

5.2. Вырожденное поведение
Одной из «крайних» форм существования примитивного гибридного автомата, как уже отмечалось, является его «вырождение» в классическую динамическую систему, когда первое же выбранное начальное условие приводит к решению, на котором всегда истинен инвариант и всегда ложен предикат, приводящий к смене начальных условий.
Для дифференциального уравнения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
при
выборе любого
![]() написанный предикат никогда не будет
истинным, и построенный таким образом
гибридный автомат будет вести себя как
классическая динамическая система.
написанный предикат никогда не будет
истинным, и построенный таким образом
гибридный автомат будет вести себя как
классическая динамическая система.
Второй вариант «крайнего» поведения реализуется, если на всем множестве начальных условий одновременно истинен инвариант и предикат, приводящий к смене начальных условий. В этом случае примитивный гибридный автомат можно интерпретировать как конечный, реализующий заданное дискретное отображение. Обычно такое поведение считают недопустимым, так непрерывное время в таком автомате перестает двигаться, то есть все длительные промежутки превращаются в интервалы нулевой длительности (в гибридном времени, мы наблюдаем бесконечное течение дискретного времени и все процессы становятся мгновенными).
Так,
для приведенного выше дифференциального
уравнения при выборе начального условия
в виде
![]() написанный предикат становится истинным
уже на начальном условии, и если положить
написанный предикат становится истинным
уже на начальном условии, и если положить![]() ,
то построенный таким образом гибридный
автомат будет вести себя тождественное
дискретное отображение.
,
то построенный таким образом гибридный
автомат будет вести себя тождественное
дискретное отображение.
Однако возможен и третий случай, когда гибридная система сначала демонстрирует чередование длительных и мгновенных действий, но начиная с некоторого момента начинает вести себя как чисто дискретная система.
5.3. Гибридный автомат с несколькими длительными состояниями
В большинстве языков моделирования гибридный автомат вводится как автомат с несколькими состояниями (рис. 16).

Рис. 16. Гибридный автомат с несколькими длительными состояниями
Граф, соответствующий гибридной системе с несколькими длительными состояниями, с приписанными узлам системами дифференциальных уравнений и дугами, помеченными предикатами функциями инициализации, называется картой поведения или гибридным автоматом.
Так для электрической цепи с переменным сопротивлением, рассмотренной в разд. 2.1 в карту поведения (рис.17) включим два состояния, которым припишем системы уравнений «Система_уравнений_1» и «Система_уравнений_2» с одинаковым набором уравнений. В раздел “Внутренние переменные” включим переменное сопротивление, которое обозначим через R. Сопротивление R при переходе цепи из состояния из одного состояния в другое, будем приравнивать к сопротивлению R1, значение которого будет измениться во время переходов.
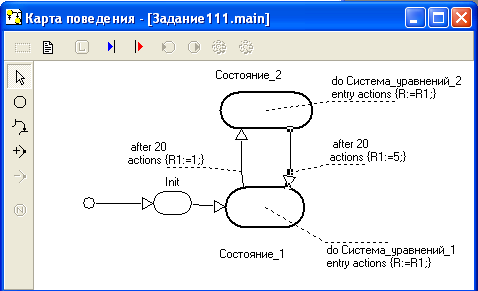
Рис. 17. Карта поведения электрической цепи с переменным сопротивлением
Условия срабатывания переходов (интервалы времени, через которые происходит переключение значений сопротивления R1) зададим одинаковыми, например 20 единиц времени.
Рассмотрим модель математического маятника с односторонней пружиной.
Данная модель является примером модели изолированной гибридной системы с гибридным поведением второго, более сложного типа – изменяющиеся правые части уравнений при неизменных наборе уравнений и наборе переменных. Предположим, что маятник снабжен пружиной, которая работает только в области отрицательных значений угла. Тогда уравнения движения маятника примут вид

Уравнения,
содержащие выражения вида
![]() ,
называются условными или гибридными.
Такое уравнение неявно определяет два
дискретных события, связанных с
переключением ветвей условного выражения.
Любые гибридные уравнения можно
представить в виде гибридной карты
состояния (но не наоборот). Например,
гибридную систему уравнений можно
представить картой состояний, изображенной
на Рис. 18.
,
называются условными или гибридными.
Такое уравнение неявно определяет два
дискретных события, связанных с
переключением ветвей условного выражения.
Любые гибридные уравнения можно
представить в виде гибридной карты
состояния (но не наоборот). Например,
гибридную систему уравнений можно
представить картой состояний, изображенной
на Рис. 18.
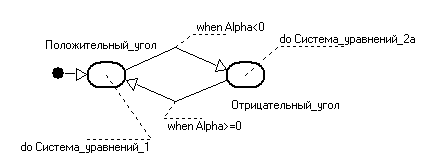
Рис. 18. Карта состояния математической модели маятника с односторонней пружиной
Обычно пользователю бывает проще и естественнее написать систему уравнений, нежели рисовать эквивалентную карту состояний. Поэтому пакеты гибридного моделирования обычно включают условные уравнения в качестве допустимых конструкций входного языка и определяют моменты соответствующих дискретных событий (точки переключения) автоматически.
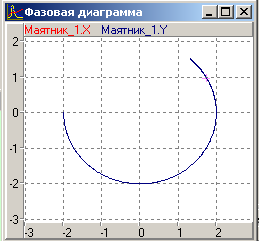
Зависимости
![]() показаны на рис. 19а. Траектория
движения показана на рис. 19б. Траектория
несимметрична, поскольку в начальном
положении пружина сжата и потенциальная
энергия маятника больше. Фазовая
траектория в координатах
показаны на рис. 19а. Траектория
движения показана на рис. 19б. Траектория
несимметрична, поскольку в начальном
положении пружина сжата и потенциальная
энергия маятника больше. Фазовая
траектория в координатах![]() показана на Рис. 19в.
показана на Рис. 19в.

а)

б) в)
Рис. 19. Временные и фазовые диаграммы
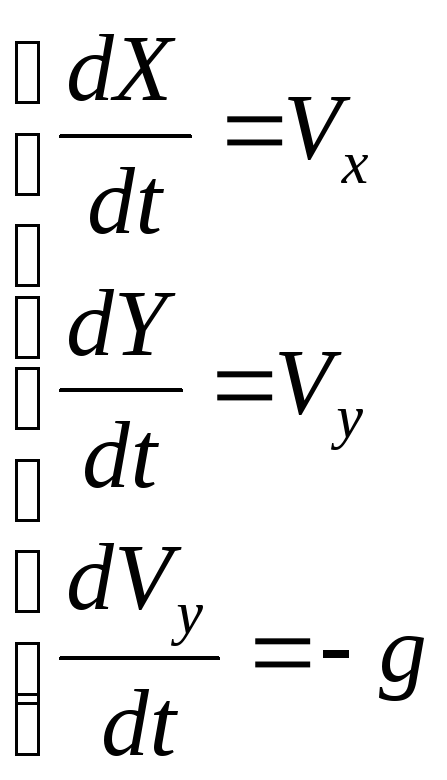
В качестве еще одного примера рассмотрим модель отрывающегося маятника. Это модель изолированной системы с несколькими качественными состояниями и с гибридным поведением сложного типа, когда меняются и система уравнений, и набор переменных.
 Пусть
в некоторый момент
Пусть
в некоторый момент![]() (например, определяемый условием
(например, определяемый условием![]() )
крепление шарика к стержню разрушается
и далее шарик продолжает свое независимое
от стержня движение. Движение шарика
после отрыва задается системой уравнений:
)
крепление шарика к стержню разрушается
и далее шарик продолжает свое независимое
от стержня движение. Движение шарика
после отрыва задается системой уравнений:
Гибридная
карта состояний для отрывающегося
маятника показана на рис.20. Система
имеет два основных качественных
состояния: «Колебания» и «Свободный_полет».
Кроме того, предусмотрена остановка
эксперимента, когда шарик улетит ниже
некоторого
![]() – переход в конечное состояние «Останов».
В состоянии «Колебания» решается система
уравнений (1) и определяются значения
переменных
– переход в конечное состояние «Останов».
В состоянии «Колебания» решается система
уравнений (1) и определяются значения
переменных![]() .
В момент отрыва происходит переход в
состояние «Свободный_полет», в котором
решается система уравнений (3) и
определяются значения переменных
.
В момент отрыва происходит переход в
состояние «Свободный_полет», в котором
решается система уравнений (3) и
определяются значения переменных![]() .
Начальными значениями переменныхx
и y
в системе уравнений (3) становятся их
текущие значения на момент времени
.
Начальными значениями переменныхx
и y
в системе уравнений (3) становятся их
текущие значения на момент времени
![]() ,
а начальные значения линейных скоростей
,
а начальные значения линейных скоростей![]() и
и![]() ,
которые не входили в систему уравнений
(1), определяются в мгновенных действиях
перехода.
,
которые не входили в систему уравнений
(1), определяются в мгновенных действиях
перехода.
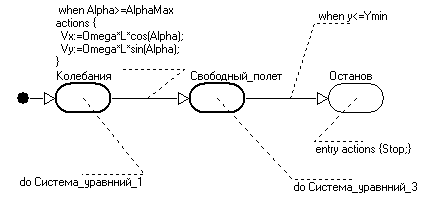
Рис.20. Гибридная карта состояний для отрывающегося маятника
Во
входных действиях состояния «Останов»
вызывается предопределенная процедура
Stop,
которая прекращает продвижение модельного
времени. Если бы эта процедура не
вызывалась, то после перехода в состояние
«Останов», поскольку этому состоянию
не приписано никакой системы уравнений
или карты состояний, значения всех
переменных будут оставаться неизменными,
а изменяться будет только значение
модельного времени. На Рис. показана
траектория движения маятника при
![]() .
.
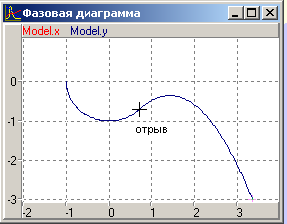
Рис. 21. Траектория движения отрывающегося маятника