

Конспект лекций по ТАУ
.pdfПри анализе ЛАЧХ разомкнутой системы ось абсцисс разбивается на три части: область низких (НЧ), средних (СЧ) и высоких частот (ВЧ). Границами областей служат частоты ωa , где
L(ω) = 30 дБ, и ωn , где L(ω) = –16 дБ (рис. 4.25).
L(ω) |
НЧ |
СЧ |
ВЧ |
|
≈ 30 дБ
ωa |
ωс |
≈ 16 дБ ωn |
Рис. 4.25. Области ЛАЧХ разомкнутой системы
Область НЧ определяет собой ширину спектра частот управляющего воздействия, который может воспроизводиться на выходе данной замкнутой системы без искажений.
Область СЧ определяет запас устойчивости и имеет главное значение для оценки качества переходного процесса. Величиной частоты среза определяется скорость затухания переходного процесса: чем больше ωс, тем короче переходный процесс. Увеличение отрицательного наклона характеристики около ωс свыше –20 дБ/дек может привести к увеличению колебательности системы.
Область ВЧ не оказывает существенного влияния на работу системы.
Для увеличения частоты среза ωс следует повышать коэффи-
191

циент усиления разомкнутой системы. Однако чем больше ωс, тем меньше запас устойчивости по амплитуде и по фазе (это характерно для инерционных звеньев, где с ростом частоты растет запаздывание по фазе).
Избежать нежелательных эффектов можно при включении последовательно дифференцирующего элемента, вносящего опережение по фазе в окрестности ωс, либо при включении последовательно интегрирующего элемента, который повышает усиление, не меняя частоту среза.
Коррекция с помощью дифференцирующего устройства
Дифференцирующая фазоопережающая цепь описывается передаточной функцией (где k < 1):
W (s) = k |
T1s + 1 |
, |
|
W ( jω) = k |
T1 jω + 1 |
. |
||
|
|
|||||||
|
T s + 1 |
|
|
|
|
T jω +1 |
||
2 |
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
||
|
A(ω) = k |
1+ T 2 |
ω2 |
|||||
|
1 |
|
. |
|
|
|||
|
|
|
|
|
|
|||
|
|
|
1+ T 2 |
ω2 |
||||
|
|
|
2 |
|
|
|
|
|
L(ω) = 20 lg( A(ω)) = 20 lg k + 20 lg 
 1+ T12ω2 − 20 lg
1+ T12ω2 − 20 lg 
 1+ T22ω2 .
1+ T22ω2 .
При ω = 0:
L(ω) ≈ 20 lg k.
При ω = ∞:
L(ω) ≈ 20 lg 
 1+ T12ω2 − 20 lg
1+ T12ω2 − 20 lg 
 1+ T22ω2 = 0.
1+ T22ω2 = 0.
ϕ(ω) = arg(W ( jω)) = arctg(ωT1 )− arctg(ωT2 ) = ψ1 − ψ2. .
Таким образом, числитель ПФ обеспечивает опережение, равное ψ1, а знаменатель – запаздывание, равное ψ2.
192
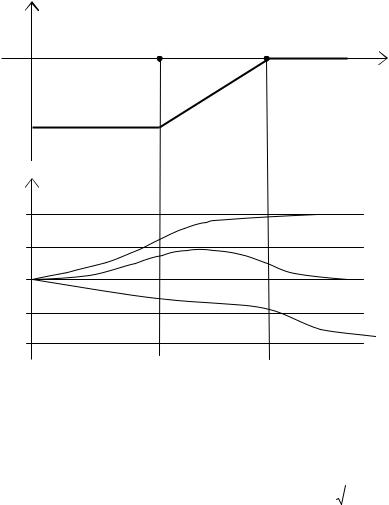
На рис. 4.26 представлены ЛАЧХ и ЛФЧХ фазоопережающей цепи.
L(ω) |
|
|
0 |
ω = 1/T1 |
ω = 1/T2 |
ω
20lgk
π/2 ψ1
π/4
ψ1 - ψ2
0
– π/4
ψ2
– π/2
Рис. 4.26. ЛАХ фазоопережающей цепи
Частоту, на которой происходит максимальное опережение по фазе, можно определить из условия:
dϕ(ω) |
= |
d (arctg(ωT1 )) |
− |
d (arctg(ωT2 )) |
= 0 ωmax = |
1 |
|
. |
|
dω |
dω |
dω |
|
|
|
||||
|
|||||||||
|
|
|
T1T2 |
||||||
Максимальное значение для угла опережения можно найти, подставив ωmax в формулу:
193
|
|
|
T |
|
|
|
|
T |
|
|
|
ϕmax |
(ω) = arctg |
1 |
|
|
− arctg |
2 |
|
. |
|||
T |
T |
||||||||||
|
|
|
|
|
|
|
|||||
|
|
2 |
|
|
|
1 |
|
|
|||
Коррекция с помощью фазоопережающей цепи имеет следующие недостатки:
1.фазоопережающее устройство вносит ослабление
вобласти НЧ, поэтому требуется дополнительно увеличивать коэффициент усиления других элементов;
2.фазоопережающее устройство пропускает ВЧ без ослабления, т.е. высокочастотные шумы проходят на выход без ослабления.
Коррекция с помощью интегро-дифференцирующей цепи
Рассмотрим пассивную интегрирующую цепь, которая описывается с помощью ПФ вида
W (s) = |
T2 s + 1 |
, |
|
|
W ( jω) = |
T2 jω + 1 |
. |
||
|
|
|
|
||||||
|
T s + 1 |
|
|
|
|
|
T jω + 1 |
||
1 |
|
|
|
|
1 |
|
|||
|
|
|
|
|
|
|
|||
|
A(ω) = |
1 + T 2 |
ω2 |
||||||
|
|
|
2 |
|
. |
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
1 |
+ T 2 |
ω2 |
||||
|
|
|
|
|
1 |
|
|
|
|
L(ω) = 20 lg( A(ω)) = 20 lg 
 1+ T22ω2 − 20 lg
1+ T22ω2 − 20 lg 
 1+ T12ω2 .
1+ T12ω2 .
При ω = 0:
L(ω) ≈ 0.
При ω = ∞:
A(ω) → k = T2 ,
T1
194
L(ω) ≈ 20 lg k ,
ϕ(ω) = arg(W ( jω)) = arctg(ωT2 )− arctg(ωT1 ) = ψ1 − ψ2.
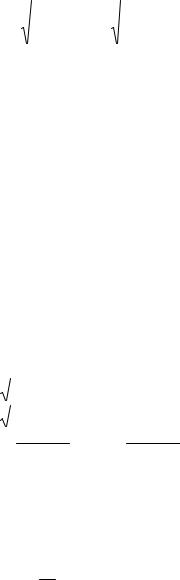
На рис. 4.27 представлены ЛАЧХ и ЛФЧХ интегрирующего устройства.
L(ω) |
|
|
0 |
ω = 1/T1 |
ω = 1/T2 |
ω
20lgk
φ(ω
0
ω
–π/4
–π/2
Рис. 4.27. ЛАХ интегрирующего устройства
Таким образом, интегрирующая цепь не вносит ослабления в области НЧ, но вызывает запаздывание по фазе.
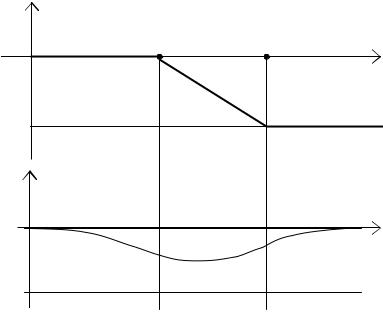
Совместить достоинства дифференцирующего и интегрирующего устройств можно с помощью интегродифференцирующей цепи, которой соответствует ПФ вида
195
W (s) = (τ1s + 1)(τ2 s + 1)
(T1s + 1)(T2 s +1)
и график ЛАХ, приведенный на рис. 4.28.
L(ω) 0
20lgk
φ(ω
π/2 0
– π/2
Рис. 4.28.
ω1 = 1/T1 ω2 = 1/τ1 ω3 = 1/τ2 ω = 1/T2
ω
ω
ЛАХ интегро-дифференцирующего устройства.
Синтез корректирующего звена общего вида
Пусть задана исходная (располагаемая) динамическая система, описываемая ПФ W(s) (рис. 4.29, a). Если эта система является неустойчивой или не удовлетворяет заданным показателям качества, то ее поведение можно улучшить при включении по-
196
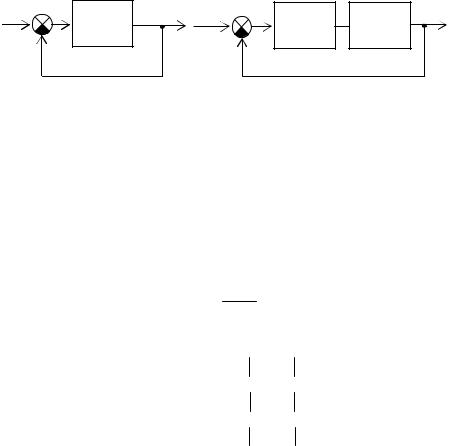
следовательного корректирующего устройства с ПФ K(s) (рис. 4.29, б).
a) |
б) |
X(s) |
Y(s) |
X(s) |
K(s) |
Y(s |
|
W(s) |
|
W(s) |
|
|
Рис. 4.29. Исходная и скорректированная система |
|||
Частотный метод синтеза основан на построении реальных и желаемых частотных характеристик системы, их сопоставлении и выборе на этой основе структуры и параметров корректирующих устройств.
Важнейшим этапом частотного синтеза является формирование желаемой АЧХ системы G(s), которую можно представить в виде произведения
G(s) = W (s)K (s). |
(4.1) |
Откуда следует
K (s) = G(s) .
W (s)
При использовании ЛАЧХ имеем
LK = 20 lg K ( jω) ,
LG = 20 lg G( jω) ,
LW = 20 lgW ( jω) .
Откуда следует
LK = LG − LW .
Рассмотрим требования к G(s).
197
Низкочастотная часть ЛАЧХ формируется в соответствии с требованиями к точности, которую можно оценить по воспроизведению системой гармонического входного сигнала.
Пусть на вход системы поступает сигнал вида
g(t) = gm sin(ωk t) .
Тогда, как было показано выше, ЛАХ системы в области низких частот должна быть расположена не ниже контрольной точки Ak с координатами
|
|
|
|
|
|
gmax |
|
||
ωk = ωg ; |
L(ωk ) = 20lg |
|
|
, |
|
||||
|
xmax |
|
||
где x max − максимальная ошибка следящей системы. Среднечастотная часть ЛАХ должна пересекать ось
частот с наклоном –20 дБ/дек, причем этот отрезок ЛАХ обычно ограничивается с левой стороны отрезком с наклоном –40 дБ/дек, а с правой –40 или –60 дБ/дек, в зависимости от наклона ЛАХ нескорректированной системы.
Для нахождения частоты и амплитуды эквивалентного гармонического воздействия можно воспользоваться требуемыми значениями максимальной скорости и ускорения системы
|
gm |
|
|
(gm ) |
||
ωk = |
&& |
; |
gm = |
& |
2 |
. |
& |
&& |
|||||
|
gm |
|
|
gm |
|
|
Для определения границ среднечастотного участка вводится понятие базовой частоты
198

|
&& |
|
ω0 = |
gm |
. |
|
||
|
xmax |
|
По базовой частоте вычисляется частота среза
ω |
= |
M |
ω |
, |
|
||||
с |
|
M −1 0 |
|
|
где М – заданный показатель колебательности.
По частоте среза определяются частоты ω2, ω3, соот-
ветствующие началу и концу среднечастотного участка:
ω2 |
£ |
M − 1 |
ωc ; |
ω3 |
³ |
M + 1 |
ωc . |
|
|
||||||
|
|
M |
|
|
M |
||
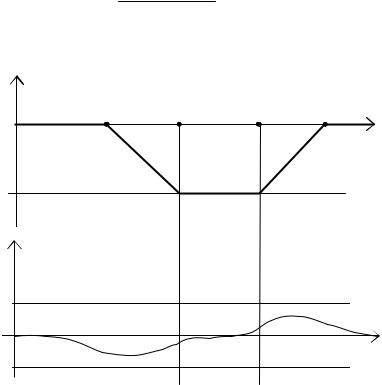
Типовая структура желаемой ЛАЧХ изображена на рис. 4.30.
L(ω) |
|
|
– 20 |
|
|
L(ωk) |
40 |
|
– |
|
|
|
ωc |
ω3 |
ωk |
ω2 ω0 |
ω |
|
|
– 40 |
199

Рис. 4.30. Построение желаемой ЛАЧХ
Высокочастотная часть ЛАЧХ (справа от ω3) не оказывает влияния на точность системы и ее динамические характеристики. Обычно наклоны высокочастотной и низкочастотной частей желаемой ЛАЧХ стремятся сделать такими же, как у исходной динамической системы.
Желаемой ПФ на рис. 4.30 соответствует ПФ вида:
G(s) = |
k(τ |
2 s +1) |
|
|
|
, |
|
s(Tk s + |
|
||
|
1)(T3s +1) |
||
где k − коэффициент усиления; Т и τ − постоянные времени, соответствующие сопрягающим частотам:
τ |
|
= |
1 |
, |
T = |
1 |
, |
T = |
1 |
. |
|
|
|
|
|||||||
|
2 |
|
ω2 |
k |
ωk |
3 |
ω3 |
|||
В общем случае структура ПФ, соответствующей желаемой ЛАХ, будет иметь вид
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
k |
|
|
+ 1 ... |
|
|
|
|
|||
G(s) = |
|
|
|
|
|
|
ω2 |
|
|
|
|
|
, |
|
|
1 |
|
1 |
|
|
|
1 |
|
1 |
|
|
|||
|
s |
s + 1 |
s |
+ 1 |
s + 1 |
s + 1 ... |
|
|||||||
|
|
|
|
|
||||||||||
|
|
ωk |
|
ω3 |
|
|
ω4 |
|
ω5 |
|
|
|||
|
|
|
|
|
|
|
|
|||||||
где k – коэффициент передачи желаемой системы:
LG (ω=1)
k = 10 |
20 |
. |
|
При построении желаемой ПФ следует помнить, что изменение коэффициента усиления k поднимает или опускает всю ЛАЧХ, полиномы числителя изменяют
200