

5.5.7. Разностно-дискретная модуляция (рдм)
Разностно-дискретная модуляция представляет собой передачу положительного или отрицательного импульса, соответствующего знаку приращения квантованной функции, а также отсутствие сигнала при постоянстве квантованной функции [10]. При РДМ используется обычное квантование. Временные диаграммы процедуры РДМ показаны на рис. 5.8.
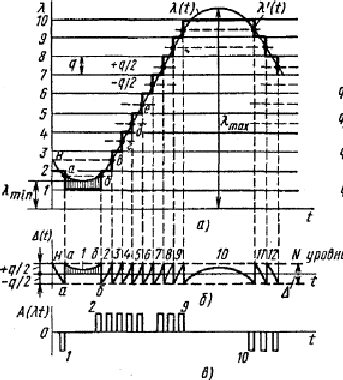
Рис. 5.8. Квантование сообщения по уровню:
а – квантование с постоянным шагом; б – погрешности квантования;
в – сигналы при разностно-дискретной модуляции
При переходе на более высокий уровень передается сигнал о единичном скачке вверх, а при переходе на более низкий уровень – сигнал о скачке вниз. Если сообщение не изменяет значения, сигнал отсутствует; на рисунке показано, что между импульсами1и2, а также9 и10 сигнала нет.
Разница между Δ-модуляцией и РДМ заключается в следующем.
1. При РДМ используется обычное квантование по уровню, а при Δ-модуляции – более сложное дифференциальное квантование.
2. Если при Δ-модуляции сигналы передаются периодически через равные промежутки времени Δt, то при РДМ – только в моменты изменения сообщения при переходе с одного дискретного уровня на другой. Таким образом, при медленно изменяющихся сообщениях РДМ-сигналы будут передаваться редко в отличие от Δ-модуляции, где они должны следовать через шаг квантования Δt. Преимущество РДМ состоит также в том, что ее применение для многоканальной системы телеизмерения позволяет увеличить быстродействие всей системы по сравнению, например, с такой же многоканальной кодоимпульсной системой. Это объясняется тем, что передача показаний каждого телеизмерения осуществляется не кодовой комбинацией, а одним импульсом, на что тратится меньше времени.
Недостатком РДМ является возможность появления и накопления ошибки в результате искажения кодового импульса. Этот недостаток настолько существен, что РДМ приходится применять в комбинации с КИМ.
5.5.8. Лямбда-дельта-модуляция
Этот вид модуляции вначале был предложен как λ-Δ-преобразование. Сначала непрерывная функция λ(t) квантуется по уровню и по времени [10]. Возможный результат такого квантования представлен на рис. 5.9, а.

Рис. 5.9.Временные диаграммы λ-Δ-модуляции:
а – функция сообщения после квантования по уровню и по времени; б – передача квантованной функции методом λ-Δ-модуляции
Квантованная ступенчатая функция передается таким образом: значение функции λ'(t) в первом интервале передается положительным импульсом с уровнем 1 в течение времени Δt (рис. 5.10, б). Сообщение о том, что до точки а квантованная функция не изменяется (рис. 5.10, а), передается дополнительным импульсом с отрицательным уровнем «-1». Переход функции на уровень 3 (в точке а) передается импульсом, амплитуда которого равна уровню 3.
Отсутствие изменения функции до точки б вновь передается уровнем «-1». Таким образом, передача осуществляется только в моменты изменения состояния функции. Такая передача особенно эффективна в случае, если сообщения мало изменяются во времени.
Использование уровня «-1» применяется для контроля исправности линии связи. Если эта процедура не применяется, то линия связи оказывается большую часть времени свободной и её можно использовать для передачи другой информации. В отличие от Δ-модуляции здесь передается не приращение функции, а полное значение, что устраняет возможность накопления ошибки.