

Конспект лекций по ТАУ
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное учреждение высшего профессионального образования
«Санкт-Петербургский государственный университет аэрокосмического приборостроения»
_________________________________________________________________
М. В. Бураков
Теория автоматического управления.
Часть 1
Учебное пособие
Санкт-Петербург
2013
УДК 681.5
ББК
Рецензенты:
Кандидат технических наук Д. О. Якимовский (Федеральное государственное предприятие «НИИ командных приборов»). Кандидат технических наук доцент А. А. Мартынов
(Санкт-Петербургский государственный университет аэрокосмического приборостроения)
Утверждено Редакционно-издательским советом университета
в качестве учебного пособия
Бураков М.В.
Д79 Теория автоматического управления: учеб. пособие. Часть 1/ М. В. Бураков;– СПб.: ГУАП, 2013. -258 с.: ил.
ISBN
В учебном пособии рассматриваются основы теории автоматического управления – базового курса при подготовке инженеров в области автоматизации и управления.
Приводятся основные понятия и принципы управления, рассматриваются математические модели и методы анализа и синтеза линейных и дискретных систем управления на базе аппарата передаточных функций.
Учебное пособие предназначено для подготовки бакалавров и магистров по направлению 220400 «Управление в технических системах», а также студентов других специальностей, изучающих дисциплины «Теория автоматического управления» и «Основы теории управления».
|
УДК 681.5 |
|
ББК |
ISBN |
© Санкт-Петербургский государственный |
|
университет аэрокосмического |
|
приборостроения (ГУАП), 2013 |
© |
М. В. Бураков, 2013 |
2
©
СОДЕРЖАНИЕ |
|
1. БАЗОВЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ |
6 |
1.1. Краткая история развития ТАУ |
6 |
1.2. Основные понятия ТАУ |
17 |
1.3. Способы описания объектов управления |
26 |
1.4. Линеаризация |
32 |
1.4. Критерии качества управления |
37 |
1.5. Регуляторы по отклонению |
39 |
Вопросы для самопроверки |
44 |
2. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ |
47 |
2.1. Преобразование Лапласа |
47 |
2.2. Понятие передаточной функции |
55 |
2.3. Типовые динамические звенья |
64 |
2.4. Временные характеристики |
69 |
2.5. Передаточная функция системы с обратной |
74 |
связью |
|
2.6. Частные передаточные функции |
78 |
2.7. Точность в установившихся режимах |
81 |
2.8. Преобразование структурных схем |
90 |
2.9. Сигнальные графы и формула Мейсона |
94 |
2.10. Инвариантные системы |
102 |
Вопросы для самопроверки |
107 |
3. КОРНЕВЫЕ ОЦЕНКИ УСТОЙЧИВОСТИ И КА- |
83 |
ЧЕСТВА |
|
3.1. Необходимое и достаточное условие устойчи- |
83 |
вости |
|
3.2. Алгебраический критерий устойчивости |
86 |
3.3. Структурно неустойчивые системы |
89 |
3.4. Корневые показатели качества переходного |
92 |
процесса |
|
3.5. Выбор параметров регулятора |
95 |
3.6. Корневой годограф |
100 |
3
Вопросы для самопроверки |
104 |
4. ЧАСТОТНЫЕ МЕТОДЫ АНАЛИЗА И СИНТЕЗА |
106 |
4.1. Преобразование Фурье |
106 |
4.2. Логарифмические частотные характеристики |
109 |
4.3. Частотные характеристики разомкнутой систе- |
116 |
мы |
|
4.4. Частотные критерии устойчивости |
119 |
4.4.1. Критерий устойчивости Михайлова |
119 |
4.4.2. Критерий устойчивости Найквиста |
122 |
4.4.3. Критерий Найквиста для систем с запазды- |
125 |
ванием |
|
4.5. Частотные критерии качества |
127 |
4.5.1. Запасы устойчивости |
127 |
4.5.2. Точность при гармоническом воздействии |
129 |
4.6. Синтез корректирующих устройств |
132 |
4.6.1. Оценка качества следящей системы по виду |
132 |
ЛАЧХ разомкнутой системы |
|
4.6.2. Коррекция с помощью дифференцирующего |
133 |
устройства |
|
4.6.3. Коррекция с помощью интегро- |
134 |
дифференцирующей цепи |
|
4.6.4. Синтез корректирующего звена общего вида |
136 |
4.7. Аналоговые корректирующие звенья |
141 |
4.7.1. Пассивные корректирующие звенья |
141 |
4.7.2. Активные корректирующие звенья |
144 |
Вопросы для самопроверки |
150 |
5. ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ |
152 |
5.1. Аналого-цифровое и цифро-аналоговое преоб- |
152 |
разование |
|
5.2. Реализация ЦАП и АЦП |
155 |
5.3. Z - преобразование |
157 |
5.4. Теорема о сдвиге |
160 |
5.5. Синтез цифровых систем из непрерывных |
162 |
5.6. Устойчивость дискретных систем управления |
168 |
4
5.7. Идентификация динамического объекта |
168 |
5.7.1. Задача идентификации |
168 |
5.7.2. Детерминированный идентификатор |
170 |
5.7.3. Построение МНК-модели по кривой разгона |
171 |
Вопросы для самопроверки |
173 |
6. АДАПТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ |
175 |
6.1. Классификация адаптивных систем |
175 |
6.2. Экстремальные системы управления |
176 |
6.3. Адаптивное управление с эталонной моделью |
181 |
Вопросы для самопроверки |
187 |
ЗАКЛЮЧЕНИЕ |
188 |
Библиографический список |
189 |
5
− БАЗОВЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
o Краткая история развития теории автоматиче-
ского управления
Можно определить теорию автоматического управления как науку о методах определения законов управления какими-либо объектами, допускающих реализацию с помощью технических средств.
Первые автоматические устройства были разработаны человеком еще в глубокой древности, об этом позволяют судить дошедшие до нас письменные свидетельства. В работах древнегреческих и древнеримских ученых даны описания различных автоматических устройств: годометр – автоматическое устройство для измерения расстояния на основе пересчета количества оборотов колеса повозки; автоматы для открывания дверей и продажи воды в храмах; автоматические театры с кулачковыми механизмами; устройство для метания стрел с автоматической их подачей. На рубеже нашей эры арабы снабдили поплавковым регулятором уровня водяные часы (рис. 1.1).
В Средние века получила развитие «андроидная» автоматика, когда конструкторы-механики создавали устройства, подражающие отдельным действиям человека. Название «андроид» подчеркивает человекоподобность автомата. Функционировали андроиды на основе часовых механизмов.
Можно выделить несколько факторов, вызвавших необходимость разработки систем управления в XVII – XVIII:
1.развитие часового дела, вызванного потребностями бурно развивающегося мореплавания;
2.развитие мукомольной промышленности и необходимость регулирования работы водяных мельниц;
3.изобретение паровой машины.
6
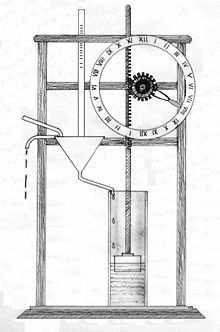
Рис. 1.1. Конструкция водяных часов
Хотя известно, что еще в средние века применялись центробежные уравнители скорости в водяных мукомольных мельницах, первой системой управления с обратной связью считается регулятор температуры голландца Корнелиуса Дреббеля (1600 г.). В 1675 г. X. Гюйгенс встроил в часы маятниковый регулятор хода. Дени Папен в 1681 г. изобрел первый регулятор давления для паровых котлов.
Паровая машина стала первым объектом для промышленных регуляторов, так как она не обладала способностью устойчиво работать сама по себе, т.е. не обладала «самовыравни-
ваем» (рис. 1.2).
7
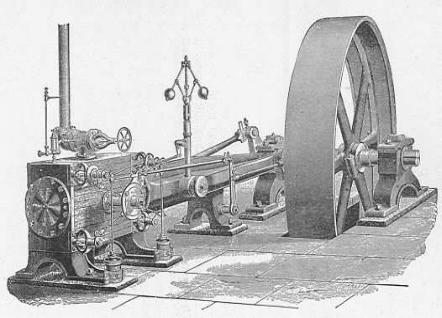
Рис.1.2. Паровая машина с регулятором
Первыми промышленными регуляторами являются автоматический поплавковый регулятор питания котла паровой машины, построенный в 1765 г. И. И. Ползуновым, и центробежный регулятор скорости паровой машины, на который в 1784 г. получил патент Дж. Уатт (рис. 1.3).
Эти первые регуляторы являлись системами прямого регулирования, т. е. для приведения в действие регулирующих органов не требовались дополнительные источники энергии – чувствительный элемент непосредственно перемещал регулирующий орган (современные системы управления являются системами непрямого регулирования, так как практически всегда сигнал ошибки недостаточен по мощности для управления регулирующим органом).
8
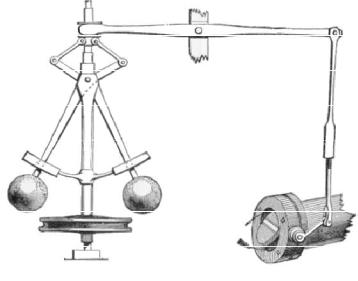
Рис. 1.3. Центробежный регулятор Уатта.
Паровая машина не случайно стала первым объектом для применения техники и теории регулирования, так как она не обладала способностью устойчиво работать сама по себе, не имела самовыравнивания.
Следует отметить также важность создания первого программного устройства управления ткацким станком от перфокарты (для воспроизведения узоров на коврах), построенного в 1808 г. Ж. Жаккаром.
Изобретение Ползунова было не случайным, поскольку в конце 18-го века металлургическая промышленность России занимала лидирующие позиции в мире. В дальнейшем российские ученые и инженеры продолжали вносить большой вклад в развитие теории автоматического управления.
Первая работа по теории регулирования появилась в 1823 г., и написана она профессором Петербургского университета Чижовым.
9
В1854 г. К. И.Константинов предложил использовать разработанный им «электромагнитный регулятор скорости вращения» вместо конического маятника в паровых машинах. В нем вместо центробежного механизма используется электромагнит, регулирующий впуск пара в машину. Предложенный Константиновым регулятор обладал большей чувствительностью, чем конический маятник.
В1866 г. А. И. Шпаковский разработал регулятор для парового котла, который отапливался с помощью форсунок. Подача топлива через форсунки была пропорциональна изменению давления пара в котле. Если давление падало, расход топлива через форсунки увеличивался, что приводило к увеличению температуры и , как следствие, к увеличению давления.
В1856 г. в Москве во время коронации Александра III было установлено шесть мощных электродуговых ламп с автоматическим регулятором Шпаковского. Это был первый практически осуществленный опыт изготовления установки и длительной эксплуатации серии электромеханических регуляторов.
С 1869–1883 гг. В. Н. Чиколев разработал ряд электромеханических регуляторов, в том числе дифференциальный регулятор для дуговых ламп, который сыграл важную роль в истории техники регулирования.
Датой рождения теории автоматического управления (ТАУ) называют обычно 1868 г., когда вышла в свет работа Дж. Максвелла «О регуляторах», в которой дифференциальное уравнение было использовано как модель регулятора.
Большой вклад в развитие ТАУ внес русский математик и инженер И. А. Вышнеградский. В работе «Об общей теории регуляторов», опубликованной в 1876 г. он рассмотрел паровую машину и центробежный регулятор как единую динамическую систему. Вышнеградский сделал наиболее практически важные выводы по устойчивому движению систем. Он впервые ввел понятие линеаризации дифференциальных уравнений, таким образом, значительно упростив математический аппарат исследова-
10