8. Построение и описание схем автоматизации функциональной и структурной оу по заданному каналу регулирования
Построим функциональную схему локальной САР ОУ для заданного канала регулирования «стабилизация мощности, потребляемой электроприводом дробилки КМД, изменением угла поворота поворотной задвижки с учетом уровня материала в загрузочной воронке КМД»:
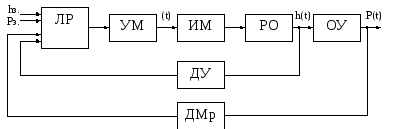
Рис. 8.1. Функциональная схема локальной САР по заданному каналу регулирования
Функциональная схема САР содержит:
-
ЛР – специализированный контроллер;
-
УМ – усилитель мощности;
-
ИМ – исполнительный механизм, предназначенный для вращения поворотной задвижки;
-
РО – рабочий орган (поворотная задвижка);
-
ОУ – конусная дробилка мелкого дробления;
-
ДУ – ультразвуковой датчик уровня;
-
ДМр – датчик мощности.
Датчики уровня ДУ и мощности ДМр подключены к соответствующим аналоговым входам контролера ЛР. При этом все сигналы от датчиков, поступающие на аналоговые входы контроллера, преобразуются в цифровые. К выходу контролера ЛР через усилитель мощности, подключен исполнительный механизм поворотной задвижки. Функциональные элементы на рис. 8.1. соответствуют тем же элементам блок-схеме автоматизации ДСЛ, показанной на листе 1.
В функциональной схеме САР (рис. 8.1) применяется двухконтурное регулирование по отклонению, внутренний контур с учетом датчика ДУ и внешний контур с учетом датчика ДМр.
Внешний контур предназначен для регулирования мощности привода дробилки P(t) путем изменения угла поворота поворотной задвижки (t). Внутренний контур предназначен для регулирования уровня исходного материала h(t) в загрузочной воронке дробилки путем введения коррекции на изменение угла поворота поворотной задвижки (t) по внешнему контуру.
Для данного канала регулирования, с учетом относительно малой инерционности, применяем ПИ–регулятор, что позволит осуществлять управление без статической ошибки.
По внешнему контуру в контроллере ЛР с учетом номинальной мощности привода дробилки и данных от датчика мощности ДМр, определяется уставка, то есть формируется задание для ПИ–регулятора Pз., для поддержания требуемой мощности дробилки. По внутреннему контуру в контроллере ЛР с учетом максимального уровня материала в загрузочной воронке и данных от датчика уровня ДУ, осуществляется коррекция задания для ПИ–регулятора hз., так чтобы поддерживать требуемый уровень исходного материала в загрузочной воронке дробилки.
9. Структурный анализ локальной сар на основе выбранного закона регулирования и выбор специализированного контроллера
9.1 Построение функциональной схемы
Построим функциональную схему локальной САР ОУ для заданного канала регулирования «стабилизация мощности, потребляемой электроприводом дробилки КМД, изменением угла поворота поворотной задвижки с учетом уровня материала в загрузочной воронке КМД» с учетом заданного закона регулирования (ПИ – регулятора):

Рис. 9.1. Структурная схема локальной САР по заданному каналу регулирования
где РУ – регулирующее устройство; Рз. – задание по мощности привода дробилки; hз. – задание по уровню исходного материала в загрузочной воронке дробилки; *(t) – угол поворота поворотной задвижки с учетом регулирования по мощности привода дробилки; (t) – угол поворота поворотной задвижки с учетом коррекции по уровню исходного материала в загрузочной воронке дробилки; h(t) – уровень исходного материала в загрузочной воронке дробилки; Р(t) – мощность привода дробилки.
Элементы
на структурной схеме (рис. 9.1.) соответствуют
следующим элементам на функциональной
схеме (рис. 8.1.), а именно
 соответствует ПИ
– регулятору в специализированном
контроллере ЛР;
соответствует ПИ
– регулятору в специализированном
контроллере ЛР;
 – УМ;
– УМ;
 – ИМ;
– ИМ;
 – РО;
– РО;
 – ДУ;
– ДУ;
 – ДМр;
– ДМр;
 – ОУ.
– ОУ.
Так как постоянная времени датчика уровня очень мала (порядка 0.01), можем считать что переходная характеристика датчика уровня имеет вид усилительного звена kду. Учитывая это и то, что TоуTим, можем сказать что, обратная отрицательная связь, которая образуется с помощью датчика уровня ДУ, компенсирует постоянную времени ИМ. Следовательно можем представить схему в виде:
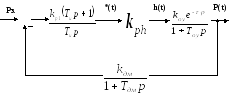
Рис. 9.2. Структурная схема локальной САР по заданному каналу регулирования
где kph – передаточная функция контура регулировки по уровню.
Представим ПИ – закон регулирования в цифровой форме, он имеет вид:
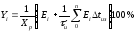
где Yi – выходной сигнал; Xp – полоса пропорциональности; Ei – величина отклонения; и – постоянная времени интегрирования; tиз – время между двумя измерениями; Еitиз – сумма рассогласования.
Если ИМ связан с РО и имеет датчик положения, то можно воспользоваться этой формулой, а если в структуре отсутствует датчик положения, тогда регулятор вычисляет среднюю скорость поворота задвижки по следующей формуле: