

6.4.3.3. Применение катушки со сталью при синусоидальном напряжении питания
Катушки с ферромагнитным магнитопроводом, специально предназначенные для создания постоянной или изменяемой индуктивности, называются дросселями. Дроссели применяют в цепях переменного тока для регулирования тока. Использование для этой цели резистора экономически невыгодно из-за увеличения мощности потерь (RI02). В дросселях мощность потерь в проводах обмотки и в магнитопроводе незначительна, а сравнительно большая индуктивность позволяет эффективно ограничивать или регулировать ток в цепи. Примером регулируемой индуктивности при помощи изменяемого воздушного зазора может служить дроссель, включаемый для регулирования сварочного тока в электрическую цепь сварочного трансформатора.
П утём
измерений или расчёта магнитной цепи
может быть построена вольт-амперная
характеристикаU(I0)
катушки c зазором в магнитопроводе (рис.
6.40, а).
При увеличении синусоидального напряжения
на зажимах катушки должен увеличиваться
её магнитный поток. При насыщении
сердечника ток катушки будет возрастать
быстрее, чем магнитный поток и напряжение.
утём
измерений или расчёта магнитной цепи
может быть построена вольт-амперная
характеристикаU(I0)
катушки c зазором в магнитопроводе (рис.
6.40, а).
При увеличении синусоидального напряжения
на зажимах катушки должен увеличиваться
её магнитный поток. При насыщении
сердечника ток катушки будет возрастать
быстрее, чем магнитный поток и напряжение.
В тех случаях, когда магнитопровод не насыщен, магнитное сопротивление воздушного зазора RM = /0S (несмотря на малую величину зазора) оказывается значительно больше магнитного сопротивления RM1 = lM/0S ферромагнитной части магнитопровода. Это позволяет пренебречь величиной RМ1. Тогда выражение индуктивности цепи примет вид:
|
L = w20S /( + lM/) w20S/. |
(6.20) |
Выражение (6.20) позволяет сделать следующие выводы:
1) при увеличении воздушного зазора индуктивность L (см. рис. 6.40, б) и индуктивное сопротивление ХL = wL катушки уменьшаются, вследствие чего при неизменном действующем на зажимах катушки переменном напряжении ток дросселя возрастает;
2) Регулируя величину воздушного зазора в магнитопроводе, можно установить нужное значение переменного тока в индуктивной катушке при неизменном значении подводимого к дросселю напряжения.
6.5.1.1.Понятие о цепях с подмагничиванием
В §6.4 было показано, что индуктивность катушки можно изменять, регулируя длину воздушного зазора в магнитопроводе. Большое применение в разных областях техники получили устройства (управляемые дроссели, магнитные усилители, стабилизаторы напряжения и др.), у которых используется другой способ изменения индуктивности (индуктивного сопротивления) катушки со сталью, заключающийся в подмагничивании её сердечника дополнительной катушкой, питаемой постоянным током.
|
6.5.1.2. Управляемый дроссель Простейшая управляемая нелинейная индуктивная катушка (управляемый дроссель) изображена на рис. 6.41. Она состоит из двух обмоток w1 и w0, намотанных на ферромагнитный сердечник. Площадь поперечного сечения сердечника SМ (м2), длина средней магнитной линии lМ (м).
О
Если
пренебречь относительно небольшим
активным сопротивлением обмотки w1
и потерями мощности в сердечнике, то
синусоидальное напряжение u
уравновешивает ЭДС самоиндукции,
взятой с обратным знаком:
где Фm = Um /(w1) – амплитуда переменной составляющей магнитного потока; Ф0 – постоянная составляющая переменного потока. Принцип управления переменным током i путём изменения постоянного тока I0 в обмотке w0 поясним с помощью рис. 6.42, а и б, на которых кривые Ф(НlM) представляют собой зависимости потока в сердечнике от суммарной МДС (магнитного напряжения) НlM = H1MlM + H0lM = F = w1I + w0I0.
П Проведём прямую а - б (рис. 6.42, б) так, чтобы среднее значение тока i за период от t = 0 до t = 2 было равно нулю, т. е. чтобы заштрихованные площади кривой w1i выше и ниже этой оси были одинаковыми. Прямая а - б является нулевой линией для кривой w1i = f(t) и удалена от оси ординат на расстояние F0 = w0I0. Анализ кривых w1i показывает, что при Ф0 ≠ 0 кривая переменного тока несимметрична относительно оси времени, содержит первую и высшие гармоники, амплитуды которых зависят как от амплитуды Фm, так и от постоянной МДС F0 = w0I0: чем больше w0I0, тем больше амплитуды гармоник тока i: первой I1m = H1MlM / w1, второй I2m = H2MlM / w1 и т. д. | |
| |
|
6.5.1.2. Управляемый дроссель Простейшая управляемая нелинейная индуктивная катушка (управляемый дроссель) изображена на рис. 6.41. Она состоит из двух обмоток w1 и w0, намотанных на ферромагнитный сердечник. Площадь поперечного сечения сердечника SМ (м2), длина средней магнитной линии lМ (м).
О
Если
пренебречь относительно небольшим
активным сопротивлением обмотки w1
и потерями мощности в сердечнике, то
синусоидальное напряжение u
уравновешивает ЭДС самоиндукции,
взятой с обратным знаком:
где Фm = Um /(w1) – амплитуда переменной составляющей магнитного потока; Ф0 – постоянная составляющая переменного потока. Принцип управления переменным током i путём изменения постоянного тока I0 в обмотке w0 поясним с помощью рис. 6.42, а и б, на которых кривые Ф(НlM) представляют собой зависимости потока в сердечнике от суммарной МДС (магнитного напряжения) НlM = H1MlM + H0lM = F = w1I + w0I0.
П Проведём прямую а - б (рис. 6.42, б) так, чтобы среднее значение тока i за период от t = 0 до t = 2 было равно нулю, т. е. чтобы заштрихованные площади кривой w1i выше и ниже этой оси были одинаковыми. Прямая а - б является нулевой линией для кривой w1i = f(t) и удалена от оси ординат на расстояние F0 = w0I0. Анализ кривых w1i показывает, что при Ф0 ≠ 0 кривая переменного тока несимметрична относительно оси времени, содержит первую и высшие гармоники, амплитуды которых зависят как от амплитуды Фm, так и от постоянной МДС F0 = w0I0: чем больше w0I0, тем больше амплитуды гармоник тока i: первой I1m = H1MlM / w1, второй I2m = H2MlM / w1 и т. д. | |
|
 бмоткаw1
включена в цепь переменного тока, и
по ней протекает переменный ток i,
содержащий первую и высшие гармоники.
Обмотка
управления (подмагничивания)
w0
подключена к источнику постоянного
напряжения U0
последовательно с потенциометром R0.
По обмотке w0
протекает постоянный ток I0
U0
/
R0.
Для
ограничения в обмотке w0
переменного тока, вызванного
индуктированной переменным магнитным
потоком ЭДС, в неё включена дополнительная
катушка с индуктивностью L0.
бмоткаw1
включена в цепь переменного тока, и
по ней протекает переменный ток i,
содержащий первую и высшие гармоники.
Обмотка
управления (подмагничивания)
w0
подключена к источнику постоянного
напряжения U0
последовательно с потенциометром R0.
По обмотке w0
протекает постоянный ток I0
U0
/
R0.
Для
ограничения в обмотке w0
переменного тока, вызванного
индуктированной переменным магнитным
потоком ЭДС, в неё включена дополнительная
катушка с индуктивностью L0.
 остроения
на рис. 6.42,а
соответствуют случаю, когда I0
= 0
(Ф0
=
0), а на рис. 6.42, б
– когда I0
≠
0
(Ф0
≠ 0).
На обоих рисунках переменная составляющая
потока Фmsint
одинакова. Кривые F
= HlM
=
w1i
+ w0I0
= f(t)
построены с учетом значения Ф0.
Ось времени для этих кривых направлена
вертикально вниз. Ток i
не содержит постоянной составляющей,
т. к. в цепи обмотки w1
нет источника постоянной ЭДС и
выпрямителей.
остроения
на рис. 6.42,а
соответствуют случаю, когда I0
= 0
(Ф0
=
0), а на рис. 6.42, б
– когда I0
≠
0
(Ф0
≠ 0).
На обоих рисунках переменная составляющая
потока Фmsint
одинакова. Кривые F
= HlM
=
w1i
+ w0I0
= f(t)
построены с учетом значения Ф0.
Ось времени для этих кривых направлена
вертикально вниз. Ток i
не содержит постоянной составляющей,
т. к. в цепи обмотки w1
нет источника постоянной ЭДС и
выпрямителей. 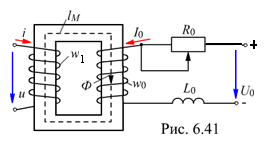 бмоткаw1
включена в цепь переменного тока, и
по ней протекает переменный ток i,
содержащий первую и высшие гармоники.
Обмотка
управления (подмагничивания)
w0
подключена к источнику постоянного
напряжения U0
последовательно с потенциометром R0.
По обмотке w0
протекает постоянный ток I0
U0
/
R0.
Для
ограничения в обмотке w0
переменного тока, вызванного
индуктированной переменным магнитным
потоком ЭДС, в неё включена дополнительная
катушка с индуктивностью L0.
бмоткаw1
включена в цепь переменного тока, и
по ней протекает переменный ток i,
содержащий первую и высшие гармоники.
Обмотка
управления (подмагничивания)
w0
подключена к источнику постоянного
напряжения U0
последовательно с потенциометром R0.
По обмотке w0
протекает постоянный ток I0
U0
/
R0.
Для
ограничения в обмотке w0
переменного тока, вызванного
индуктированной переменным магнитным
потоком ЭДС, в неё включена дополнительная
катушка с индуктивностью L0.
 остроения
на рис. 6.42,а
соответствуют случаю, когда I0
= 0
(Ф0
=
0), а на рис. 6.42, б
– когда I0
≠
0
(Ф0
≠ 0).
На обоих рисунках переменная составляющая
потока Фmsint
одинакова. Кривые F
= HlM
=
w1i
+ w0I0
= f(t)
построены с учетом значения Ф0.
Ось времени для этих кривых направлена
вертикально вниз. Ток i
не содержит постоянной составляющей,
т. к. в цепи обмотки w1
нет источника постоянной ЭДС и
выпрямителей.
остроения
на рис. 6.42,а
соответствуют случаю, когда I0
= 0
(Ф0
=
0), а на рис. 6.42, б
– когда I0
≠
0
(Ф0
≠ 0).
На обоих рисунках переменная составляющая
потока Фmsint
одинакова. Кривые F
= HlM
=
w1i
+ w0I0
= f(t)
построены с учетом значения Ф0.
Ось времени для этих кривых направлена
вертикально вниз. Ток i
не содержит постоянной составляющей,
т. к. в цепи обмотки w1
нет источника постоянной ЭДС и
выпрямителей.