12. Расчет параметров настройки регулятора с учетом их определения по динамическим характеристикам
Расчет настроек регуляторов энергоустановок предусматривает
определение
численных значений параметров настройки,
при которых переходные процессы в (САР)
удовлетворяют заданным показателям
качества. В регуляторах предусматриваются
специальные органы настройки, с помощью
которых можно в определенных пределах
менять числовые значения параметров
настройки. Таким образом, один и тот же
регулятор может быть «приспособлен»
для работы на объектах, имеющих различные
регулировочные свойства. Перед установкой
на объекте управления и в процессе
эксплуатации САР необходимо производить
расчет оптимальной настройки регулятора,
при которой система, будучи в достаточной
мере устойчивой, удовлетворяет принятым
показателям качества переходного
процесса. Параметрами настройки являются
коэффициенты уравнения, определяющего
закон регулирования.
Существуют следующие методы настроек регулятора:
-
Расчётные по динамическим характеристикам объекта;
-
Организованного поиска оптимальных настроек на объекте (итерационные и алгоритмические);
-
Моделирование на ПК.
Из расчетных по динамическим характеристикам объекта наибольшее распространение получил упрощенный инженерный, основанный на аппроксимации управляемого объекта апериодическим звеном.
Для нашего процесса регулирования (апериодического) параметрами настройки являются: kp – коэффициент передачи регулятора; Tи – время интегрирования, которые находят по формулам:


Подставив данные kоу, Тоу, , в соответствии с заданием получим:


Передаточная функция ПИ – регулятора с учетом полученных значений имеет вид:
13. Построение и описание рксу эд с учётом выбранных элементов
Рассмотрим привод конвейера-питателя. Непрерывный, однонаправленный характер работы конвейера определяет длительный режим работы его электропривода, который выполняется нереверсивным. К электроприводам механизмов конвейеров с непрерывным режимом работы предъявляются требования по обеспечению плавности пуска и торможения. Это требование обусловлено наличием больших масс поступательно движущихся элементов и значительной податливостью транспортной ленты. Большая маховая масса установки увеличивают возможность пробуксовывания приводных барабанов и шкивов относительно ленты при пуске. Резкое приложение момента при наличии упругих механических связей вызывает механические колебания при пуске, в результате чего в ленте возникают дополнительные динамические усилия. Наиболее распространённым типом электропривода механизмов непрерывной транспортировки является регулируемый привод переменного тока на основе асинхронного двигателя с фазным ротором.
На рисунке 13.1
изображен электропривод с асинхронным
двигателем, имеющим контактные кольца,
и принципиальная схема релейно-контакторной
системы управления (РКСУ).
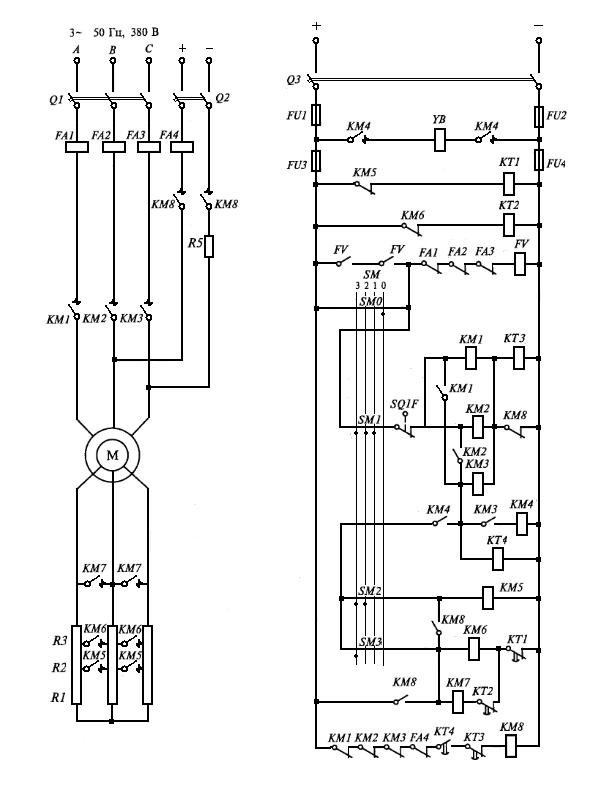
Рис. 13.1. РКСУ ЭД
Такой электропривод
может использоваться в различных
промышленных установках, в частности
в конвейерах. Электропривод снабжается
механическим тормозом для надёжного
удержания рабочего органа в неподвижном
состоянии при отключённом от сети
двигателе. Наличие резисторов R1-R3
в роторной цепи позволяет осуществлять
реостатные пуск, торможение и регулирование
скорости. Цепь постоянного тока, питающая
обмотку статора через контактор КМ8, обеспечивает режим динамического торможения. Силовая цепь имеет максимальную защиту, выполненную на реле FA1-FA4.
Цепь управления, питаемая от сети постоянного тока, предусматривает ручное управление с помощью командоаппарата с контактами SM0-SM3. Выделим типовые узлы управления.
Узел управления механическим тормозом включает в себя контактор КМ4 и электромагнит YB, который, преодолевая силу тормозной пружины, оттягивает колодки от шкива тормоза при включённом контакторе КМ4. Так как при нулевом положении командоаппарата контактор КМ4 отключён, то в режиме динамического торможения действует одновременно и механическое торможение. В состоянии покоя электромагнит YB отключён, и механический тормоз удерживает ротор двигателя в неподвижном состоянии.
Узел защиты,
выполненный на реле FV,
осуществляет отключение двигателя с
наложением механического тормоза при
токовых перегрузках, снижении напряжения
в цепи управления и исключает самозапуск
двигателя. К узлу защиты следует отнести
и аварийный выключатель SQ1F,
а так же плавкие предохранители FU1-FU4,
защищающие от коротких замыканий в цепи
управления.
Узел включения-отключения содержит цепи с контактами SM0, SM1 командоаппарата и с контакторами КМ1, КМ2, КМ3.
К узлу пуска, который осуществляется по принципу времени в две ступени, относятся контакты SM2, SM3, реле времени КТ1, КТ2 и контакторы КМ6, КМ7, шунтирующие пусковые резисторы R2 и R3.
Данная система управления имеет один узел торможения. В состав узла динамического торможения входят контакторы КМ5-КМ8 и реле КТ1 и КТ2.
Торможение
начинается после установки командоаппарата
в нулевое положение и протекает, как и
при пуске, по принципу времени в две
ступени. Реле КТ3, включённое последовательно
с контактором КМ1 или КМ2 позволяет
прервать динамическое торможение
переключением командоаппарата из
нулевого положения и осуществить далее
пуск в выбранном направлении.