

4. Анализ динамических свойств оу. Расчет и построение основных динамических характеристик
Работа ОУ по каналу регулирования «стабилизация мощности, потребляемой электроприводом дробилки КМД, изменением угла поворота поворотной задвижки с учетом уровня материала в загрузочной воронке КМД» характеризуется обыкновенным неоднородным дифференциальным уравнением первого порядка:
Анализ динамических свойств ОУ производят по временным и частотным характеристикам.
Преобразуем исходное уравнение по Лапласу:
получаем алгебраическое уравнение изображений:
 ,
,
где, X( p) и Y( p) – выходная и входная величины ОУ, преобразованные по
Лапласу; p – комплексная переменная (оператор Лапласа).
Находим решение алгебраического уравнения изображений:


Определяем передаточную функцию ОУ:
4.1. Переходная характеристика
Для построения
переходной характеристики возьмем
обратное преобразование Лапласа от
выражения
 .
.
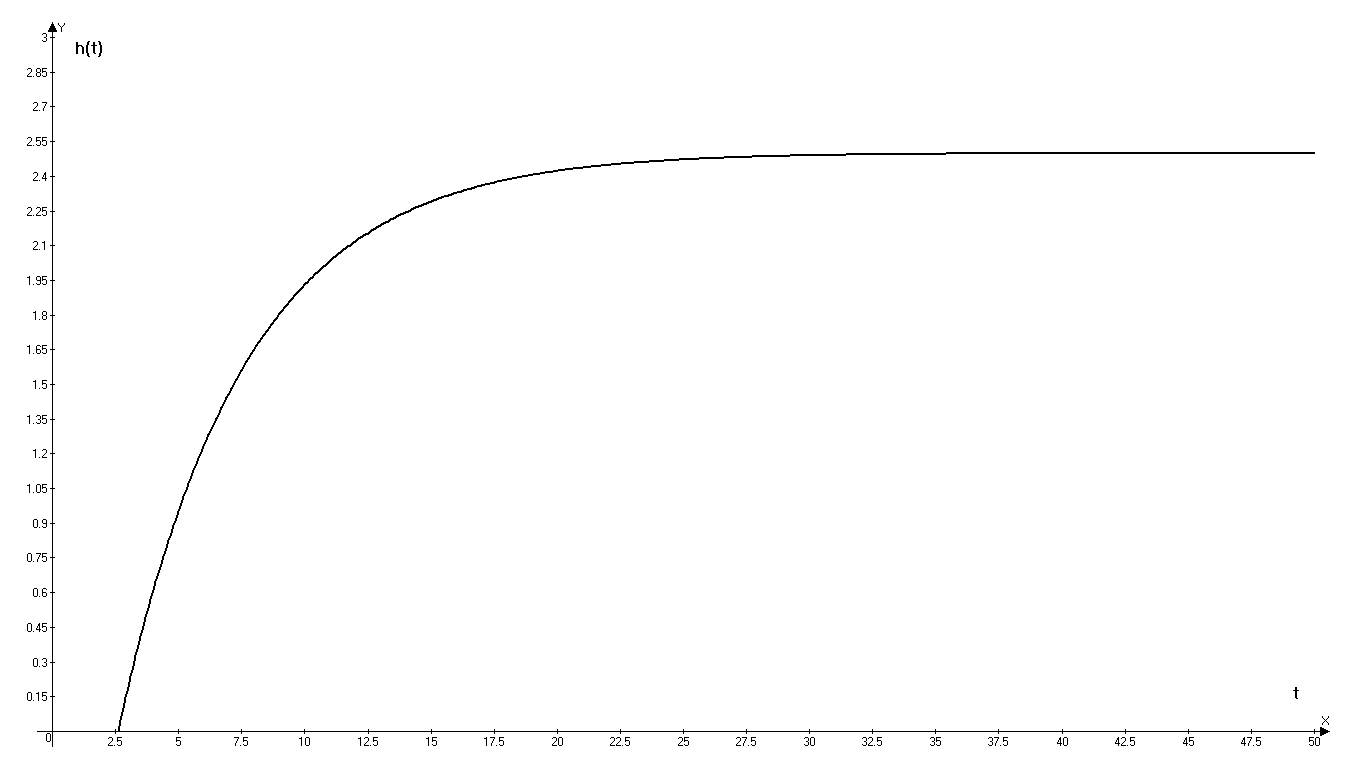
Рис. 4.1. График переходной характеристики ОУ
4.2. Импульсная характеристика
Импульсную характеристику получаем, взяв обратное преобразование Лапласа от передаточной функции.
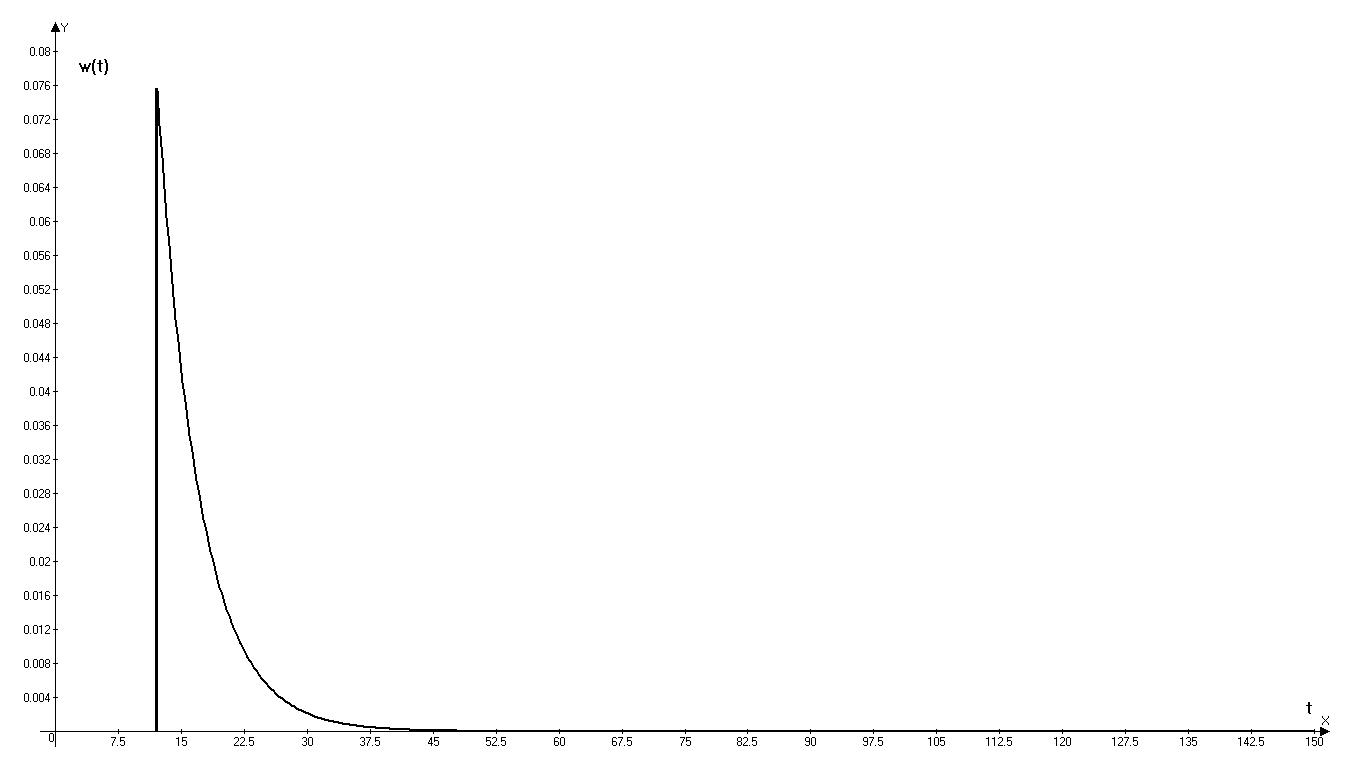
Рис.
4.2. График импульсной характеристики
ОУ
4.3. Комплексно–частотная характеристика (кчх)
Находим аналитическое выражение КЧХ. Для этого заменяем в выражении для передаточной функции комплексную величину р на переменную j и получаем:

Домножим на комплексно – сопряженную величину 1–Тоуj и получим:
 ,
,
после преобразований, получаем
 ,
,
где
 ,
тогда
,
тогда


 – вещественная
частотная характеристика (ВЧХ);
– вещественная
частотная характеристика (ВЧХ);
 – мнимая частотная
характеристика (МЧХ).
– мнимая частотная
характеристика (МЧХ).
Подставив заданные значения kоу, Тоу, получим график КЧХ:
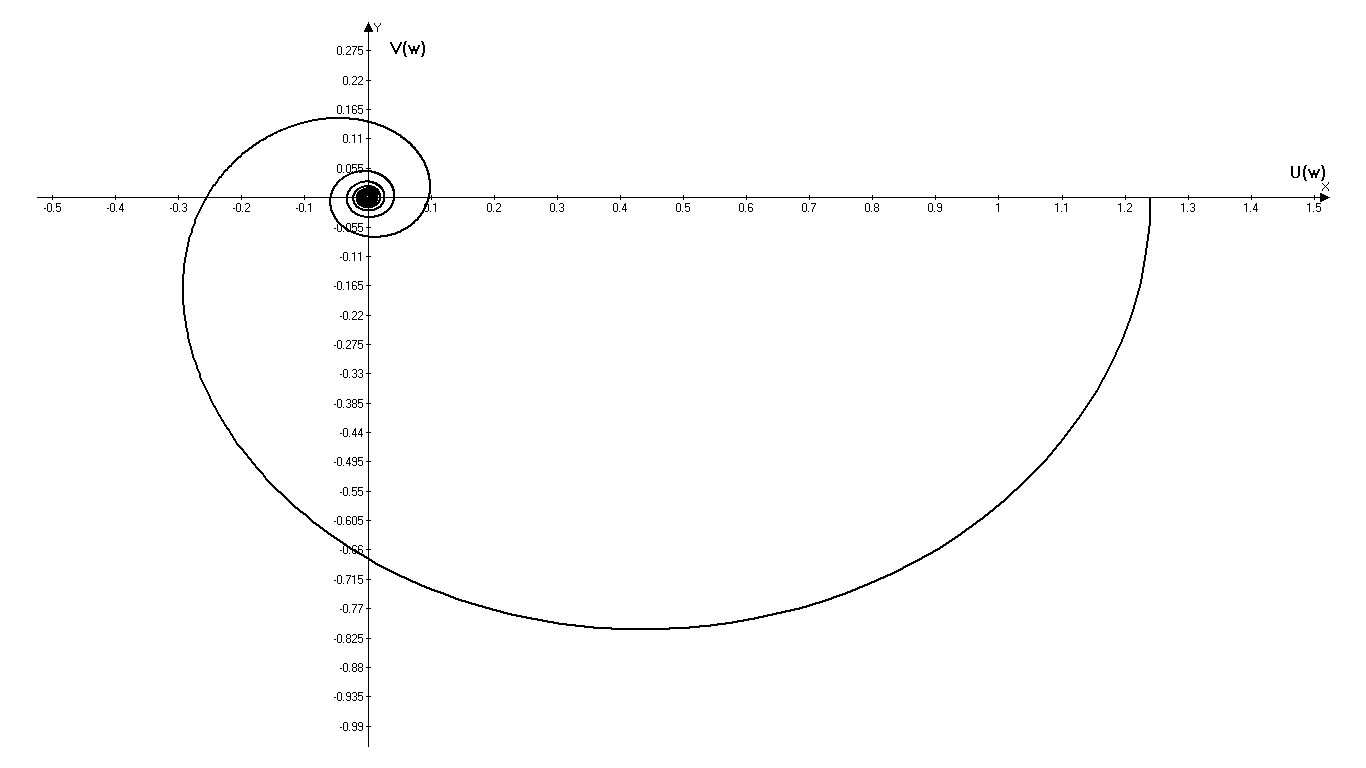
Рис. 4.3. График комплексно–частотной характеристики ОУ
4.4. Амплитудно–частотная характеристика (ачх)
Определим АЧХ нашего ОУ:

После подстановки и преобразования получим:

Подставив заданные
значения kоу,
Тоу
получим график АЧХ:
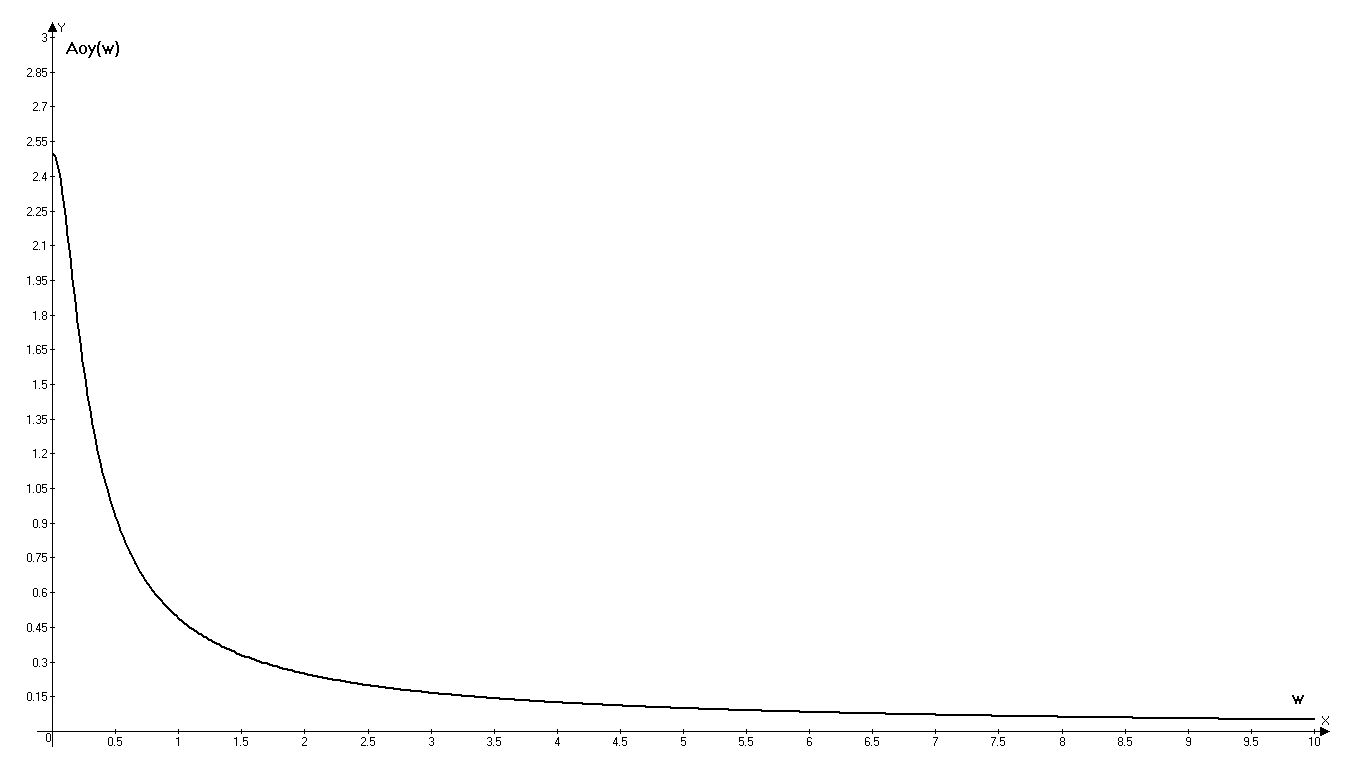
Рис. 4.4. График амплитудно–частотной характеристики ОУ
4.5. Фазо–частотная характеристика (фчх)
Определяем ФЧХ нашего ОУ:

После подстановки и преобразования получим:

Подставив заданные значения Тоу, получим график ФЧХ:
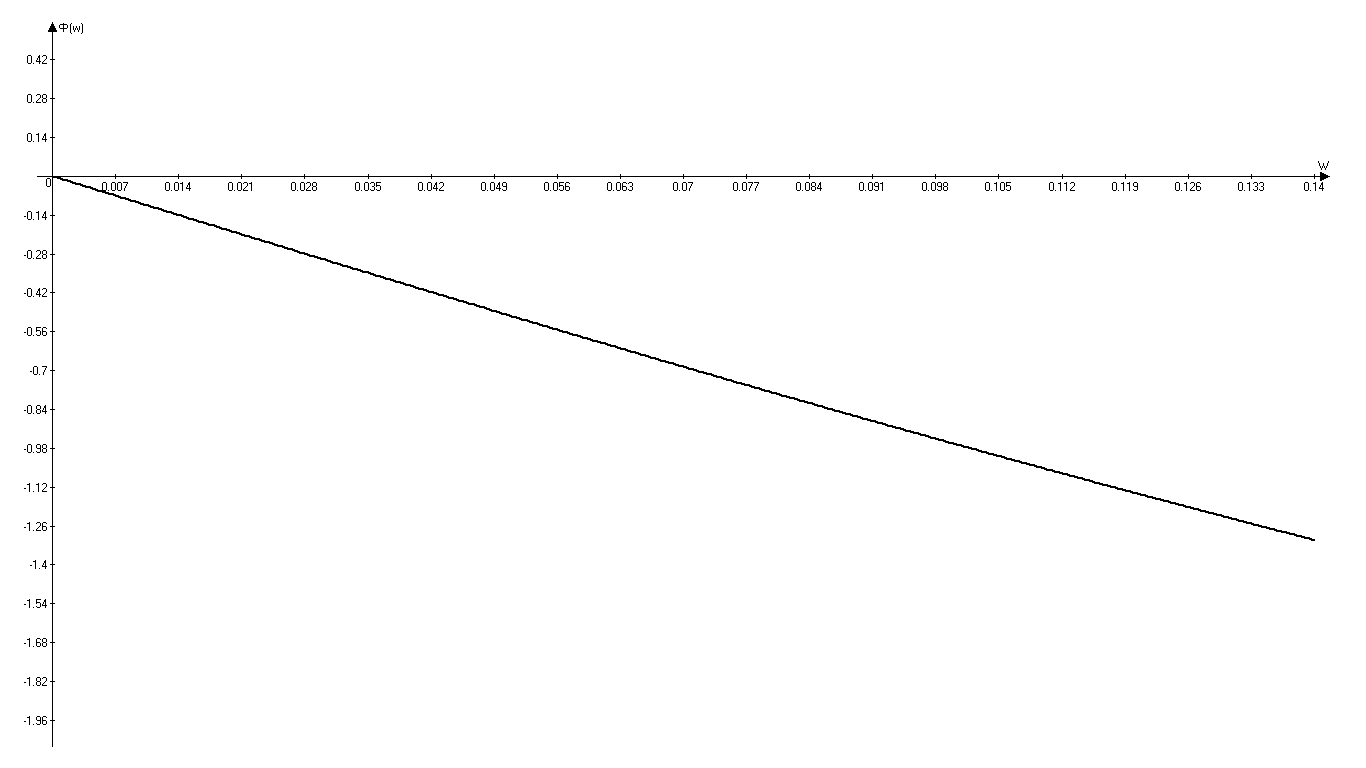
Рис. 4.5. График фазо–частотной характеристики ОУ
Таким образом, для оценки динамических свойств объекта управления располагаем временными и частотными характеристиками. Из временных характеристик следует, что рассматриваемому ОУ характерны инерционность (постоянная времени Тоу) и запаздывание (время запаздывания τ ).
Частотные характеристики свидетельствуют о там, что объект управления является сравнительно низкочастотным, т. е. может реагировать только на относительно медленные изменения регулирующей величины Y(t).
5. Основные принципы построения системы автоматизации процессом дробления
1. Стабилизация расхода исходного материала изменением частоты вращения привода питателя: Q = const; nн = var.
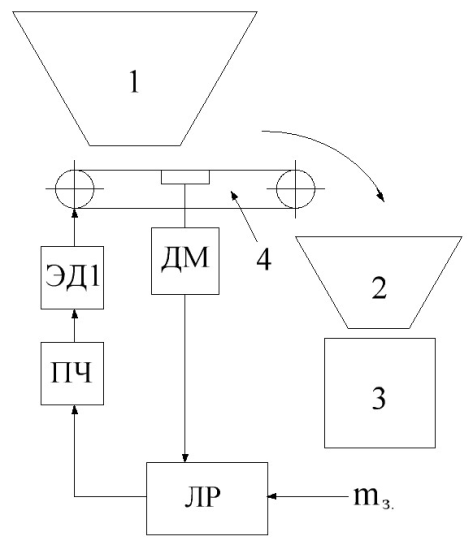
Рис. 5.1. Блок – схема автоматизации ДСЛ
где 1 – бункер питателя; 2 – загрузочная воронка дробилки; 3 – конусная дробилка; 4 – конвейерные весы питателя; ЭД1 – электродвигатель конвейерных весов; ПЧ – преобразователь частоты; ЛР – локальный регулятор; ДМ – датчик массы; mз. – масса задания.
Этот принцип управления применяется в случаях, если колебания физико–механических свойств не велики. Особенности этой системы заключается в применении частотно–регулируемого привода питателя.
2. Стабилизация мощности потребляемой приводом дробилки изменением частоты вращения привода питателя: P = const; nн = var.
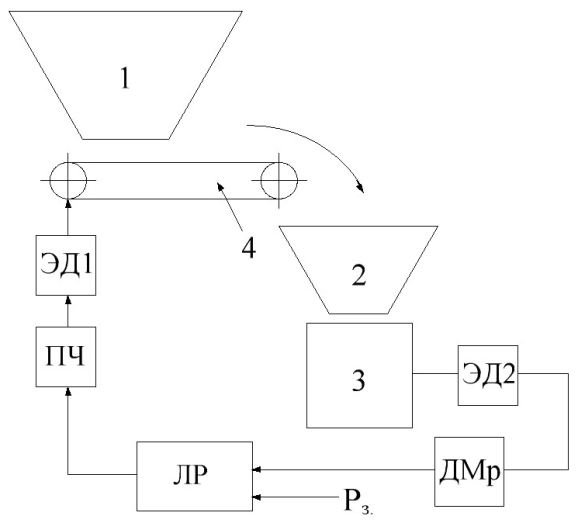
Рис. 5.2. Блок – схема автоматизации ДСЛ
где ЭД2 – электродвигатель дробилки; ДМр – датчик мощности; Рз. – мощность задания.
Данный принцип
управления позволяет ограничить
перегрузку дробилки и предотвращает
выход из строя его электродвигателя.
3. Стабилизация уровня исходного материала в загрузочной воронке дробилки изменением частоты вращения привода питателя: h = const; nн = var.
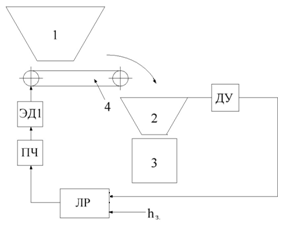
Рис. 5.3. Блок – схема автоматизации ДСЛ
где ДУ – датчик уровня; hз. – уровень задания.
Данный принцип управления не используется как самостоятельный, он используется как корректирующий совместно с первым или со вторым.
4. Стабилизация суммарного сигнала расхода исходного материала и мощности потребляемой приводом дробилки изменением частоты вращения привода питателя: Q = const; P = const; nн = var.
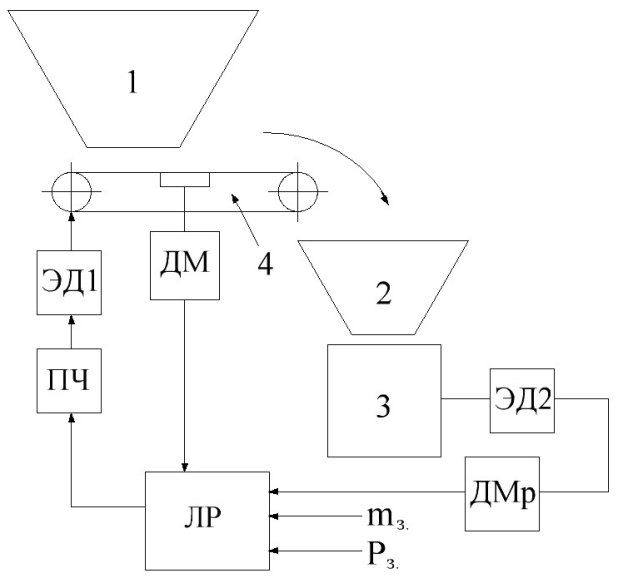
Рис. 5.4. Блок – схема автоматизации ДСЛ
В данном принципе
управления стабилизация расхода
исходного материала является основной,
а стабилизация мощности корректирующей.
5. Стабилизация расхода исходного материала изменением частоты вращения привода питателя с коррекцией по уровню загрузки и по мощности потребляемой электроприводом дробилки: Q = const; nн = var; h = const; P = const.
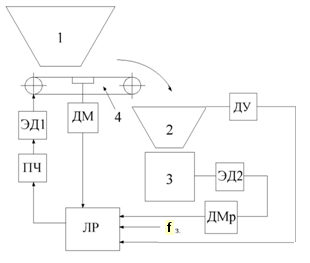
Рис. 5.5. Блок – схема автоматизации ДСЛ
В данном принципе управления требуется минимальная квалификация оператора, т.к. основные функции выполняет локальная САР.