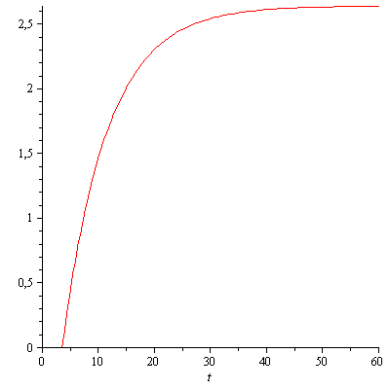
Рис. 11.2. График переходной характеристики датчик – ОУ