

2. Динамические погрешности средств измерений
Задача 2.1
Задана переходная характеристика линейного измерительного устройства (рис. 2.1). Требуется определить: передаточную функцию устройства; амплитудно- и фазово-частотные характеристики; динамическую погрешность устройства при изменении входного сигнала по закону
![]() .
.
Определение параметров передаточной функции
По виду переходной характеристики (см. рис. 2.1) можно заключить, что исследуемое измерительное устройство является устройством первого порядка и его передаточная функция имеет вид

Рис. 2.1. Сигнал на входе и на выходе исследуемого измерительного стройства:
Xвх(t) – входной сигнал; Xвых(t) – выходной сигнал
На основании методики, изложенной в учебном пособии [1], неизвестные параметры передаточной функции запишутся в виде
![]() ,
,
![]() Т=1,3
с.
Т=1,3
с.
Таким образом,
 .
.
Определение амплитудно- и фазово-частотных характеристик
Искомые характеристики исследуемого измерительного устройства запишутся следующим образом:
![]() ,
,
φ(ω)= - arctgωT = - arctg1,3ω.
Численные значения
![]() и
и
![]() при изменении угловой частоты от
при изменении угловой частоты от
![]() до
до
![]() приведены ниже, а графики зависимостей
приведены ниже, а графики зависимостей
![]() и
и
![]() представлены в табл. 2.1 и на рис. 2.2.
представлены в табл. 2.1 и на рис. 2.2.

Рис 2.2. Амплитудно – и фазово-частотные характеристики
Таблица 2.1. Зависимость амплитуды и фазы от угловой частоты
Ω |
0,00 |
0,30 |
0,50 |
1,00 |
2,00 |
3,00 |
4,00 |
5,00 |
6,00 |
A(ω) |
1,00 |
0,93 |
0,84 |
0,61 |
0,36 |
0,25 |
0,19 |
0,15 |
0,13 |
φ(ω) |
0,00 |
- 25º40’ |
- 38°40’ |
- 58°00 |
- 72°40’ |
- 78°20’ |
- 81°10’ |
- 83°50’ |
- 84°05’ |
Определение погрешности
Динамическая погрешность для входного сигнала запишется в виде
![]() .
.
Воспользуемся рекомендациями, изложенными
в пособии [1], и на их основании определим
закон изменения выходного сигнала. Для
этого найдем изображение по Лапласу
входного сигнала, затем изображение по
Лапласу выходного сигнала
![]() .
.
Изображение входного сигнала:
![]()
![]()
![]() ;
;
 .
.
Изображение выходного сигнала
![]() ,
,
где
![]() – изображение по Лапласу выходного
сигнала;
– изображение по Лапласу выходного
сигнала;
![]() – передаточная функция измерительного
устройства, используемого для измерения
входного сигнала.
– передаточная функция измерительного
устройства, используемого для измерения
входного сигнала.
Отметим, что передаточная функция уже найдена выше и определяется соотношением
![]()
Изображение выходного сигнала с учетом
![]() и
и
![]() имеет
вид
имеет
вид

После деления числителя и знаменателя
на 1,3 и приведения значения
![]() к табличному виду получим
к табличному виду получим

По таблицам преобразования Лапласа (см. [16]) оригинал выходного сигнала по его изображению запишется в виде
![]() .
.
Динамическая погрешность рассматриваемого средства измерения с учетом найденного выходного сигнала запишется в виде
![]() .
.
График, иллюстрирующий изменение динамической погрешности во времени, представлен на рис 2.2.
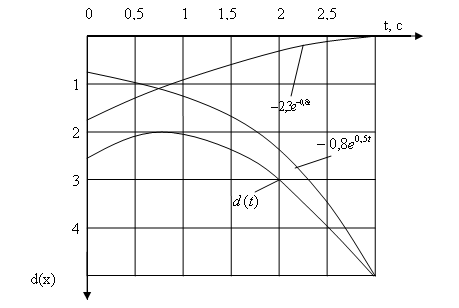
Рис. 2.2. Динамическая погрешность d(t) апериодического средства измерения первого порядка при экспоненциальном изменении входного сигнала
Таким образом, на основании проведенных расчетов можно заключить, что исследованное измерительное устройство пригодно для измерений постоянных во времени или медленно изменяющихся сигналов. При измерении переменных во времени сигналов, изменяющихся с частотами более 0,1 Гц, появляются значительные динамические погрешности, а при измерении экспоненциально возрастающих сигналов появляются увеличивающиеся с течением времени динамические погрешности, как показано на рис. 2.2.