

Лекция 1 Общие сведения о стохастических системах

1.1 Общие сведения о системах
В практических задачах системой обычно называют любую совокупность взаимодействующих предметов любой природы. Примерами систем являются окружающий нас мир или какая-либо часть, завод, вычислительная машина, летательный аппарат и т.д.
Всякая система, взаимодействуя с окружающей средой, что-то получает извне и после переработки что-то отдает в окружающую среду, в частности другим системам. В этом заключается функционирование системы [3].
Обычно говорят, что система на входе получает определенные данные, на выходе выдает некоторые другие. Вычислительная машина на входе получает числовые данные, а на выходе выдает переработанные данные в виде полезной информации.
В настоящее время решающую роль в разработке, совершенствовании и эксплуатации различного рода сложных систем, таких, например, как системы обработки информации, управления и информационные системы, играет математическое моделирование с применением современных вычислительных и программных средств.
Первым шагом в построении математической модели системы является математическое описание того, что система получает на входе и выдает на выходе.
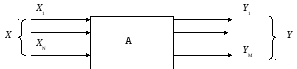
Величины, определяющие внешнее воздействие на систему, называются входными сигналами. Величины, определяющие действие системы на окружающую среду, на другие системы, называются выходными сигналами.
Кроме входных и выходных сигналов для построения математической модели системы приходится вводить некоторые вспомогательные величины, характеризующие действия различных частей системы друг на друга (внутренние взаимодействия частей системы). Все эти величины, характеризующие состояние системы в каждый данный момент времени, называются переменными состояния системы.
Множество всех возможных входных сигналов системы называют ее пространством входных сигналов. Множество всех возможных выходных сигналов – пространством выходных сигналов. Вектором состояния называют всю совокупность переменных состояния системы.
Входные и выходные сигналы системы как определенные функции времени, а также изменение вектора состояния со временем характеризуют функционирование или состояние системы.
Основной характеристикой системы является ее оператор, определяющий механизм формирования выходного сигнала по данному входному сигналу. Оператор детерминированной системы ставит в соответствие каждому входному сигналу один определенный выходной сигнал – т.о. отображает пространство входных сигналов X в пространство выходных сигналов Y.
Соотношение между входными и выходными сигналами детерминированной системы можно записать в виде операторного уравнения :
у(t) = Ax(t).
Детерминированная система называется физически возможной, если значение ее выходного сигнала у(t) в каждый момент времени t не зависит от значений входного сигнала x(τ) при τ>t. Таким образом, значение выходного сигнала физически возможной системы у(t) в каждый момент t является функционалом от входного сигнала x(τ), заданного в интервале t0≤ τ≤ t.
В практических задачах приходится встречаться с различными математическими описаниями входных и выходных сигналов. Так, в автоматических системах входные и выходные сигналы с математической точки зрения представляют скалярные или векторные функции, в конечных автоматах – логические переменные, в системах массового обслуживания – потоки событий, в системах распознавания – изображения и др. образы. В стохастических системах входные и выходные сигналы считаются элементами произвольных абстрактных пространств.
Действие системы состоит в том, что данному элементу x пространства входных сигналов Х она ставит в соответствие некоторый элемент у пространства выходных сигналов Y.
Стохастической системой называется такая система, которая ставит в соответствие любому входному сигналу x€X определенное распределение вероятностей в пространстве выходных сигналов Y. Поведение стохастической системы описывается переходной вероятностью
μy = μ(Ey|x)
принадлежности выходного сигнала множеству Ey€Y при данном входном сигнале x€X. Функция μy называется условно вероятностной мерой или решающей функцией системы. При каждом x€X она представляет собой нормированную меру, определенную на некоторой σ – алгебре B множеств пространства Y, и при каждом множестве Ey€B является функцией переменной х, измеримой относительно σ – алгебры А пространства Х.
Решающая функция – это достаточно полная вероятностная характеристика стохастической системы. В приложениях часто ограничиваются менее полными характеристиками, например условными многомерными плотностями и характеристическими функциями, условными моментами различных порядков.
Стохастическая система называется физически возможной, если распределение значения ее выходного сигнала Y(t) в любой момент t не зависит от значений входного сигнала x(τ) при τ>t.
Пусть задан некоторый невозмущенный входной сигнал x(t) системы и пусть у(t) – соответствующий ему выходной сигнал, который назовем невозмущенным. Всякий другой сигнал x| (t) будем называть возмущенным входным сигналом, а соответствующий ему выходной сигнал – у| (t) – возмущенным выходным сигналом. Отклонение входного и выходного сигналов от невозмущенных определим как
Δ x(t)= x| (t)- x(t) и Δ у(t)= у| (t)- у(t).
Стохастическая система называется устойчивой относительно заданного невозмущенного сигнала почти наверное (с вероятностью 1), если отклонение ее выходного сигнала Δ Y(t) сколь угодно мало с вероятностью 1 при любом достаточно малом отклонении входного сигнала Δ x(t).
Стохастическая система называется устойчивой относительно заданного невозмущенного сигнала в р-среднем, p>0, если математическое ожидание M| Δ Y(t)|p остается сколь угодно малым при всех достаточно малых отклонениях входного сигнала Δ x(t). Из устойчивости почти наверно вытекает устойчивость по вероятности.
Наибольшее значение для приложений имеет понятие устойчивости почти наверное (устойчивость для всех реализаций происходящих в системе процессов). В практических задачах ограничиваются устойчивостью в среднем (р=1) и в среднем квадратическом (р=2).
При исследовании стохастических систем следует учитывать, что связи в этих системах в общем случае также являются стохастическими в смысле, что они могут случайно возникать и нарушаться в процессе работы системы.
Поток событий, управляющий случайными изменениями связей в сложной системе или изменением состояния системы, можно рассматривать как выходной сигнал некоторой стохастической системы и в то же время как дополнительную компоненту входного сигнала данной системы. Это дает возможность свести систему со случайными изменениями связей к последовательному соединению двух систем.
Пример. Рассмотрим системы со
случайно изменяющейся структурой. Ими