

Конспект лекций по ТАУ
.pdfF(s) |
|
|
|
|
Y(s) |
|||
|
W2(s) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U(s) = 0 |
|
||||
|
|
|
|
Yoc(s) |
|
|
|
|
|
|
W1(s) |
Woc(s) |
|||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
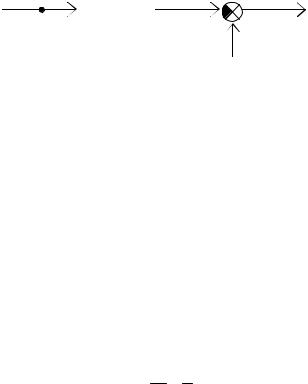
Рис. 2.11. Система управления при отсутствии входного сигнала
Таким образом, ПФ по возмущению:
Wf (s) = |
Y (s) |
= |
|
W2 |
(s) |
|
|
|
|
|
. |
||
F (s) |
|
|
|
|||
|
|
1 + W1 (s)W2 (s)Woc (s) |
||||
Эта ПФ позволяет выразить влияние возмущения на выходной сигнал.
Окончательно выходной сигнал системы выражается формулой
Y (s) = Wзс (s)U (s) + Wf (s)F (s).
Можно легко найти и другие частные ПФ. Помимо входного и выходного сигналов в системе, важными являются сигналы ошибки, возмущающего воздействия и сигнал обратной связи. По отношению к этим сигналам имеется несколько часто использующихся ПФ. Так, для сигнала ошибки имеем
E(s) = We (s)U (s) + Wef (s)F (s),
где We(s) – передаточная функция по ошибке; Wef(s) – ПФ по ошибке и возмущению (от возмущения к ошибке).
Передаточная функция по ошибке и возмущению (от возмущения к ошибке):
81
Wef (s) = |
E(s) |
= |
|
− W2 (s)Woc |
(s) |
|
|
|
|
|
. |
||
F (s) |
|
|
|
|||
|
|
1 + W1 (s)W2 (s)Woc (s) |
||||
Передаточная функция по ошибке:
W (s) = |
E(s) |
= |
|
1 |
. |
|
1 + W1 (s)W2 (s)Woc (s) |
||||
e |
U (s) |
|
|
||
|
|
|
|||
Можно получить эту формулу иначе.
Поскольку E(s) = U(s) – Yос(s), и ПФ по обратной связи
|
|
|
W (s) = |
Yoc (s) |
= |
|
W1(s)W2 (s)Woc (s) |
, |
|
||||||||
|
|
|
|
|
1 + W1 |
|
|
|
|||||||||
|
|
|
Yoc |
|
U (s) |
(s)W2 (s)Woc (s) |
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||
то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
We |
(s) = |
E(s) |
= 1− |
|
W1 (s)W2 (s)Woc (s) |
|
= |
|
1 |
|
. |
||||||
U (s) |
|
+ W1 (s)W2 (s)Woc (s) |
|
|
|
||||||||||||
|
|
1 |
1+ W1 (s)W2 (s)Woc (s) |
||||||||||||||
При единичной обратной связи (Wос(s) = 1): |
|
|
|
||||||||||||||
|
|
|
|
|
W (s) = |
E(s) |
= |
|
|
1 |
. |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
e |
U (s) |
|
1 + W1 (s)W2 (s) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
Передаточная функция We(s) позволяет выразить ошибку e(t) в системе при известном входном воздействии. Это основное средство исследования точности САУ.
2.7. Точность в установившихся режимах
При проектировании систем управления часто требуется оценить ошибку слежения в установившемся режиме
eуст = lim e(t) .
t →∞
82
Эта ошибка зависит как от свойств системы, так и от вида входного сигнала.
Величина установившейся ошибки может быть найдена с помощью теоремы о предельном значении оригинала:
eуст |
= lim e(t) = lim se(s) . |
|
|
t →∞ |
s →0 |
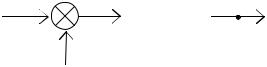
Пример 2.17. Рассмотрим разомкнутую систему управления, заданную передаточной функцией H(t) (рис. 2.12).
g(s) |
H(s) |
y(s) |
e(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.12. Установившаяся ошибка разомкнутой системы
Пусть
|
|
|
H (s) = |
|
1 |
|
; |
g(s) = |
2 |
. |
|
|
|
|||||
|
|
0,1s2 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
+ 0,02s +1 |
|
|
|
s |
|
|
||||||
Тогда по теореме о предельном значении получаем |
|
|||||||||||||||||
eуст = lim s(g(s) − g(s)H (s)) = lim s(g(s)(1 − H (s))) = |
|
|
||||||||||||||||
|
s →0 |
|
|
|
|
|
|
|
s →0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
0,2s2 + 0,04s |
|
|
||||||
= lim |
2 1 |
− |
|
|
|
|
|
|
= lim |
|
|
|
|
|
|
|
= 0. |
|
|
2 |
|
|
|
|
2 |
|
|
|
|
||||||||
|
|
|
0,1s |
+ 0,02s |
|
|
|
|
0,1s |
+ 0,02s + 1 |
|
|
||||||
s →0 |
|
|
+ 1 |
s →0 |
|
|
|
|||||||||||
Рассмотрим более сложный входной сигнал: g(t) = 3t + 2. Ему соответствует изображение по Лапласу:
g(s) = 3 + 2 . s2 s
83
Для этого сигнала:
eуст = lim s(g(s) − g(s)H (s)) = lim s(g(s)(1 − H (s))) = |
||||||||||||||||||||||
|
|
s →0 |
|
|
|
|
|
|
|
|
|
|
|
|
s →0 |
|
||||||
|
|
3 |
|
|
|
0,1s |
2 |
+ 0,02s |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= lim |
+ |
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|||||||
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
s →0 |
|
s |
|
|
|
0,1s |
+ 0,02s + 1 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
0,3s + 0,06 |
|
|
|
0,2s |
2 |
+ 0,04s |
|
|||||||||||
= lim |
|
|
|
|
+ |
|
|
|
|
= 0.06 |
||||||||||||
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||||
|
|
0,1s |
+ 0,02s + 1 |
0,1s |
|
|
|
|
|
|
|
|
|
|||||||||
s →0 |
|
|
+ 0,02s + 1 |
|
||||||||||||||||||
Рассмотрим далее вариант, когда ПФ имеет коэффициент усиления k:
H (s) = |
|
k |
|
; x(s) = |
2 |
. |
0,1s2 |
+ 0,02s +1 |
|
||||
|
|
s |
||||
Тогда по теореме о предельном значении получаем
eуст = lim s(g(s) − g(s)H (s)) = |
|||||||
|
s →0 |
|
|
|
|
|
|
|
|
− |
|
|
k |
|
|
|
|
|
|
||||
2 1 |
|
2 |
|
|
|||
= lim |
0,1s |
|
|
||||
s →0 |
|
|
|
+ 0,02s + 1 |
|
||
= 2 − 2k.
lim s(g(s)(1 − H (s))) = |
|
|
|
|
|||||
s →0 |
|
|
|
|
|
|
|
|
|
|
0,2s |
2 |
+ 0,04s + 2 |
− 2k |
|
||||
= lim |
|
|
= |
||||||
|
|
|
2 |
|
|
|
|||
|
0.1s |
+ 0,02s |
+ 1 |
|
|
||||
s →0 |
|
|
|
||||||
И при k = 3, например, получаем ошибку –4.
В замкнутой системе управления также можно использовать теорему о предельном значении:
eуст |
= lim e(t) = lim se(s) . |
|
|
t →∞ |
s →0 |
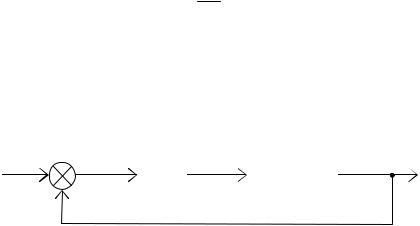
Рассмотрим замкнутую систему управления с единичной обратной связью (рис. 2.13).
84

g(s) |
e(s) |
|
y(s) |
|
H(s) |
||||
|
|
|
||
|
|
|
|
Рис. 2.13. Система с единичной обратной связью |
|||
e(s) = g(s) − y(s) = g(s) − H (s)e(s) |
|||
e(s) = |
|
1 |
g(s) = We g(s), |
|
|
||
|
|
||
1 |
+ H (s) |
||
где We(p) – передаточная функция по ошибке. Таким образом:
eуст = lim e(t) = lim se(s) = lim s(We (s)g(s)). |
||
t →∞ |
s →0 |
s →0 |
Обычно точность САУ определяют для типовых режимов работы. Простейшими из них являются режимы:
1. при постоянной величине внешнего воздействия:
|
|
1 |
|
|
|
eуст = lim s |
|
We |
(s) |
= |
|
|
|||||
s→0 |
s |
|
|
|
|
1 |
, |
K = lim(H (s)); |
|
1 + K |
|||
|
s →0 |
2. при изменении внешнего воздействия с постоянной скоростью:
|
|
|
1 |
|
|
|
1 |
|
|
|
= lim(sH (s)); |
e |
= lim s |
|
W (s) |
= |
|
, |
K |
|
|||
|
|
|
|||||||||
уст |
s →0 |
s2 |
e |
|
|
KV |
|
V |
s →0 |
||
85
3. при изменении с постоянным ускорением (параболическое воздействие).
|
|
|
1 |
|
|
|
1 |
|
|
2 |
|
e |
= lim s |
|
W |
(s) |
= |
|
, K |
|
= lim(s |
H (s)). |
|
|
|
|
|||||||||
уст |
s →0 |
s3 |
e |
|
|
K A |
|
A |
s →0 |
|
|
Пример 2.18. Дана передаточная функция разомкнутой системы
W (s) = |
3 |
. |
2s2 + 4s + 1 |
Требуется найти установившуюся ошибку замкнутой системы при входном воздействие g(t) = 2.
Решение.
|
|
W (s) = |
2s2 + 4s + 1 |
, |
|
|
||||||
|
|
|
|
|
||||||||
|
|
e |
|
|
2s2 + 4s + 4 |
|
|
|||||
|
|
|
2 |
|
2s2 + 4s + 1 |
|
|
|||||
e |
|
(s) = lim s |
|
|
|
|
|
|
|
|
= 0,5. |
|
уст |
|
|
2 |
|
|
|
||||||
|
|
s |
|
2s |
+ 4s + 4 |
|
|
|||||
|
|
s →0 |
|
|
|
|
||||||
Пример 2.19. Определить статическую ошибку системы, приведенной на рис. 2.14 при g(t) = 1 + 2t .
86
g(t) |
e(t) |
5 |
|
y(t) |
||
|
|
|
|
|
|
|
|
|
|
s(2s + 1) |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.14. Пример замкнутой системы
Решение.
|
|
eуст = lim e(t) = lim se(s) = lim s(We (s)g (s)) . |
||||||||||||||
|
|
t →∞ |
s →0 |
|
|
|
|
s |
→0 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
1 |
|
|
|
|
|
e |
= lim s(g(s)W (s)) = lim s |
|
|
+ |
|
|
|
|
|
|
|
|
= |
|||
|
|
|
|
5 |
|
|
||||||||||
уст |
s →0 |
e |
s →0 |
|
s |
|
s2 |
1 + |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
s(2s |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
+ 1) |
|
|||
|
|
|
2 |
|
s(2s + 1) |
|
|
s(2s + 1) |
|
2(2s + 1) |
|
|
lim |
1 |
+ |
|
|
|
|
= lim |
|
+ |
|
|
= 0,4. |
|
|
|
|
|||||||||
|
|
|
s s(2s + 1) + 5 |
|
|
|
|
|
|
|
||
s →0 |
|
|
s →0 s(2s + 1) + 5 |
|
s(2s + 1) + 5 |
|
||||||
Передаточную функцию разомкнутой системы H(s) можно представить в следующем виде:
H (s) = |
k(b sm + b |
sm−1 |
+ ... + b s +1) |
= |
k R(s) |
||
m |
m−1 |
1 |
|
, |
|||
sr (a sn + a |
sn−1 |
+ ... + a s +1) |
sr Q(s) |
||||
|
n |
n−1 |
1 |
|
|
|
|
где k – коэффициент усиления разомкнутой системы; r – количество нулевых полюсов в системе (порядок астатизма).
Тогда
|
(s) = |
|
1 |
g(s) = |
|
1 |
|
g(s) = |
srQ(s) |
||
We |
|
|
|
|
|
|
|
g(s) . |
|||
|
+ H (s) |
|
|
|
|
|
|||||
|
1 |
1 |
+ |
kR(s) |
srQ(s) + kR(s) |
||||||
|
|
|
|
srQ(s) |
|
|
|
|
|||
87
Введем обозначения для систем с разным порядком астатизма:
H0 |
(s) = |
kR(s) |
; |
H1 |
(s) = |
kR(s) |
; |
H2 |
(s) = |
kR(s) |
. |
|
|
|
|||||||||
|
|
Q(s) |
|
|
sQ(s) |
|
|
s2Q(s) |
|||
Рассмотрим установившуюся ошибку при различных значе-
ниях входного сигнала. |
|
|
|
|
|
|
|
|
|
|||||
1) Пусть на вход |
замкнутой |
системы подан постоянный |
||||||||||||
сигнал: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g(t) = g0 |
= const , g(s) = |
g0 |
|
, |
|
|
||||||||
s |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
eуст = lim s |
g0 |
|
|
1 |
= lim |
|
|
g0 |
|
. |
||||
s 1 |
+ H (s) |
|
+ H ( p) |
|||||||||||
s →0 |
|
|
s →0 1 |
|
||||||||||
При H(s) = H0(s) получаем |
|
|
|
|
|
|
|
|
||||||
eуст = lim |
|
|
|
Q(s) |
|
g0 = |
|
g0 |
. |
|
||||
|
|
|
1 + k |
|
||||||||||
s →0 Q(s) + kR(s) |
|
|
||||||||||||
Как видно из этой формулы, для уменьшения величины ошибки надо увеличивать общий коэффициент усиления k разомкнутой цепи системы. Поэтому величина k именуется доб-
ротностью системы.
Признак статической системы – отсутствие нулевых полюсов у ПФ разомкнутой системы.
При H(s) = H1(s) получаем
eуст = lim |
sQ(s) |
g0 = 0 . |
|
||
s →0 sQ(s) + kR(s) |
|
|
Аналогичный результат получается при r = 1, 2…
88

В следящей системе интегрирующим звеном, создающим астатизм, является исполнительный двигатель. Угол поворота вала (или линейное перемещение) будет пропорционален интегралу от входного управляющего сигнала (напряжения).
2) Движение с постоянной скоростью.
g (t) = g0 + g1 t,
g0 = const , g1 = const.
|
g(s) = |
g0 |
+ |
|
g1 |
. |
|
|
||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
s |
|
|
|
s2 |
|
|
||
|
|
g |
0 |
|
|
g |
|
1 |
|
|||||
e = lim s |
|
+ |
|
1 |
|
|
|
; |
||||||
|
|
|
|
|
|
|
|
|||||||
уст |
s →0 |
s |
|
|
s2 1 + H (s) |
|||||||||
|
|
|
||||||||||||
При H(s) = H0(s) получаем
e = lim |
sQ(s) |
g |
0 |
+ |
g |
|
= ∞ . |
||
|
|
|
1 |
|
|||||
|
|
|
|
||||||
уст |
s →0 |
Q(s) + k R(s) s |
|
s2 |
|
||||
|
|
|
|||||||
При H(s) = H1(s) получаем
e = lim |
s2Q(s) |
g |
0 |
+ |
g |
|
= |
g |
|||
|
|
|
1 |
|
1 |
. |
|||||
|
|
|
|
|
|||||||
уст |
s→0 |
sQ(s) + k R(s) s |
|
s2 |
|
k |
|||||
|
|
|
|||||||||
Эта ошибка называется скоростной ошибкой системы. При H(s) = H2(s) получаем
e = lim |
s3Q(s) |
g |
0 |
+ |
g |
||
|
|
|
1 |
||||
|
|
|
|
||||
уст |
s→0 |
s2Q(s) + k R(s) s s2 |
|||||
|
|||||||
3) Движение с постоянным ускорением
g(t) = g0 + g1t + g2t 2 ,
g(s) = g0 + g1 + g2 . s s2 s3
= 0 .
89
При H(s) = H0(s) получаем
e = lim |
s Q(s) |
g |
0 |
+ |
g |
+ |
g |
2 |
|
= ∞ . |
||
|
|
|
1 |
|
|
|||||||
|
|
|
|
|
|
|||||||
уст |
s→0 |
Q(s) + k R(s) |
s |
|
s2 |
|
s3 |
|
||||
|
|
|
|
|||||||||
При H(s) = H1(s) получаем
|
|
= lim |
s2 Q(s) |
g |
0 |
+ |
|
g |
+ |
|
g |
2 |
|
|
= ∞ . |
|||||||||||
e |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
уст |
s→0 |
sQ(s) + k R(s) s |
|
|
s2 |
|
|
s3 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
При H(s) = H2(s) получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
= lim |
|
s3 Q(s) |
g |
0 |
|
+ |
g |
+ |
g |
2 |
|
= |
g |
2 |
|
||||||||||
e |
|
|
|
|
|
|
1 |
|
|
|
|
|
. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
уст |
|
s→0 s2Q(s) + k R(s) s |
|
|
|
s2 |
|
|
s3 |
|
k |
|||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
Это ошибка системы по ускорению. Величина
k = g2 .
eуст
называется добротностью по ускорению системы.
Она может использоваться для оценки точности только систем с астатизмом второго порядка.
Пример 2.20. Рассмотрим установившуюся ошибку в системе с П-регулятором (рис. 2.15).
g(t) |
|
|
e(t) |
|
u(t) |
5 |
|
y(t) |
|
|
|
|
|
Kp |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s +1 |
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Рис. 2.15. Пример П-регулятора
Пусть g(t) = 40, тогда g(s) = 40/s и
90