

Конспект лекций по ТАУ
.pdfИспользуя эту формулу, можно получать ПФ для конкретных схем на базе ОУ.
Рассмотрим схему интегратора на ОУ, показанную на рис. 4.36.
C
R
U1 |
|
U2 |
||
|
|
|
|
|
|
|
|
|
|
Рис. 4.36. Схема интегратора на базе ОУ
W (s) = − |
Zос (s) |
= − |
1 |
= − |
k |
, |
|
|
|
||||
|
Z1 (s) |
RCs |
|
s |
||
где k = 1/RC.
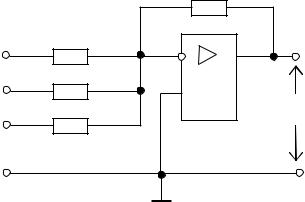
Еще один пример схемы показан на рис. 4.37.
C
R2
R1
211
U1 |
|
U2 |
Рис. 4.37. Пример активного корректирующего звена
Для этой схемы
|
|
|
|
|
|
|
|
1 |
|
R |
|
|
|
|
|
|
|
|
||
|
|
Zoc |
(s) = |
|
|
Cs |
= |
R2 . |
|
|
|
|
||||||||
|
|
|
|
2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1 |
|
+ R2 |
|
|
1+ R2Cs |
|
|
|
|
||||
|
|
|
|
|
|
|
Cs |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Таким образом: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
W (s) = |
U 2 (s) |
= − |
Zос (s) |
= − |
|
|
R2 |
= − |
k |
|
, |
|||||||||
|
|
|
R (1+ R Cs) |
Ts +1 |
||||||||||||||||
|
U |
(s) |
|
Z (s) |
|
|
|
|
|
|
||||||||||
1 |
|
|
|
|
1 |
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|||
где k = -R2/R1 – коэффициент усиления; T = R2С – постоянная времени.
Заметим, что ОУ является линейной системой, поэтому к нему применим принцип суперпозиции (здесь не будем учитывать существующие для реальной микросхемы ограничения параметров).
212

можно выбрать, например, R4 = R5 = 1мОм, а С2 = 1мкФ.
Параметры С2, R1, R2 и R3 должны обеспечивать рассчитанные значения k1, k2 и k3. Например, при выборе С2 = 1мкФ, получаем:
k1 = k2 |
= |
|
1 |
|
|
|
= |
|
1 |
|
|
|
= 10 |
R1 = R2 = 100кОм, |
|
R |
(1×10−6 ) |
|
R (1×10−6 ) |
||||||||||||
|
|
|
|
|
|
|
|||||||||
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
||
|
k3 |
= k2 |
= |
|
|
|
1 |
|
= 0,2 |
R3 = 5мОм . |
|||||
|
|
|
|
|
|
|
|||||||||
|
R |
(1×10−6 ) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
Пример 4.12. Рассмотрим аналоговую реализацию ПИД-регулятора, уравнение которого имеет следующий вид:
|
1 |
t |
de(t) |
||
u(t) = K ke(t) + |
|
e(τ)dτ + Td |
|
, |
|
Ti |
dt |
||||
|
∫0 |
|
|||
где e(t) – ошибка регулирования; k – коэффициент регулятора; К – масштабный множитель; Ti и Td – постоянные времени интегрирования и дифференцирования.
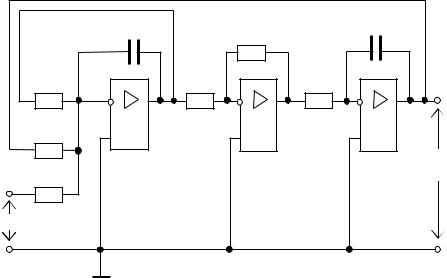
Схема ПИД-регулятора изображена на рис. 4.40.
k
Z1(s)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Ti |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u(t) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
216 e(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.40. Аналоговый ПИД-регулятор
Регулятор имеет три настроечных сопротивления, с помощью которых подобрать параметры закона управления, используя, например, методику Зиглера– Николса.
Аналоговые ПИД-регуляторы, как и вообще аналоговые корректирующие звенья, имеют ряд недостатков,
втом числе:
1.разброс параметров полупроводниковых приборов даже для элементов одного и того же типа;
2.зависимость параметров от окружающей среды и времени;
3.сложность и пониженная точность реализации нелинейных операций;
4.снижение надёжности при возрастании сложно-
сти;
217