

4. Гибридная система
4.1. Определение гибридной системы
Гибридной системой называется математический объект
![]()
где: s – вектор переменных состояния размерности n ; f(s), g(s) – заданные вектор-функции или правая часть алгебро-дифференциального уравнения;
![]() ;
;
![]() ;
;![]()
![]() ,
,
![]() ,
,
со свойствами, обеспечивающими существование и единственность решения s(t).
Составляющие
вектора s1,
s2
называют дифференциальной и алгебраической
компонентами решения соответственно.
Учитывая, что любая неавтономная система
может быть приведена к автономной, мы
в дальнейшем не будем различать их, и
записывать правые части уравнений в
приведенной выше форме: S0
–
множество начальных условий, включающее
в себя все начальные условия, порождаемые
функций инициализации в процессе
функционирования гибридной системы;
![]() – булевская функция, определенная на
решениях алгебро-дифференциального
уравнения, выделяющей особые состояния,
или события, приводящие к смене поведения;
– булевская функция, определенная на
решениях алгебро-дифференциального
уравнения, выделяющей особые состояния,
или события, приводящие к смене поведения;![]() – булевская функция, определяющая
свойства решения;
– булевская функция, определяющая
свойства решения;![]() – вещественная функция, ставящая в
соответствие значению решения в правой,
конечной точке
– вещественная функция, ставящая в
соответствие значению решения в правой,
конечной точке![]() текущего промежутка интегрирования
значение новых начальных условий на
новом временном промежутке в его левой,
начальной точке
текущего промежутка интегрирования
значение новых начальных условий на
новом временном промежутке в его левой,
начальной точке![]() ;
;![]() – гибридное время.
– гибридное время.
В этом определении пояснения требуют два момента – необходимость введения системы алгебро-дифференциальных уравнений, вместо обсуждавшихся до сих пор систем дифференциальных уравнений, и новый термин – гибридное время. Начнем с последнего, так обоснование необходимости введения систем алгебро-дифференциальных уравнений будет дано при рассмотрении компонентных моделей.
4.2. Гибридное время
Ньютоновская модель времени родилась при формулировании законов классической механики. В представлении Ньютона время является самостоятельной сущностью реального мира, что позволяет говорить о его математических моделях. Ньютон различал:
• физическое (астрономическое) время:
«…относительное, кажущееся или обыденное время есть или точная, или изменчивая, постигаемая чувствами, внешняя, совершаемая при посредстве какого-либо движения, мера продолжительности, употребляемая в обыденной жизни вместо истинного математического времени, как-то час, день, месяц, год»;
• абсолютное (математическое) время:
«Абсолютное, истинное математическое время само по себе и по своей сущности, без всякого отношения к чему-либо внешнему, протекает равномерно и иначе называется длительностью».
Ньютоновское
время характеризуется непрерывным
направленным течением с постоянной
скоростью. Еще одно важное свойство
этой модели – абсолютность времени,
позволяющая синхронизировать все
параллельно протекающие процессы.
Математической моделью ньютоновского
времени является вещественная ось, по
которой с постоянной скоростью пробегает
переменная t
(время), двигаясь из прошлого в будущее,
в пределах от –![]() до +
.
до +
.
С непрерывным временем неразрывно связаны обыкновенные дифференциальные уравнения, применяющиеся для описания непрерывных во времени процессов. В обыкновенных дифференциальных уравнениях, время – это единственная независимая переменная, от которой зависит положение точки x(t) .
![]() ,
,
![]() .
.
Если мы перейдем от неавтономной к автономной системе, в которой время t трактуется как координата:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
то в новой записи в явном виде появится уравнение «часов».
В абсолютном непрерывном времени не возникает проблем с синхронизацией параллельно протекающих процессов. При рассмотрении многих реальных физических процессов часто отказываются от свойства непрерывности времени и вводят дискретное время. Под дискретным временем понимают любую упорядоченную, неограниченно возрастающую последовательность вещественных или рациональных чисел, а чаще всего множество целых чисел.
Аналогично
тому, как непрерывное время является
независимой переменной в дифференциальных
уравнениях, дискретное время
![]() играет роль независимой переменной в
разностных уравнениях.
играет роль независимой переменной в
разностных уравнениях.
Говоря
о разностных уравнениях, мы будем
считать, что некоторая функция z(t)
определена только в точках сетки
![]() ,
поэтому она и получила название сеточной.
Сеточные функции и разностные уравнения
в моделировании возникают как аппроксимации
исследуемых непрерывных зависимостей.
,
поэтому она и получила название сеточной.
Сеточные функции и разностные уравнения
в моделировании возникают как аппроксимации
исследуемых непрерывных зависимостей.
Дискретное время, наряду со временем непрерывным, естественным образом появляется там, где наблюдается разделение поведения на «быстрые» (дискретные или мгновенные действия) и «медленные» (непрерывные или длительные) действия. Примером может служить «быстрый» цифровой регулятор (УУ), управляющий движением «медленного» непрерывного объекта (ОУ) (рис 14), где Y – «непрерывная» координата объекта, Ym – ее квантованное значение, полученное с измерительного прибора, а U – управляющий сигнал.
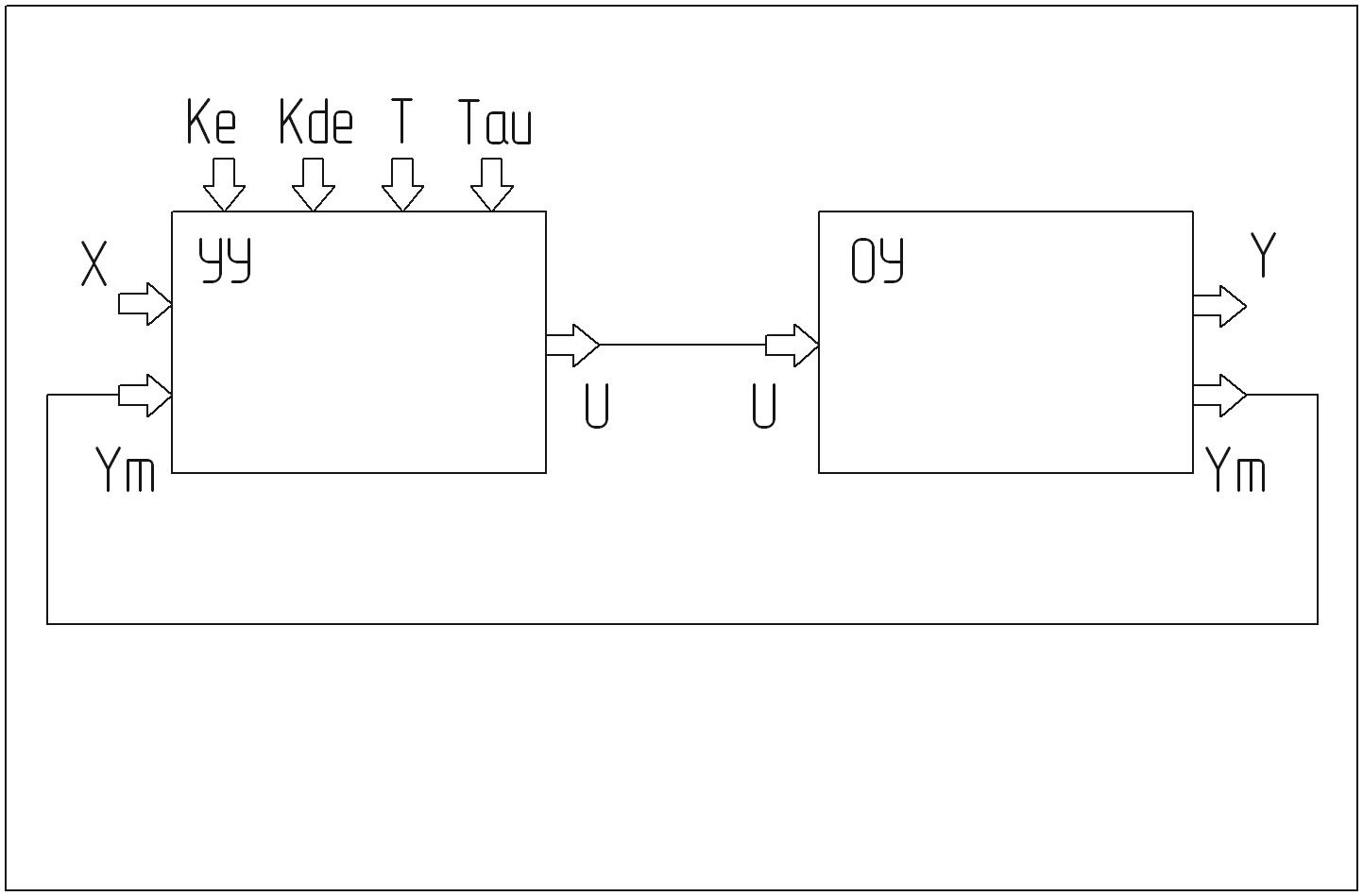
Рис. 14. Функциональная схема устройства, состоящего из управляющего
устройства (УУ) и объекта управления (ОУ), охваченных
обратной связью
В этом случае при описании совместной системы «объект-регулятор» возникают одновременно дифференциальные (уравнения объекта).
![]()
и разностные уравнения (уравнения регулятора)
![]() ,
,
![]() ,
,
![]() ,
,
образующие совместную систему дифференциально-разностных уравнений (объект-регулятор):
где
y(t)
– вектор, характеризующий состояние
объекта управления, а
![]() – управляющее воздействие.
– управляющее воздействие.
В
этом примере мы явным образом сталкиваемся
с комбинированным способом описания
времени, в виде последовательных
отрезков, внутри которых наблюдаем
длительные действия с конечными
скоростями, и последовательности точек,
где все действия совершаются с бесконечной
скоростью. Однако эта последовательность
может превращаться в конечное множество
и даже в один единственный полуоткрытый
справа интервал
![]() ,
в случае, если гибридная система
вырождается в классическую динамическую
систему.
,
в случае, если гибридная система
вырождается в классическую динамическую
систему.
Естественным образом такую последовательность отрезков назвать гибридным временем, добавив в нее «временные щели» (time gap) – отрезки нулевой длительности, в которых (и только в которых!) переменные могут меняться скачками.