

Конспект лекций по ТАУ
.pdfСтруктурной схемой называется схема САУ, изображенная в виде соединения составляющих ее звеньев.
Структурная схема показывает строение автоматической системы, наличие внешних воздействий и точки их приложения, пути распространения воздействий и выходную величину. Динамическое или статическое звено изображается прямоугольником. Воздействия на систему и влияние звеньев друг на друга (сигналы) изображаются стрелками. В каждом звене воздействие передается только от входа звена к его выходу.
На динамическое звено может воздействовать лишь одна входная величина, поэтому используются блоки суммирования и сравнения (вычитания) сигналов (рис. 1.5а и 1.5б, где черный сектор означает вход со знаком минус). Суммироваться и сравниваться могут лишь сигналы одной и той же физической природы.
а) |
|
|
б) |
x1 |
y = x1 + x2 |
x1 |
y = x1 – x 2 |
|
x2 |
|
x2 |
|
|
|
Рис. 1.5. Обозначение блоков суммирования и вычитания
Структурная схема может быть составлена по дифференциальным уравнениям системы.
Принцип разомкнутого управления является самым простым и распространенным в технических системах (рис. 1.6). Он применяется для управления стационарными объектами, в которых возмущающие воздействия f не оказывают влияния на выходную величину y, или если влияние изменений параметров объекта и возмущающих воздействий известно заранее и может быть учтено в законе управления u(t).
21

|
f(t) |
|
|
u(t) |
|
y(t) |
|
Объект |
|||
|
|
||
|
управления |
|
|
|
|
|
Рис. 1.6. Разомкнутое управление
Таким образом, при разомкнутом управлении не производится контроль состояния объекта, т.е. САУ работает на основе заранее известной информации. Примерами САУ с разомкнутым управлением являются, например, системы числового программного управления металлообрабатывающими и ткацкими станками, а также программные системы, предназначенные для включения, переключения режимов работы и выключения объектов различного назначения.
Принцип управления по отклонению основан на исполь-
зовании сигнала отрицательной обратной связи, с помощью которого вычисляется ошибка управления. Например, рассмотрим задачу управления скоростью автомобиля (рис. 1.7).
желаемая |
|
регулятор |
|
|
скорость |
ошибка |
|
Педали |
|
|
Водитель |
Автомобиль |
||
|
|
|||
|
|
газа и |
||
|
|
|
|
|
|
|
|
тормоза |
|
|
|
|
Визуальная |
скорость |
|
|
|
|
|
|
|
|
оценка |
|
Рис. 1.7. Система управления скоростью автомобиля Система, показанная на рис. 1.7, не является автоматической,
поскольку в качестве регулятора здесь выступает человек, на-
22
жимающий педали газа и тормоза. Однако алгоритм управления здесь очевидно прост, и может быть легко реализован с помощью автоматического устройства.
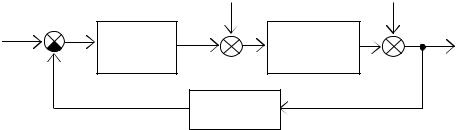
Система управления с обратной связью называется замкнутой, поскольку с помощью обратной связи осуществляется контроль выходной величины. Общий вид замкнутой системы управления показан на рис. 1.8.
|
|
f1(t) |
|
f2(t) |
g(t) |
e(t) |
u(t) |
Объект |
y(t) |
|
|
|
||
|
|
Регулятор |
|
|
|
|
управления |
|
|
|
|
|
|
Датчик
Рис. 1.8. Система управления с обратной связью
Задающее воздействие g(t) описывает желаемое значение выхода объекта управления y(t). Ошибка управления e(t) = g(t) – y(t) используется регулятором для формирования сигнала управления u(t). Объект представляет собой динамическую систему, которая может быть неустойчивой или обладать плохими динамическими свойствами. Регулятор служит для улучшения динамического поведения объекта. На входе и выходе объекта присутствуют шумы f1(t) и f2(t) (при синтезе регулятора ими часто пренебрегают).
Регулятор представляет собой аналоговое или цифровое электронное устройство, преобразующее электрические сигналы. Сигнал управления поступает на усилительные и преобразовательные устройства, входящие в состав объекта управления.
В процессе разработки САУ требуется решить две задачи – анализ и синтез САУ.
23

При анализе САУ необходимо определить ее свойства (показатели качества регулирования) при заданной структуре с конкретными параметрами.
При синтезе САУ, наоборот, имея необходимую информацию об объекте управления, задаются свойствами системы, определяют конкретные требования к ней и затем отыскивают условия (структуру, элементы, параметры регулятора), при которых будут выполняться эти требования.
Задача синтеза регулятора в САУ может рассматриваться как задача синтеза обратной модели объекта (рис. 1.9).
g(t) |
F-1 |
|
F |
y(t) |
|
|
|
||
|
|
|
|
|
Рис. 1.9. Идеализированная разомкнутая система управления
Если F – оператор объекта, а F-1 – оператор регулятора, то при любых условиях выполняется
y(t) = g(t) F-1 F = g(t),
т. е. выходной сигнал в точности соответствует входному сигналу.
Однако в реальности точное получение обратной модели объекта обычно невозможно, и задача синтеза решается приближенно.
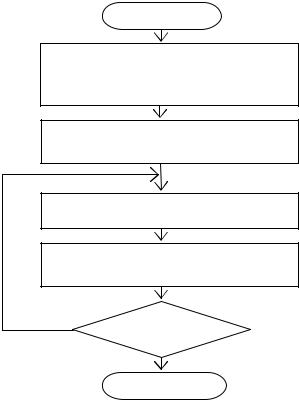
В целом процесс проектирования САУ может быть описан с помощью алгоритма, показанного на рис. 1.10.
24
начало
Определение целей управления, выбор управляемых переменных и формулировка требований к этим переменным
Выбор конфигурации системы и исполнительного устройства
Получение модели системы управления
Оптимизация параметров регулятора и анализ качества управления
нет
Качество хорошее?
конец
Рис. 1.10. Алгоритм проектирования системы управления
Порядок уравнений динамики САУ зависит от сложности процессов, протекающих в нем, и от принятых допущений. Если же снизить порядок не удается, то существует прием, называе-
мым методом разделения движения, который существенно уп-
рощает расчет и проектирование систем управления. Если в САУ есть движения, не сопоставимые по времени протекания (медленные и быстрые процессы), то тогда систему можно разделить на две системы. Каждая из них описывают поведение
25
САУ, но в различных масштабах времени. Например, изменение угла тангажа летательного (или подводного) аппарата является более быстрым процессом, чем движение по траектории.
o Способы описания объектов управления
Разработка модели объекта управления является центральной задачей при проектировании САУ. Никакая модель не может быть полностью адекватной объекту, поэтому при построении модели всегда оговариваются условия, при которых ее можно использовать.
Существуют два подхода к построению модели объекта управления:
1.используется аналитическое описание с помощью дифференциальных уравнений, которое опирается на «глубинные» знания, полученные на основе законов физики, химии, биологии
идругих фундаментальных наук. Это модель типа «белый ящик»;
2.используется модель типа «черного ящика», у которого известны входы и выходы. Задача модели – наилучшим образом подражать поведению этого «черного ящика». Внутренние механизмы поведения объекта не рассматриваются.
Вобоих случаях возникает задача идентификации – настройки параметров модели с целью достижения наибольшего сходства между ее выходом и выходом объекта.
Рассмотрим модели типа «белый ящик». Они используют фундаментальные законы, которые сами по себе являются моделями. Например, закон Ома или 2-й закон Ньютона являются моделями, которые можно использовать для описания физических процессов. Такие модели представляют собой дифференциальные уравнения (уравнения динамики), описывающие движение системы. Из уравнений динамики, положив все производные равными нулю, можно получить уравнения статики, ко-
26
торые описывают поведение системы в установившемся режиме.
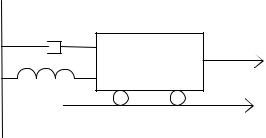
Пример 1.1. Предположим, что у нас есть подвижная масса (тележка), пружина и демпфер (рис. 1.11, где b – коэффициент демпфирования; k – коэффициент жесткости пружины; F – внешняя сила (вход объекта); x – горизонтальная координата (выход)).
b
F
M
k
x
Рис. 1.11. Пример динамического объекта
В соответствии со 2-м законом Ньютона можно записать уравнения динамики:
M&x& = F − kx − bx&,
а также уравнение статики:
F = kx.
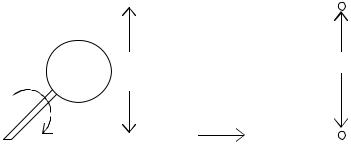
Пример 1.2. Двигатель постоянного тока (рис. 1.12, где u(t) - напряжения якоря (вход), θ(t) – угол поворота вала (выход объекта), ω(t) - угловая скорость вращения, e(t) – электродвижущая сила (ЭДС) якоря, i(t) – ток якоря, R – сопротивление якорной цепи.
27
R
|
|
|
|
|
|
|
ω(t) |
|
|
e(t) |
|
u(t) |
|
|
|
|
||||
|
|
|
||||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
i(t) |
||
|
|
|
|
|||
|
|
|
|
|
|
|
Рис. 1.12. Двигатель постоянного тока
Вал двигателя начинает вращаться, когда приложено напряжение питания. Если u(t) не меняется, угловая скорость вращения ω(t) остается постоянной, при этом угол θ(t) равномерно увеличивается. Чем больше напряжение, тем быстрее вращается вал. Если подключить нагрузку, скорость вращения постепенно уменьшается до нового значения, при котором вращающий момент двигателя будет равен моменту сопротивления нагрузки.
Если подключить к валу двигателя нагрузку, то скорость вращения постепенно уменьшается до нового значения, при котором вращающий момент двигателя будет равен моменту сопротивления нагрузки. Пока эти моменты равны, скорость вращения остается постоянной и ее производная равна нулю.
В механике уравнение вращательного движения обычно записывают в виде
J |
dω(t) |
= M (t) − M |
|
(t) , |
|
H |
|||
|
dt |
|
||
где M(t) – вращающий момент (H·м), MH(t) – момент нагрузки (возмущение, H·м). Буквой J обозначен момент инерции механизма, приведенного к валу двигателя (в кг·м2). Величина мо-
28
мента инерции говорит о том, насколько легко «разогнать» двигатель (чем больше момент инерции, тем сложнее «разогнать»).
Электромагнитный момент двигателя вычисляется по форму-
ле
M (t) = CM Φi(t),
где Cм – коэффициент, Φ – магнитный поток, создаваемый обмоткой возбуждения (измеряется в веберах).
Ток в цепи может быть найден из уравнения:
u(t) = e(t) + Ri(t).
Электродвижущая сила рассчитывается через магнитный поток и частоту вращения:
e(t) = Cω Φω(t),
где Cω – коэффициент.
Вводя обозначения: k1 = CмΦ и k2 = CωΦ, можно записать модель двигателя в виде системы уравнений
J |
dω(t) |
= k i − M |
|
(t); |
||
|
|
H |
||||
|
dt |
1 |
|
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
e(t) = k2ω(t); |
|
, |
||||
|
|
dθ(t) |
|
|
||
ω(t) = |
; |
|
|
|||
|
|
|
||||
|
|
|
dt |
|
|
|
= +
u(t) e(t) Ri(t).
Рассматривая последние три уравнения, найдем i(t):
|
u(t) − k2 |
dθ |
|
||
i(t) = |
dt |
. |
|||
|
|||||
R |
|
||||
|
|
|
|
||
Таким образом: |
|
|
|
||
29

|
|
|
|
|
|
|
|
|
|
− k |
|
dθ |
|
|
||
|
|
|
|
|
|
k |
u(t) |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||
J |
d 2θ |
|
= |
1 |
|
|
|
|
|
2 |
dt |
− M H (t) |
||||
|
dt 2 |
|
|
|
|
|
R |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
d 2θ |
+ |
|
k k |
|
dθ |
= |
k u(t) |
− M H |
|
|||||
J |
|
|
1 2 |
|
|
|
1 |
|
|
(t) |
||||||
dt2 |
|
R dt |
|
|
R |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||
Вводя обозначения для констант, и деля на MH:
.
.
a1 d 2θ2 + a2 dθ +1 = bu(t) . dt dt
Это линейное дифференциальное уравнение 2-го порядка. При рассмотрении моделей типа «черный ящик» необходимо
использовать экспериментальную информацию о поведении объекта, которая должна быть достаточно разнообразной для выявления свойств объекта. Далее выбирается структура модели, в качестве которой может выступать разностное уравнение, искусственная нейронная сеть, набор нечетких правил или иная математическая конструкция, сложность которой соответствует сложности объекта. Затем решается задача идентификации, т. е. такого подбора параметров, при котором выход модели будет наиболее близок экспериментальным данным.
Экспериментальные методы определения динамических характеристик объектов управления делятся на два класса:
−методы определение временных характеристик объекта управления;
−методы определение частотных характеристик объекта управления.
Временные методы определения динамических характеристик делятся, в свою очередь, на две группы: активные и пассивные.
Активные методы предполагает подачу на вход объекта пробных тестирующих сигналов, а пассивные лишь фиксируют естественное движение объекта в процессе его нормального
30