

01_Физические_основы_механики
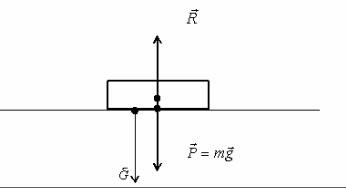
.pdfРис. 2.3. Сила тяжести
Пусть выполняется условие h << Rз . В этом случае
F =γ |
mM |
з |
γM |
|
|
|
= m |
|
з . |
||
R2 з |
|
R2 |
|||
|
|
|
з |
||
Выражение в скобках есть константа, имеющая смысл ускоре-
ния
g = |
γM з |
= 9,81 |
м |
. |
R2 з |
|
|||
|
|
с2 |
||
Величина g называется ускорением свободного падения. Сле-
довательно, можем записать
F= mg.
Всистеме отсчета, связанной с Землей, на всякое тело массой m, находящейся вблизи поверхности Земли, действует сила тя-
жести
P = mgr, P = mg.
Вектор gr и, следовательно, вектор P направлены по радиусу Земли к ее центру, т.е. вертикально вниз.
50
Вес тела
Пусть тело массой m лежит на горизонтальной опоре. На тело
действуют: сила тяжести P со стороны Земли, сила реакции R опоры, обусловленная упругими свойствами опоры.
Рис. 2.4. Вес тела
Обе силы P и R приложены к телу. Обе силы P и R приложены к телу. Точкой приложения силы P является центр масс
тела, сила R приложена к точке на границе соприкосновения тела и опоры.
По третьему закону Ньютона на опору со стороны тела дейст-
вует сила, которую обозначим G . Очевидно
G = −R .
Сила, с которой тело действует на опору, называется весом тела.
Найдем связь между силой тяжести rи весом. Пусть опора вместе с телом движется с ускорением a . Запишем второй закон Ньютона для тела
mgr + R = mar, mgr + (−G)= mar,G = mgr −mar.
Очевидно, что если ускорение равно нулю, то ar = 0,G = mgr.
Вес и сила тяжести приложены к различным телам.
51

Сила упругости
Всякое тело под действием сил изменяет свою форму и размеры или деформируется. В деформированном теле возникают упругие силы, действие которых приводит к уменьшению деформации.
Цилиндрическая пружина
Рассмотрим цилиндрическую пружину, расположенную вдоль оси x , один конец которой закреплен. Проекция свободного конца пружины совпадает с началом оси x точкой O.
Рис. 2.5. Цилиндрическая пружина
Приложим к свободному концу пружины силу F , направленную вдоль оси x . Под действием этой силы пружина растягивается или сжимается, т.е. деформируется.
Пусть x –координата свободного конца пружины.
Величина x называется деформацией пружины, причем, если x > 0, то происходит растяжение пружины, а при x < 0 происходит сжатие пружины. Если деформированную пружину отпустить, то она возвращается в недеформированное состояние в результате действия силы упругости.
52

Рис. 2.6. Сила упругости при деформации цилиндрической пружины
Сила упругости при достаточно малых деформациях подчиня-
ется закону Гука
Fу = −kx ,
где Fу – проекция на ось x силы упругости, возникающей при де-
формации пружины; k – жесткость пружины, Нм ; x – дефор-
мация пружины. Знак минус указывает на то, что вектор силы упругости направлен так, что под действием силы упругости пружина стремится вернуться в недеформированное состояние.
Однородный стержень (сжатие, растяжение)
Пусть однородный стержень в свободном состоянии имеет длину l0 . Приложим к его концам направленные вдоль его оси
силы F1 = F2 = F . Обозначим ± ∆l – изменение длины стержня,
«плюс» – при растяжении, «минус» – при сжатии.
Относительной деформацией называется безразмерная ве-
личина, равная
ε = ± ∆l , l0
53

где l0 – длина стержня в недеформированном состоянии.
а)
б)
Рис. 2.7. Растяжение (а) и сжатие (б) стержня
Обозначим Sn – площадь сечения стержня, перпендикулярно-
го направлению силы.
Нормальным напряжением, возникающим в деформированном стержне, называется скалярная величина, равная
σ = |
F |
, |
Н |
= Па. |
|
м2 |
|||
|
Sn |
|
||
|
54 |
|
||
Из опыта известно, что относительная деформация пропорциональна силе, приходящейся на единицу площади поперечного сечения стержня
ε = E1 σ ,
где Е – характеристика упругих свойств материала – модуль Юн-
га, |
Н |
= Па. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
м2 |
|
|
|
|
|
|
|
|
|
|
Запишем |
F |
|
∆l |
|
Sn E |
|
Sn E |
|
|
|
σ = εE, |
= |
E, F = |
∆l, k = |
, F = k∆l. |
|||||
|
|
l |
l |
l |
||||||
|
|
|
Sn |
|
|
|
||||
Можно еще записать выражения
F = εE, F = EεSn . Sn
Деформация сдвига
Возьмем однородное тело в форме прямоугольного параллелепипеда, к противолежащим граням которого приложены две силы, направленные параллельно этим граням в противополож-
ные стороны Fr1 = −Fr2 , F1 = F2 = F. В любом сечении, параллельном этим граням, возникает тангенциальное напряжение
τ = F , Н2 = Па,
Sτ м
где Sτ – площадь грани.
55

Рис. 2.8. Деформация сдвига
В качестве характеристики деформации сдвига используется величина
γ = tgϕ = ba .
Смысл a и b ясен из рисунка. При упругих деформациях угол ϕ обычно очень мал, так что tgϕ ≈ϕ, рад, γ ≈ϕ . Величина γ
называется относительным сдвигом.
Из опыта известно, что относительный сдвиг пропорционален тангенциальному напряжению
γ = G1 τ,
где G – модуль сдвига, мН2 = Па.
Сила трения
Сила трения возникает при перемещении соприкасающихся тел или их частей относительно друг друга. Трение между поверхностями двух твердых тел при отсутствии смазки между ними называется сухим. Трение между твердым телом и жидкой или газообразной средой называется вязким.
Сухое трение
Пусть некоторое тело скользит по поверхности. При этом в точках соприкосновения тела и поверхности возникает сила сухо-
56

го трения или трения скольжения. Сила трения при этом на-
правлена вдоль соприкасающихся поверхностей так, чтобы препятствовать смещению этих поверхностей.
Из опыта известно, что величина силы сухого трения пропорциональна силе реакции опоры
Fтр = µR , 0 < µ <1.
Здесь µ – коэффициент трения скольжения, безразмерная
величина, значение которой определяется экспериментально. Рассмотрим тело, скользящее вниз по наклонной плоскости с углом наклона, равным α .
Рис. 2.9. Сила трения скольжения
Рис. 2.10. Движение тела на наклонной плоскости
57
Записав уравнение второго закона Ньютона, можно получить для силы реакции опоры и силы трения
R = mg cosα , Fтр = µmg cosα .
Вязкое трение и сопротивление среды
При движении тела в газе или жидкости на поверхность тела действует сила вязкого трения. Суммарное действие сил трения на все участки поверхности тела, соприкасающиеся с газом или жид-
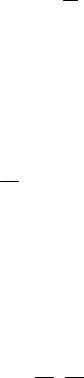
костью, приводит к появлению силы сопротивления среды Fc .
Рис. 2.11. Движение тела в среде
Принебольшихскоростяхдвижениятела Frc = −µ1Vr, Fc = µ1V .
При больших скоростях F |
= −µ V 2 er |
, |
F |
= µ V 2 . |
|
c |
2 |
V |
|
c |
2 |
Здесь µ1 , µ2 – коэффициенты сопротивления среды, кото-
рые зависят от свойства среды, формы и размеров тела и определяются экспериментально.
2.6. Принцип относительности Галилея
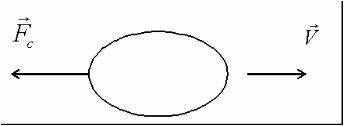
Рассмотрим две системы отсчета, движущиеся относительно друг друга с постоянной скоростью u : инерциальная система отсчета K′ движется равномерно и прямолинейно относительно
58
инерциальной системы |
K . |
|
Пусть оси x |
и x′ систем координат |
||||||
|
|
|
|
|
′ |
z, z |
′ |
все время остаются параллельными. |
||
совпадают, а оси y, y , |
|
|||||||||
|
Возьмем за t = 0 |
момент времени, в который начала систем |
||||||||
координат O |
и O′ |
совпадали. Для некоторой точки М запишем |
||||||||
r |
r |
r |
|
есть перемещение |
точки O′ за время t . |
|||||
r |
′ = r |
+ut , где ut |
||||||||
Спроецируем |
уравнение |
|
на оси систем отсчета |
K иK′: |
||||||
x = x |
′ |
+ut, y |
′ |
|
′ |
|
|
выражения |
называются |
|
|
= y , z |
= z . Полученные |
||||||||
преобразованиями Галилея. Возьмем элементарное приращение обеих частей и разделим на dt :
r |
r′ |
|
dr |
|
dr |
′ |
r |
dr |
= dr |
+udt, |
|
= |
|
|
+ u. |
dt |
dt |
|
В классической механике выполняется следующее условие: во всех системах отсчета время течет одинаково t = t′.
Рис.2.12. Вывод преобразований Галилея
Запишем
′ |
dr |
|
dr ′ |
r |
|
|
dt = dt , |
|
|
= |
|
+u |
, |
dt |
|
dt′ |
||||
|
59 |
|
|
|
|
|