

6. Устройство и расчет канатных подвесных установок. Область применения.
Канатные установки применяются на трелевке, штабелевке, погрузке и разгрузке лесоматериалов, а также на других транспортных операциях, связанных с перемещением материалов по лесосеке и складу. Канатная установка состоит из лебедки и различных устройств и приспособлений (стрелы, мачты, оттяжек, блоков), обеспечивающих более благоприятные условия перемещения груза. Характерная особенность канатных установок заключается в том, что подъем и горизонтальное перемещение груза выполняется с помощью стальных канатов, наматываемых на барабаны лебедки.
Двухмачтовые (однопролетные) канатные установки перемещают груз в подвесном положении. К ним относятся кабель-краны и бревносвалы Применяются также двухмачтовые установки, перемещающие груз в полуподвесном положении, т. е. когда один конец груза располагается на неподвижной опоре, а другой приподнят над ней. Многопролетная канатная установка перемещает груз, как правило, в подвесном положении.
Одномачтовая канатная установка. Такая установка (рис. 6.4, а) применяется при наземном и полуподвесном способе трелевки лесоматериалов. Особенность ее работы состоит в том, что груз, находясь далеко от мачты, перемещается волоком. По мере приближения его к мачте под действием вертикальной составляющей натяжения грузового каната передний конец его поднимается над опорой. В этом положении груз перемещается к мачте. При трелевке лесоматериалов с приподнятым концом уменьшается сопротивление движению и отсутствует лобовое сопротивление, так как подвешенный конец, встречаясь с препятствиями, отклоняется в сторону.
У одномачтовых канатных установок длина провисающей части грузового каната Ln (рис. 6.4,6) определяется по формуле
![]()
где Н —
высота мачты; ![]() —вес
1 м грузового каната;Q —
вес перемещаемого груза;
—вес
1 м грузового каната;Q —
вес перемещаемого груза; ![]() —
коэффициент сопротив
—
коэффициент сопротив
ления
движению груза по опоре; ![]() —
угол наклона опоры;Т —
тяговое усилие грузового каната.
—
угол наклона опоры;Т —
тяговое усилие грузового каната.
Как видно из этой формулы, с увеличением высоты мачты И возрастает величина пролета провисающей части грузового каната Ln. Одномачтовые канатные установки применяются для трелевки на расстояние до 500 м, поэтому при высоте мачты в 15. ..20 м большая часть длины грузового каната находится на весу и не касается опоры. Это обстоятельство дает возможность не учитывать вес каната при определении тягового усилия.
По
мере приближения груза к мачте угол ![]() (см.
рис. 6.4,6) возрастает. Когда груз достигнет
точкиМ на
расстоянии x<Ln от
мачты, появляется вертикальная
составляющая тягового усилия,
отрывающая передний конец груза от
опоры. Пренебрегая провисанием каната,
величину угла
(см.
рис. 6.4,6) возрастает. Когда груз достигнет
точкиМ на
расстоянии x<Ln от
мачты, появляется вертикальная
составляющая тягового усилия,
отрывающая передний конец груза от
опоры. Пренебрегая провисанием каната,
величину угла ![]() можно
определить по формуле
можно
определить по формуле
tg ![]() =H/х+
tg
=H/х+
tg![]() (6.43)
(6.43)
Расстояние х, на
котором произойдет подъем переднегоконца
пачки над опорой, принимая tg ( ![]() -
-![]() )=tg
)=tg![]() -
tg
-
tg![]() :
:
![]() ,
,
где
/ — длина пачки груза; /о — расстояние
от заднего конца пачки до центра ее
тяжести; ![]() —
коэффициент сопротивления движению
груза;
—
коэффициент сопротивления движению
груза;![]() —
угол наклона пути.
—
угол наклона пути.
Тяговое усилие в грузовом канате определяется в зависимости от расстояния от мачты до пачки.

Рис. 6.4. Одномачтовая канатная установка:
а — схема установки; б — расчетная схема,; / — монтажный блок; 2 — возвратный блок; 3 — грузовой блок; 4, 5 — концевые блоки; 6 — лебедка; 7 — мачта
Двухмачтовые канатные установки.Эти установки в зависимости от способа перемещения груза подразделяются на подвесные и полуподвесные. Они находят применение на погрузоч-но-разгрузочных работах, штабелевке и трелевке лесоматериалов. В погрузочных подвесных установках груз перемещается только в вертикальной плоскости, проходящей через обе мачты.
. Различают канатные .несущим канатом (рис. 6.5, а), с ком-Кнесущим канатом (рис. 6.5, б). В первых двух типах установок i последнем — груз подвешивается неканатам.
Установка-с подъемно-несущим канатом не имеет специального несущего каната, его роль выполняет подъемный, по которому и перемещается грузовая тележка посредством тяговых канатов Т и В. Подъем и опускание тележки вместе с грузом происходит при натяжении и ослаблении подъемного каната и изменении стрелы провеса. Такая установка может не иметь грузовой тележки; в этом случае груз поднимается и перемещается непосредственно подъемно-несущими канатами (см. рис. 6.1,е).
В установке без несущего каната (рис. 6.5, в) подъем и опускание груза происходят при изменении натяжения одного из тяговых канатов и одновременном изменении стрелы провеса. Для горизонтального перемещения необходимо производить наматывание одного из канатов при одновременном разматывании другого.

Рис. мачтовых канатных установок: Сканированным подъемно-несущим канатом; в — без
ровная мачта; 3 — хвостовая мачта; 4 — оттяжка;
J'; несущий; Я — подъемный; Т — тяговый; В — воз-I .подъемно-тяговый; ПН —подъемно-несущий
Блоки и канаты двухмачтовых установок монтируют на высоких; мачтах деревянной или металлической конструкции. В стационарных установках устойчивость мачт обеспечивается оттяжками, а в передвижных для этой цели необходимо иметь тяжелые противовесы. Вследствие этого передвижные установки громоздки и имеют большую массу. На лесных складах лесозаготовительных предприятий применяют стационарные установки, как наиболее простые. В передвижных кабель-кранах, применяемых на крупных лесоперевалочных складах башни (мачты) устанавливаются на рельсовые пути. Для сохранения натяжения несущих канатов одна из башен, имеющая противовесы, делается качающейся, опирающейся на один рельс. Иногда для этой цели применяют грузовое натяжное устройство. Несущий канат служит опорой для тележки. Для него применяют спиральные канаты одинарной свивки без мягкого сердечника. Он прикрепляется к вершинам мачт или, как показано на рис. 6.5,а (мачта Б), проходит через подвесной башмак и прикрепляется на земле к мертвякам. При таком устройстве несущий канат легче натягивать и изменять его провес. Башмак представляет собой шину с желобом на ободе. Такую шину можно сделать неподвижной, укрепив ее на вершине мачты (рис. 6.6,6).
Тележка (рис. 6.6,а), несущая груз, имеет одно или несколько колес. Число ходовых колес определяется по нагрузке на тележку. Давление на одно колесо допускают до 5. ..10 кН. Диаметр колес по кругу качения 200.. .250 мм.
Число барабанов лебедки и их назначение должны соответствовать типу установки. В общем случае число барабанов равно числу приводимых в движение канатов. Скорость движения принимают: тяговых до 5 м/с и подъемного до 0,7 м/с. Погрузочные установки на лесных складах устраивают с пролетом до 70. ..100 м, а трелевочные до 250.. .300 м. Кабель-краны могут иметь пролет до 500 м. Установки, применяемые для погрузки и разгрузки длинных лесоматериалов (хлыстов, деревьев), обычно имеют четыре мачты и две грузовые тележки, что обеспечивает устойчивое положение груза при его перемещении.
Пролет или расстояние между мачтами выбирают в зависимости от назначения канатной установки. У погрузочных и штабелевочных установок он зависит от длины штабеля и ширины подвижного состава. В установках, применяемых на разгрузке и подаче лесоматериалов на приемные площадки раскряжевочных линий, необходимо учитывать также длину этих площадок. В общем случае для двухмачтовой канатной . установки (рис. 6.7, а) пролет
![]() (6.45)
(6.45)
где
/Шт
— длина штабеля; b —
ширина подвижного состава; /пл —длина
приемно-перегрузочной площадки
раскряжевочной линии; ![]() —
общая величина разрывов между мачтами
установки, штабелем, подвижным составом
и другим технологическим оборудованием,
находящимся в пролете канатной
установки.
—
общая величина разрывов между мачтами
установки, штабелем, подвижным составом
и другим технологическим оборудованием,
находящимся в пролете канатной
установки.
Двухмачтовые установки могут иметь разную высоту мачт, поэтому
![]() (6.46)
(6.46)
где f — стрела провеса несущего каната под нагрузкой по середине пролета; hT — высота занимаемая тележкой и полиспастом; /Ст— длина стропов или высота, занимаемая захватными устройствами вместе с поднятой пачкой; h — высота подъема груза.
В
подвесных установках вес груза и тележки
воспринимается всеми канатами,
сохраняющими тележку в определенном
положении. Натяжение каждого из канатов
зависит от способа его воздействия на
тележку и груз. Для определения натяжения
канатов двухмачтовой установки (см.
рис. 6.5, а) рассмотрим расчетную схему,
изображенную на рис. 6.7,6. В ней на вершину
мачты Адействуют
силы: Sa —
натяжение несущего каната, Ро — натяжение
подъемного каната и Тр —
натяжение тягового рабочего каната.
Соответственно на вершину В действуют
сила Sb,
Ро и
Тв. Груз висит между двумя
мачтами Л и В, имеющими
разность по высоте Н. Вес
груза вместе с тележкой Q
= Qr+GT и
вес 1 м всех канатов ql. Если
пренебречь провисанием и углом наклона ![]() ,
то их вес будет равенql. Таким
,
то их вес будет равенql. Таким
образом, в точке С действует нагрузка Q+ql/2. Обозначив равнодействующую, направленную к мачте A Ra и мачте В Rb, величину их определяют по (3.21) и (3.22):
![]() (6.47)
(6.47)
![]() (6.48)
(6.48)
|
|

Так как мачта А выше мачты В, то Ra>Rb. Наибольшее значение Ra будет при положении тележки в середине пролета, когда
![]() ,
, ![]() (6.49)
(6.49)

Рис. 6.7. Расчетные схемы подвесной установки:
/_Мачта; 2 — грузовая тележка; 3 — несущий канат,; 4 — грузоподъемный канат; 5,
6 — тяговые канаты; 7 — оттяжки; 8—лебедка; 9 — пачка лесоматериалов
При
этих значениях углов ![]() и
и![]() (6.47)
и (6.48) примут вид:
(6.47)
и (6.48) примут вид:
![]() (6.50)
и
(6.50)
и
![]() (6.51)
(6.51)
где f - высота провеса в середине пролета.
Натяжение подъемного каната в общем случае равно
![]() ,
,
где
где Qr — вес груза,
подвешенного к тележке; т —
кратность полиспаста; ![]() —его
КПД.
—его
КПД.
Натяжение возвратного каната Тв при рабочем ходе тележки должно быть больше сопротивления разматыванию его с барабана или равно натяжению при провисании этого каната на величину f. Натяжение тягового каната рабочего хода определяется следующим образом. Натяжения несущего каната по обе стороны тележки равны между собой, поэтому можно принять Sa=Sb. Вес несущего каната не оказывает влияния на натяжение тяговых канатов, что дает возможность при определении этого натяжения пренебречь весом канатов и принять ql/2 = 0.
Наибольшее
значение ![]() будет
при подходе к мачте А, когда
будет
при подходе к мачте А, когда![]() и
и![]() .
.
В установке без несущего каната (см. рис. 6.5, в) груз висит надвух тяговых канатах. В этом случае в Sа=0, SЬ=0, Ро=0, поэтому
Ra = Tр и RB = TB. (6.60)
Натяжение
в тяговых канатах определяют по (6.50),
когда груз находитсяпосредине
пролета при наименьшей стреле провеса
В двухмачтовых установках можно
принимать, что силы, приложенные к
вершинам мачт, действуют в одной
плоскости. В них для мачтыЛ (см.
рис. 6.7,6) следует принимать P
= Ra и Т
= ТР +
ТВ +
Р0 при
положении тележки посредине пролета;
углы ![]() =
=![]() а,
а, ![]() =
=![]() как
показано на рис. 6.5, а. Для мачтыВ,
P = Rb; если
несущий канат закреплен на земле, то T
= Sb, а
если на мачте, Т
= 0.
как
показано на рис. 6.5, а. Для мачтыВ,
P = Rb; если
несущий канат закреплен на земле, то T
= Sb, а
если на мачте, Т
= 0.
7.Устройство установок для раскряжевки хлыстов периодического действия с продольной подачей.
Для раскряжевки хлыстов применяют однопильные установки периодического действия с продольным перемещением хлыста ПЛХ-ЗАС, ПХЛ-3, ЛО-15С.

Рис. 74. Раскряжевочные установки с продольным перемещением хлыста: а — ПЛХ-ЗАС; б —ЛО-15С; / — приемная площадка; 2 — двухцепной подающий транспортер; 3 —разделительное устройство; 4 — пила АЦ-ЗС; 5 —зажимное устройство- 6 — транспортер для уборки опилок и кусковых отходов; 7 - роликовый приемный транспортер; 8 - сортировочные транспортеры; 9 — лесовозная дорога; 10 — бункер для отходов-//-манипулятор ЛО-13С; 12 -питающий валец; 13- приемный лоток с упорами
Раскряжевочная установка ПЛХ-ЗАС (рис. 74,а) включает разделитель хлыстов РХ-2, механизм подачи леса под пилу, состоящий из подающего двухскоростного транспортера ТС-29С и приемного роликового транспортера СП-ЗС с выдвижными упорами (см. рис. 73, б) и двусторонним сбрасывающим устройством, а также круглопильный станок АЦ-ЗС. Для зажима хлыста в процессе пиления имеются два боковых зажимных рычага с гидроприводом. Процесс работы этой установки протекает следующим образом. Хлысты с приемной площадки разделителем РХ-2 перемещаются поштучно на транспортер, периодически подающий хлысты под пилу для распиловки на отрезки необходимых размеров, которые затем с помощью сбрасывающего устройства подаются на один или на два сортировочных транспортера, расположенных по обе стороны приемного транспортера. На установке ПЛХ-ЗАС можно раскряжевывать хлысты с наибольшим диаметром 0,6 м. Скорость подачи хлыста (м/с): основная 1,09, замедленная 0,34. На установке можно получить 14 различных размеров по длине отрезков с точностью + 2—3 см. Общая установленная мощность электродвигателей 64,7 кВт.
Раскряжевочная установка ЛО-15С (рис. 74,6) представляет собой измененный вариант линии ПЛХ-ЗАС. Для поштучной загрузки служит гидроманипулятор ЛО-13С. Роликовый приемный транспортер заменен поворотным гладким лотком с выдвижными упорами, имеющими общий привод с гидродемпфером, позволяющим плавно воспринимать и гасить удары движущегося хлыста, применять односкоростной подающий транспортер с питающим вальцом и повышать точность размеров выпиливаемых сортиментов. Пильный механизм установки включает станок АЦ-ЗС и трехпильный блок, расположенный вдоль приемного лотка и предназначенный для распиловки вершинной части хлыста. Комлевая часть хлыста распиливается по индивидуальной схеме раскроя пилой АЦ-ЗС. Полученные лесоматериалы по лотку поступают на сортировочный транспортер. Вершинная часть хлыста длиной до 8 м скатывается при наклоне лотка на пильный блок и распиливается по обезличенной схеме раскроя на двухметровые отрезки, поступающие на отдельный сортировочный транспортер. Скорость подачи хлыста под пилу 1,86 м/с. Диаметр пил пильного блока 800 мм, скорость резания 68,6 м/с. Число размеров по длине получаемых лесоматериалов 19. Общая установленная мощность, включая манипулятор, 124 кВт.
Раскряжевочная установка ПЛХ-3 в отличие от ПЛХ-ЗАС имеет балансирную пилу АЦ-2М. Прижим хлыста в процессе пиления осуществляется двумя рычагами сверху. Подающий и приемный транспортеры имеют скорость 1,1 и 0,55 м/с. Число упоров приемного транспортера—12. Установленная мощность 43 кВт.
8.Классификация и назначение подъемно-транспортных машин. Механические захватные устройства для лесных грузов.
Подъемно-транспортные машины применяются для перемещения лесных грузов на лесосеках, лесных складах и внутри лесоперерабатывающих цехов.
Подъемно-транспортные машины можно подразделить по направлению движения груза, принципу действия, положению двигателя по отношению к перемещаемому грузу, а также по соединению разнотипных механизмов в агрегатные и комбинированные многооперационные машины.
По направлению движения груза машины подразделяются на подъемные и транспортные. Подъемные машины служат в основном для вертикального перемещения груза, а транспортные— для горизонтального.
По принципу действия машины, перемещающие груз непрерывно, без остановки их на загрузку и разгрузку, при непрерывном движении тягового органа в одном направлении, носят название машин непрерывного действия. К ним относятся лесотранспортеры всех видов. Если машина останавливается на период загрузки и разгрузки и ее ход с грузом чередуется с ходом без груза, она называется машиной периодического действия. Работа таких машин состоит из ряда циклов, включающих следующие операции: прицепку или захват груза, рабочий ход, отцепку или разгрузку и обратный ход. Машины периодического действия составляют большую группу, в которую входят канатные установки, краны, манипуляторы, машины лесосечного и лесоскладского транспорта.
В подъемно-транспортных машинах двигатель может перемещаться вместе с грузом или оставаться неподвижным. Так, при транспортировке груза тракторами, автопогрузчиками, автолесовозами двигатель этих машин перемещается вместе с грузом. У лесотранспортеров, канатных установок и отчасти у кранов двигатель приводного механизма не изменяет своего положения, а груз перемещается посредством тягового органа.
Многие из подъемно-транспортных машин соединяют в себе два или более разнотипных механизма — для горизонтального перемещения, и для подъема груза. Некоторые из таких агрегатных машин приспособлены в основном для транспортирования груза, т. е. перемещения на большие расстояния, и подъемный механизм в них по устройству отличный от транспортного, служит для загрузки и разгрузки транспортного устройства. Такие машины могут быть названы транспортно-подъемными. К ним можно отнести автопогрузчики, автолесовозы, трелевочные тракторы и т. д.
Другие машины предназначены в основном для подъема груза. В них механизм транспортирования является вспомогательным. Они относятся к подъемно-транспортным агрегатным машинам. Это стреловые и отчасти мостовые краны, челюстные тракторные погрузчики и т. д. Кабельные и мостовые краны больших пролетов в равной степени могут быть названы как подъемно-транспортными, так и транспортно-подъемными агрегатными машинами.
В некоторых случаях на транспортную или подъемно-транспортную машину помещают механизмы и устройства для обработки дерева. Такие машины следует отнести к многооперационным (например, валочно-трелевочные, валочно-пакетирующие, валочно-раскряжевочные, сучкорезно-раскряжевочные).
Захватные устройства применяются в подъемно-транспортных машинах и механизмах периодического действия. К ним относятся канатные и полужесткие захватные устройства, грейферы, челюстные и клещевые захваты. В зависимости от типа и конструкции захватные устройства используются в канатных установках, кранах, манипуляторах, погрузчиках-штабелерах, машинах лесосечного и складского транспорта.
Грейферы применяются для механизированного захвата лесных грузов при выполнении погрузочно-разгрузочных и штабе-левочных работ. Они имеют рабочие органы (челюсти), закрепленные шарнирно на раме, и приводной механизм. Принцип действия грейфера состоит в том, что при опускании его челюсти в раскрытом положении внедряются в груз, а затем под действием привода смыкаются, захватывая и поднимая часть груза, находящуюся между челюстями.
Грейферы можно классифицировать в зависимости от вида захватываемого груза, способа его захвата, числа челюстей и типа приводного механизма. От вида груза, его формы и размеров и способа захвата грейферы подразделяются на радиальные (рис. 4.3, а, б, в, г), ковшовые (рис. 4.3, е), торцовые (рис. 4.3, ж), а по числу челюстей — двух- и многочелюстные (рис. 4,3, д). Радиальные грейферы применяются для захвата круглых лесоматериалов (бревен, хлыстов). В отличие от радиального торцовый грейфер в процессе захвата бревен и кряжей выравнивает их по торцам.
При погрузке сыпучих лесоматериалов (щепа, опилки, мелкие кусковые отходы) используют ковшовые и многочелюстные грейферы.
По типу привода грейферы делятся на канатные (см. рис. 4.3, а, е) и приводные: моторные (рис. 4.3, б, в), гидравлические (рис. 4.3,г) и пневматические. По числу канатов канатные грейферы могут быть одно-, двух- и четырехканатные. В этих грейферах челюсти смыкаются с помощью каната- от лебедки, установленной на кране, а в приводных — с помощью привода, находящегося на самом грейфере. Для погрузки и штабелевки круглых лесоматериалов вразнокомелицу грейферы оснащаются разворотными механизмами.
Существующая методика расчета грейферных механизмов исходит из условия наибольшего нагружения рабочих органов приводным механизмом. При этом не учитывают вид груза, условия заполнения грейфера и ряд других факторов, влияющих на величину усилия на рабочих органах. Захват лесных грузов и заполнение ими грейферов является весьма сложным и недостаточно изученным процессом. Это значительно затрудняетаналитическое определение действительного усилия на челюсти грейфера в зависимости от различных факторов.
Челюстные захваты.Эти захваты применяются в тракторных и автомобильных погрузчиках в качестве рабочих грузозахватных органов. Они имеют две челюсти, связанные с рукоятью или подвижной рамой погрузчика.

Рис. 4.8. Типы челюстных захватов:
а — с верхней подвижной челюстью,; б — с нижней подвижной челюстью; в — с обеими подвижными челюстями; г— расчетная схема
Клещевые захваты.Они применяются в качестве грузозахватных органов в кранах-манипуляторах при поштучном перемещении лесоматериалов (поваленных деревьев, хлыстов, бревен и т. д.) и на колесных и гусеничных трелевочных тракторах при перемещении пакета хлыстов или деревьев в полуподвешенном положении. Клещевой захват состоит из двух клещевых рычагов и механизма, приводящего их в движение. Различают одно- и двусторонние клещевые захваты. В первых (рис. 4.9, а, б) один из рычагов устанавливается неподвижно, а второй имеет вращательное движение. Такие клещевые захваты более применимы при боковом захвате груза.

Рис. 4.9. Типы клещевых захватов: а, б — односторонние; в, г, д — двусторонние
9. Скребковые лесотранспортеры для сыпучих грузов.
В скребковых лесотранспортерах (рис. 13.1,а) груз перемещается рабочими органами по неподвижной опоре. Неподвижной опорой служит дно лотка, а рабочими органами — скребки, закрепленные на тяговом органе. В качестве тягового органа используют цепи и канаты. Основными достоинствами скребковых лесотранспортеров по сравнению с несущими является простота их конструкции и возможность автоматической разгрузки по всей длине. Для этого необходимо иметь отверстие в лотке, в которое проваливается груз, освобождая лоток. К недостаткам скребковых лесотранспортеров относится большое трение и износ трущихся частей. Вследствие этого удельный расход энергии при перемещении лесных грузов в 2 раза больше, чем у несущих лесотранспортеров со скользящими опорами, и в 4 раза больше, чем у лесотранспортеров с ходовыми роликами. Конструкция скребковых лесотранспортеров приспосабливается к форме и размерам перемещаемого груза.
Скребковые лесотранспортеры для сыпучих грузов.Для транспортировки сыпучих грузов (опилок, щепы, коры, стружки) применяют одно- и двухцепные скребковые лесотранспортеры, перемещающие груз нижней ветвью тягового органа. Лесотранспортеры со скребками длиной до 400 мм имеют одну цепь, при длине скребков более 400 мм ставят две цепи. В одноцепных скребковых лесотранспортерах применяется комбинированная цепь (см. рис. 9.2, г, д). Она имеет достаточную боковую жесткость, что предохраняет скребок от перекосов во время движения. Кроме того, такая цепь весьма удобна для прикрепления к ней рабочих органов—скребков (рис. 13.1,6).
В
двухцепных лесотранспортерах применяют,
сварные цепи, которые прикрепляют к
обоим концам скребка. В качестве тягового
органа в скребковых лесотранспортерах
применяют и канаты, однако использование
их ограничено, так как канат, раскручиваясь,
вращает скребок и, если скребок
прямоугольной -формы, то один из его
концов поднимается над дном лотка. В
связи с этим в канатных скребковых
лесотранспортерах целесообразнее
применять скребки круглой формы. В
цепных скребковых лесотранспортерах
скребки делают деревянными или
металлическими. Длину и высоту скребка
l и h выбирают
в зависимости от производительности
транспортера, а толщину Ь —
по конструктивным соображениям. Размеры
скребков: длина 200, 300 и 400 мм; высота
60, 80 и 100 мм. Расстояние между скребками
l=0,4. ..1 м. Оно должно быть кратным двойному
шагу цепи, т. е. i={ ![]() +
+![]() )n,где п —
целое число, обычно 3, 4, 5.
)n,где п —
целое число, обычно 3, 4, 5.
Опорой
для груза служит лоток (см. рис. 13.1, а,
сечение А—А). Для
опилок стенки лотка делают вертикальными,
а для щепы — наклонными. Высоту
вертикальных стенок лотка принимают
на 10 см больше высоты скребка, т. е. ![]() =
h+10 см. Ширину дна лотка следует брать
такой, чтобы предотвратить заклинивание
скребка в лотке при его повороте. Для
этого необходимо, чтобы ширина лотка
lл была
больше диагонали основания скребка,
т. е. lл>
=
h+10 см. Ширину дна лотка следует брать
такой, чтобы предотвратить заклинивание
скребка в лотке при его повороте. Для
этого необходимо, чтобы ширина лотка
lл была
больше диагонали основания скребка,
т. е. lл> ![]() ,
где / — длина иЬ —
толщина скребка (Ь = 60. ..80 мм). Обычно
принимают 1Л =
1 + +
50 мм.
,
где / — длина иЬ —
толщина скребка (Ь = 60. ..80 мм). Обычно
принимают 1Л =
1 + +
50 мм.
Ведущие звездочки для комбинированных цепей изготовляют обычно с 5.. .8 зубьями. Скорость цепи скребковых лесотранспортеров небольшая; v=0,3..0,8 м/с. Натяжные устройства — винтовые. Эстакада скребкового лесотранспортера деревянная или металлическая, она может иметь наклонные и горизонтальные участки, поэтому профиль ее горизонтальный или с вогнутой шиной, выполненной по параболе. Радиус параболы определяется из условия, что скребки не должны подниматься над дном лотка.
Для перемещения сыпучих грузов находят применение скребковые лесотранспортеры ТОЦ12, ТОЦ16 и ТОЦ16-5. Они устроены идентично, но имеют некоторые конструктивные отличия.

Рис. 13.1. Скребковый цепной лесотранспортер: /—цепь; 2—скребок; 3 — ведущая звездочка; 4 — лоток; 5 — натяжное устройство
При расчете скребковых лесотранспортеров необходимо учитывать, что сыпучий груз перемещается порциями по дну лотка (рис. 13.2,а). В связи с этим при определении сопротивления движению груза и скребка необходимо учитывать различие коэффициентов сопротивления движению груза и скребка. Объем порции сыпучего груза V, м3, захватываемого одним скребком, зависит от высоты и длины скребка, а также от угла наклона лотка. Если угол откоса сыпучего груза р, то по рис. 13.2,0
![]() (13-1)
(13-1)
По
опытным данным, ![]() =
0,2 м и
=
0,2 м и![]() 20°,
следовательно, ctg
20°,
следовательно, ctg![]() =
3 и
=
3 и
V = lh (0,2 + 0,15h), (13.2)
где / и h в метрах.
Приближенно
V = 0,3lh (13-3)
Тяговое
усилие в точке 4 (см.
рис. 1.32, а) определяется по с учетом
коэффициентов сопротивления движению
груза ![]() и
тягового органа
и
тягового органа![]() T:
T:
T4 = ![]() (13.4)
(13.4)
Здесь
qт — вес 1 м тягового органа со
скребками; ![]() — вес
груза, приходящийся на 1 м длины тягового
органа, в которой V находится
из предположения, что весь лоток
лесотранспортера заполнен сыпучим
грузом на высоту скребка, т. е. V=hli, тогда
— вес
груза, приходящийся на 1 м длины тягового
органа, в которой V находится
из предположения, что весь лоток
лесотранспортера заполнен сыпучим
грузом на высоту скребка, т. е. V=hli, тогда
![]() =
= ![]() (13-5)
(13-5)

Рис. 13.2. Расчетные схемы скребковых лесотранспортеров
Первоначальное
натяжение тягового органа S0 определяется
из условия сдвига тягового органа
холостой ветви и допустимого отклонения
скребка. По первому условию So определяется
по (10.17), в которой принимают w
= ![]() T. По
допустимому отклонению скребка от
нормального положения в результате
эксцентричного приложения к нему
нагрузки (рис. 13.2, в) первоначальное
натяжение находится из условия равновесия
относительно точки М (пренебрегая
толщиной скребка Ь):
T. По
допустимому отклонению скребка от
нормального положения в результате
эксцентричного приложения к нему
нагрузки (рис. 13.2, в) первоначальное
натяжение находится из условия равновесия
относительно точки М (пренебрегая
толщиной скребка Ь):
S0 = ![]() (13.6)
(13.6)
где ![]() —
допустимый угол отклонения
скребка,
—
допустимый угол отклонения
скребка,![]() =7...10°;Р
— усилие,
приложенное к скребку, равное по
величине сопротивлению движения скребка
и груза, находящегося между соседними
скребками:
=7...10°;Р
— усилие,
приложенное к скребку, равное по
величине сопротивлению движения скребка
и груза, находящегося между соседними
скребками:
Р = ![]() (13.7)
(13.7)
![]() —угол
наклона лесотранспортера.
—угол
наклона лесотранспортера.
10. Определение сопротивления движению на прямолинейных участках лесотранспортера.
Для передвижения тягового органа к нему от ведущего колеса прикладывается тяговое усилие, необходимое для преодоления сопротивлений, которые препятствуют этому движению. При установившемся движении в транспортерах имеет место два вида сопротивлений движению: сопротивление от трения о неподвижную опору и сопротивление от подъема. Первое из них зависит от типа рабочих органов и коэффициента трения. Второе находится в зависимости от изменения высоты подъема груза и тягового органа.
На рис. 9.7, а представлена расчетная схема транспортера, у которого обе ветви тягового органа, верхняя и нижняя, поддерживаются неподвижными опорами, ведущее тяговое колесо Л находится наверху, груз лежит на верхней ветви и движется вверх к ведущему колесу. Путь, проходимый тяговым органом, состоит из четырех участков, из них два прямолинейных, 1—2 и3—4, и два криволинейных, 2—3 и 4—1. Усилие, которое необходимо приложить к тяговому органу для приведения его в движение, должно преодолеть сопротивления на прямолинейных и криволинейных участках путитягового органа.
Сопротивление
движению на участке /—2 (холостая ветвь).
Сопротивление на прямолинейном участке
равно усилию, которое необходимо
приложить к тяговому органу в конце
этого участка, чтобы привести в движение
тяговый орган. Участок /—2 представляет
собой холостую ветвь, без груза.
Сопротивление движению на участке 1—2
Р ![]() равно
усилию, необходи мому для передвижения
тягового органа вниз по наклонной опоре.
Оно определяется по
равно
усилию, необходи мому для передвижения
тягового органа вниз по наклонной опоре.
Оно определяется по
![]() ,
(9.34)
,
(9.34)
где w —
коэффициент сопротивления движению; а
— угол наклона транспортера; Qi — вес
тягового органа и рабочих органов на
участке 1—2. Q,= ![]() (q
(q ![]() —
вес 1 м тягового органа вместе с рабочими
органами, L
—
вес 1 м тягового органа вместе с рабочими
органами, L ![]() —
расстояние между колесами транспортера).
—
расстояние между колесами транспортера).
Так как L0cosa = L и L0sina = Н, то
![]() (9.35)
(9.35)
При wL>H величина Р\-2 будет положительной и для передвижения тягового органа вниз по опоре следует приложить к нему в точке 2 тяговое усилие Т2 = Р\-2. Если wL<H, то сопротивление Р\-2 будет отрицательным, к тяговому органу не требуется прикладывать никакой силы в точке 2, и он сам под влиянием силы тяжести будет опускаться по наклонной опоре и создавать натяжение в точке 1, равное Т\ = —Р\-2. Если участок /—2 горизонтален, то а = 0, Н = 0 и
![]() .
(9.36)
.
(9.36)
Сопротивление движению на участке 3—4 (рабочая ветвь).
Этот
участок представляет собой рабочую или
грузовую ветвь тягового органа, поэтому
общий вес тягового органа и груза на
участке 3—4
Q2= (q ![]() +qr)L0. Сопротивление
движению Р3-4
по (6.5) при
+qr)L0. Сопротивление
движению Р3-4
по (6.5) при ![]() =
w и
движении вверх составит
=
w и
движении вверх составит
![]() (9.37)
(9.37)
или ![]() (9.38)
(9.38)
Если участок горизонтален, то Н=0
![]() (9.39)
(9.39)
Формулы (9.35) и (9.39) дают возможность определять сопротивление движению на прямолинейных участках для различных схем транспортеров.
![]()
где q — вес 1 м тягового органа (цепи, каната, ленты); qP — вес одного рабочего органа; i — расстояние между ними.
В
формулах (9.35) и (9.39) коэффициент.
сопротивления движению w принимается
в зависимости от типа рабочих органов.
При скользящих рабочих органах он равен
коэффициенту трения скольжения w
= ![]() .
.
11. Устройство и расчет роликовых лесотранспортеров. Область применения
Роликовые лесотранспортеры относятся к транспортным устройствам без гибкого тягового органа. Принцип действия их заключается в том, что груз перемещается по поверхности вращающихся роликов, благодаря чему значительно уменьшается сопротивление движению.
По устройству они подразделяются на неприводные (рис. 14.1,а) и приводные (рис. 14.1,6, в).Неприводные роликовые лесотранспортеры могут быть горизонтальные и наклонные. В горизонтальных груз перемещается под действием внешней силы, а в наклонных силой тяжести груза. Движение груза передается роликам, заставляя их вращаться. Приводные роликовые лесотранспортеры имеют приводной механизм, передающий движение от двигателя к роликам. Вращающиеся ролики перемещают лежащий на них груз. Роликовые лесотранспортеры состоят из роликов, их опор, рамы и привода.
Конструкция роликов приспосабливается к форме передвигаемого груза. Они могут быть цилиндрическими (рис. 14.1, г), коническими (рис. 14.1, д), двухконусными (рис. 14.1, е), седловидными (рис. 14.1, ж). Поверхность роликов может быть гладкой, ребристой, с шипами, а также с ребрами (гребнями), расположенными по винтовой линии.
Гладкие цилиндрические ролики используются при перемещении пиломатериалов (шпал, досок, брусьев). Диаметр таких роликов от 100 до 160 мм. Цилиндрические неприводные ролики изготовляются пустотелыми из металлических труб на шариковых опорах с неподвижными осями (рис. 14.1, г). Приводные цилиндрические ролики вращаются или на осях вместе с прикрепленными к ним цепными звездочками или же вместе с валом. При поштучном перемещении груза длина ролика /р принимается больше ширины груза, т. е. /р>6, где Ь — ширина доски или шпалы. Если на ролике должно находиться п штук груза, то lp>nb.Для поштучного передвижения шпал и досок /Р = 300...400 мм при перемещении одновременно нескольких штук /р = 800. ..1000 мм.
Цилиндрические ролики применяют и для транспортирования круглых лесоматериалов. В этом случае по обеим сторонам роликового лесотранспортера ставят направляющие стенки или на роликах делают боковые реборды для предохранения от раскатывания лесоматериалов в стороны. Вес цилиндрического ролика определяется по формуле
![]() (14.1)
(14.1)
где /р — длина ролика, м; g — ускорение свободного падения.
Одноконусные
ролики применяются для поперечного
смещения и сбрасывания груза, они
устанавливаются обычно в конце роликового
лесотранспортера. Конические и седловидные
ролики также используются при
транспортировании круглых лесоматериалов.
Их изготовляют литыми чугунными с
ребристой поверхностью (см. рис.
14.1, е) или
стальными сварной конструкции с
приваренными ребрами (см. рис.
14.1, ж). Чугунные
ролики состоят из двух усеченных конусов.
Угол конусности а = 40...60°, наименьший
диаметр ![]() =80...
100 мм; длина усеченного конуса h =
20...25 см. Расстояние между усеченными
конусами а = 60...80 мм. При постоянном числе
оборотов роликов скорость движения
круглых лесоматериалов по коническим
роликам зависит от диаметра окружности
касания бревна о ролик, определяемого
по формуле
=80...
100 мм; длина усеченного конуса h =
20...25 см. Расстояние между усеченными
конусами а = 60...80 мм. При постоянном числе
оборотов роликов скорость движения
круглых лесоматериалов по коническим
роликам зависит от диаметра окружности
касания бревна о ролик, определяемого
по формуле
D0 =
D ![]() + (d sin
a/2—a) tg
a/2 , (14.2)
+ (d sin
a/2—a) tg
a/2 , (14.2)
где d-—диаметр перемещаемого бревна.
При а = 0
D0 =
D ![]() + d sin
a/2tg a/2 , (14.3)
+ d sin
a/2tg a/2 , (14.3)
Длина ролика, состоящего из двух усеченных конусов,
![]() (14.4)
(14.4)
Вес ролика (двух усеченных конусов) совместно с валом
![]() (14.5)
(14.5)
где А — коэффициент зависящий от конструкции ролика (для литых чугунных роликов Л = 1600, для сварных стальных Л = 800); DuD0, h — размеры ролика, м.
Наибольший диаметр ролика равен
![]() (14.6)
(14.6)
а длина усеченного конуса составляет
![]() (14.7)
(14.7)
где
d ![]() —
наибольший диаметр бревна.
—
наибольший диаметр бревна.
Скорость движения груза на приводном лесотранспортер с коническими роликами
![]() (14.8)
(14.8)
где п —частота вращения ролика, мин-1; со — угловая скорость его с-1.
Если перемещают лесоматериалы большой длины, у которых разница диаметров комля и вершины большая, то для определения D0 по (14.2) и (14.3) принимается значение d, соответствующее диаметру посередине его длины.
У
седловидных роликов (см. рис. 14.1, ж) радиус
седловины R должен
быть больше радиуса поперечного сечения
самого крупного бревна; в этом случае
диаметр круга качения будет постоянным
и равным наименьшему диаметру
ролика D ![]() .Чтобы
груз всегда лежал на двух роликах,
расстояние между ними iр берется
в зависимости от длины самого короткого
отрезка груза: ip<
.Чтобы
груз всегда лежал на двух роликах,
расстояние между ними iр берется
в зависимости от длины самого короткого
отрезка груза: ip< ![]() .
.
Неприводные роликовые лесотранспортеры (рис. 14.2, а) применяют для передвижения лесоматериалов на небольшие расстояния с частыми остановками при подаче их к станкам для обработки, а также при транспортировке от.них. Ролики таких лесотранспортеров устанавливаются на деревянной или металлической раме или на отдельных стойках.
Усилие Т, которое необходимо приложить к грузу для передвижения его по роликам, зависит от сопротивления трения в подшипниках ролика и от трения качения груза по поверхности роликов, т. е.
![]() (14.9)
(14.9)
где Q —
вес груза, лежащего на роликах; wp —
вес ролика; пр' —
число роликов под грузом; ![]() —
коэффициент сопротивления движению от
трения на цапфах роликов;
—
коэффициент сопротивления движению от
трения на цапфах роликов;![]() —
коэффициент трения качения груза по
роликам.
—
коэффициент трения качения груза по
роликам.
Вприводных роликовых лесотранспортерах движение роликам, а от них грузу, лежащему на роликах, передается от приводного механизма. Поэтому чем больше коэффициент трения груза о поверхность ролика, тем больше сила трения, приводящая в движение груз, и тем быстрее сообщается движение грузу.
Для увеличения коэффициента трения поверхность роликов делают ребристой, с шипами, или покрывают ее резиной. При передвижении круглых лесоматериалов часто применяют двух-конусные ролики (см. рис. 14.1, е).
Движение от двигателя к роликам передается через редуктор и приводной механизм, состоящий из конической зубчатой или цепной передачи (рис. 14.3, а, б). Коническая зубчатая передача (см. рис. 14.3, б) применяется в коротких транспортерах для передвижения тяжелых грузов, а цепная передача (см. рис. 14.3, а) —для более легкого груза — шпал, досок. При цепном приводе движение роликам передается цепями последовательно от одного вала к другому или одной цепью ко всем валам роликов. При зубчатом приводе движение валам роликов передается коническими шестернями от одного приводного вала. В приводных роликовых лесотранспортерах в движении находятся все ролики, поэтому при определении тягового усилия Т необходимо учитывать вес всех роликов. Для установившегося движения лесотранспортера
T = (Q+qpnp)wp + Qwr, (14.16)
где пр — число всех роликов лесотранспортера; Q — вес груза на лесотранс-портере.
При
пуске лесотранспортера под нагрузкой
ролики приобретают скорость быстрее,
чем груз, поэтому он скользит по роликам
и вместо трения качения имеет место
трение скольжения. Вследствие этого
в (14.16) вместо сопротивления трения
качения принимают сопротивление трения
скольжения, заменяя коэффициент wT на ![]() . Тогда
тяговое усилие Тп при
пуске лесотранспортера в ход под
нагрузкой без учета инерции роликов
составит
. Тогда
тяговое усилие Тп при
пуске лесотранспортера в ход под
нагрузкой без учета инерции роликов
составит
Tn =
(Q + npqp)wp +
Q ![]() (14.17)
(14.17)
где ц.г — коэффициент трения скольжения груза по роликам; для конических роликов вместо цг берут цк, определяемый по (14.15).

Рис. 14.1. Роликовые лесотранспортеры:
а, б, в — схемы неприводного и приводных роликовых лесотранспортеров; г — цилиндрический ролик на неподвижной оси; д — конический ролик; е — двухконусный ролик; ж — седловидный приводной ролик

Рис. 14.2. Непригодные роликовые лесотранспортеры: а — горизонтальный; б — наклонный

Рис. 14.3. Приводные роликовые лесотранспортеры: а — с цепным приводом роликов; б — с зубчатым коническим приводом роликов
12. Устройство стационарных и самоходных манипуляторов.
Манипуляторы являются разновидностью стреловых кранов, у которых на стреле закреплена рукоять (хобот) с клещевым захватом или грейфером. Они применяются для погрузки, разгрузки и штабелевки круглых лесоматериалов, а также для поштучной подачи деревьев, хлыстов и других длинномерных лесоматериалов к разделочным установкам и станкам. Кроме того, манипуляторы используются в качестве навесного технологического оборудования транспортных машин (например, в трелевочных тракторах для формирования пачки, в погрузочно-транспортных машинах для погрузки лесоматериалов). Манипуляторы бывают стационарные (рис. 7.7, а, б) и передвижные (рис. 7.7, в, г) с одной или двумя стрелами. Стационарные манипуляторы применяются в основном как загрузочные устройства лесообрабатывающих установок и станков, а передвижные—как погрузочно-разгрузочные механизмы.
Опорами передвижных манипуляторов могут служить рельсовые, гусеничные и пневматические тележки (шасси). Манипуляторы могут перемещать лесоматериалы поперек их продольной оси или вдоль нее. Рукоять манипулятора представляет собой стержень коробчатого сечения (или ферму), закрепленный шарнирно на той или иной крановой конструкции. С помощью гидроцилиндра, закрепленного на крановой конструкции, рукоять поворачивается в вертикальной плоскости. На свободном ее конце крепится клещевой захват, или грейфер, конструкция которого зависит от условий работы манипулятора.
Крановая конструкция манипулятора устанавливается на неподвижной (рис. 7.7, а) или подвижной (рис. 7.7, в, г) опоре или закрепляется на вращающейся колонне (рис. 7.7,6). В том случае, когда крановая конструкция установлена на передвижной опоре, она имеет поступательное движение в горизонтальной плоскости, а при закреплении ее на колонне — вращательное. Обычно крановая конструкция закрепляется у основания шарнирно, что позволяет манипулятору обслуживать большую площадь. В других случаях для этой же цели стрелу и рукоять делают переменной длины с телескопическим устройством.
Изменение длины производится гидравлическим цилиндром, помещенным на стреле и рукояти (хоботе).
В настоящее время для поштучной подачи хлыстов и деревьев к разделочным установкам применяются стационарные манипуляторы ЛО-13С, а для погрузочно-штабелевочных работ передвижные манипуляторы ЛТ-72А, К.Л-4. Кроме того, применяются универсальные навесные манипуляторы ЛВ-184, ЛВ-185, которые могут устанавливаться стационарно, а также нагусеничном или пневмоколесном шасси.

Рис.7.7 Типы манипуляторов:
а, б — стационарные; в, г — передвижные,; / — рукоять стрелы; 2 — стрела; 3 — клещевой захват или грейфер; 4 — гидроцилиндры; 5 — поворотная колонна; 6 — ходовая тележка; 7 — противовес; 8 — поворотная платформа
13. Механизм надвигания круглопильных станков. Определение сопротивления надвигания при вращательном надвигании.
Круглопильные станки делятся на две группы: периодического и непрерывного действия, а в зависимости от характера движения распиливаемого материала делится на три группы (рис. 64): с возвратно-поступательным движением распиливаемого материала; с возвратно-поступательным движением пилы и с непрерывным движением материала.
Пильные механизмы. Основными узлами станков являются пильный и подающий механизмы. Механизм пиления может состоять из одной из двух пил, расположенных в одной плоскости, или из одной или более пил в параллельных плоскостях.

Рис. 64. Классификация круглопильных станков для продольной распиловки
Подающий механизм станков по своей конструкции зависит от формы распиливаемого лесоматериала, последовательности распиловки, назначения самого станка.
Станки с периодической подачей применяют, когда для полной распиловки лесоматериалов требуются повторные пропилы, а станки с непрерывной подачей — при распиловке лесоматериала за один проход. В станках с периодической подачей необходимо реверсивное движение, осуществляемое при помощи тележек. В станках с непрерывной подачей такого движения не требуется, поэтому для непрерывного надвигания применяют механизмы — вальцы, транспортеры, гусеницы и др.
Круглые пилы надежны в работе, допускают большие скорости подачи, обладают высокой производительностью, могут производить продольную распиловку верхней (рис. 65, а, б) и нижней (рис. 65, в, г) частью пильного диска. При распиловке кряжей диаметром более 60 см, кроме основной пилы, устанавливают дополнительную (рис. 65, б), лежащую в плоскости основной пилы с ее перекрытием.

Рис. 65. Схемы пильных механизмов и варианты пиления на круглопильных станках для продольной распиловки: а — с встречным пилением верхней половиной пилы; б — с попутным пилением верхней половиной пилы; в — с встречным пилением нижней половиной пилы; г — с попутным пилением нижней половиной пилы; д — с двумя пильными дисками
Подающие механизмы. Тележки приводятся в движение различными приводами. На рис. 66, а реверсивное движение тележки выполняется ременной передачей. Распиливаемый кряж 9, закрепленный на тележке 10, по рельсовому пути 11 надвигается на пилу 2 при помощи каната 3, охватывающего несколькими витками барабан 4. Барабан получает вращение от пильного вала 1 (или от отдельного привода) посредством ремней 5 или 6 через редуктор 8. Оба ремня надеты на шкивы свободно. При повороте рукоятки 12 вправо леникс 7 натягивает ремень 6 и барабан начинает перемещать тележку в рабочем направлении, при повороте рукоятки 12 влево тележка движется в обратном направлении за счет натяжения ремня 5 (ремень 6 ослабевает), совершается холостой ход тележки. Регулируя натяжение ремней, можно плавно регулировать скорости движения тележки, а, следовательно, и скорость подачи. Такие подающие механизмы применяются в шпалорезных и бревнопильных станках.
Подача на тележке 1 (рис. 66, г) применяется в станках для продольной распиловки на пластины и бруски кряжей 2 диаметром до 38 см, длиной от 0,5 до 2,1 м. Диаметр пилы 3 1000 мм. Тележка приводится в движение от пильного вала через реверсивный механизм с двумя ременными передачами. Торцовый зажим кряжа, его поворот и поперечная подача выполняются вручную.
В станках с непрерывной подачей горбыли, пластины, доски и другие пиломатериалы подаются вальцами (рис. 66, б, в), а также движущейся цепью с упорами (рис. 66 д, е).

Рис. 66. Схемы круглопильных станков для продольной распиловки: а, г — с подачей на тележке, б, в — с вальцовой подачей, д, е — с цепной подачей
Зажимные механизмы служат для надежного закрепления распиливаемого лесоматериала. Зажим лесоматериала производится с боковой поверхности и с торцов. Зажим лесоматериала с боковой поверхности (рис. 67,а) производится двумя крючьями 5, которые поднимаются и при зажиме опускаются по направляющим стойкам и закрепляются замком вручную или при помощи цепи 4 от электродвигателя 1 посредством редуктора 2 и цепной передачи 3. Включенная в передачу муфта предельного момента обеспечивает надежный зажим сбежистых лесоматериалов. Применяется и гидравлическая система зажима (рис. 67,б), в которой 88 крючья 1 поднимаются, опускаются и удерживаются при помощи гидро- или пневмоцилиндров 2 При каждом повороте распиливаемого лесоматериала крюки должны подниматься и снова опускаться для зажима, что является недостатком таких конструкций.

Рис. 67. Схемы зажимных механизмов, а — боковой зажим крючьями с механическим приводом, б — то же с гидроприводом, в — торцовый зажим с гидроприводом, г — то же с механическим приводом
При зажиме лесоматериалов с торцов (рис. 67, в, г) и его повороте эти недостатки отсутствуют. Но здесь имеют место свои недостатки. Так, при зажиме с торца и при наличии гнили в месте зажима закрепление кряжа невозможно. Кряж 3 зажимается башмаками 2, один из которых имеет движение от гидроцилиндра 1 или зубчатой рейки 4, приводимой от электродвигателя через редуктор и шестерни 5.
Поворотные механизмы служат для поворота кряжа вокруг своей оси на угол 90° При зажиме кряжа крючьями его можно поворачивать вручную либо при помощи цепных, сегментных или реечных кантователей, а при зажиме с торцов специальным поворотным устройством
Цепной кантователь (рис. 68, а) поворачивает кряж 1 цепью 2 со специальными зубьями. Цепь подводится к кряжу и отводится от, него при помощи гидроцилиндра 3.
Сегментный кантователь (рис. 68,б) состоит из двух ребристых сегментов 1, сидящих на одном валу и приводятся во вращение от электропривода 2 посредством редуктора и цепной передачи. Сегменты имеют реверсивное вращение.
При торцовых зажимах поворот кряжа осуществляется с применением мальтийского креста (рис. 6, в). От электродвигателя 1 через червячную пару 2 при помощи водила 3 поворачиваются мальтийский крест 5, башмак 6 и кряж 7. При каждом повороте водила мальтийский крест поворачивается на угол 90° и воздействует на выключатель 4, который выключает в этот момент электродвигатель 1; электродвигатель включается с пульта управления оператором при нажатии кнопки.
Поворот кряжа может осуществляться и при помощи гидроцилиндра 1 (рис. 68, г), пальцем 2 на его штоке и кулачком 3 с пазами. При перемещении поршня из одного 89 крайнего положения в другой палец, скользя по пазу, поворачивает кулачок 3, башмак 4 и кряж 5 на угол 90°.

Рис. 68. Схемы поворотных механизмов: а — цепной, б — сегментный, в — с мальтийским крестом, г — с пространственным кулачком и гидроприводом

Рис. 69. Механизм центрирования рычажный
Механизмы центрирования служат для установки кряжа в торцовых зажимах. Ось кряжей любого диаметра выводится в определенное положение по отношению к оси зажимов. Рычажный механизм центрирования работает следующим образом (рис. 69).
С подающего транспортера кряж 3 сбрасывается на вилки 2 и центрируется в поперечном направлении. Гидроцилиндр 1 поднимает вилки с кряжем, а шток 90 гидроцилиндра при подъеме через коромысло 9 опускает тягу 7 вместе со скобой 5 и выключателем 4. Коромысло 9 равноплечее, поэтому вилки 2 и скоба 5 перемещаются на одинаковую величину, двигаясь друг другу навстречу. При нажатии выключателя 4 на поверхность центрируемого кряжа подача жидкости в нижнюю полость гидроцилиндра прекращается. Кряж любого диаметра будет сцентрирован относительно торцовых зажимов. Центрирующее устройство одновременно используется для замера диаметра кряжа; с этой целью на тяге 7 устанавливается щетка 6, скользящая по контактам 8, соответствующим различным диаметрам центрируемого кряжа. Нажим на выключатель 4 при соприкосновении его с поверхностью кряжа ведет не только к прекращению подъема кряжа и вилок, но и к подаче питания к щетке 6, при этом через нее и соответствующий контакт 8 передается информация о замеренном диаметре.
Механизмы поперечного перемещения кряжа или пилы (рис. 70). Для перемещения кряжа или пилы в поперечном направлении служат специальные механизмы. Закрепленный кряж 1 крючьями 2 (рис. 70,а) перемещается влево при помощи кронштейна 3 со стойкой и зубчатой рейкой 4 и червячной пары 5 от электродвигателя 6. После пропила кряж может подаваться опять влево. Вправо подача кряжа затруднительна: он может поворачиваться за счет момента сил от крючьев относительно точки опоры его на лежнях.
Кряж 1 (рис. 8, б), закрепленный торцовыми зажимами 2, может перемещаться влево и вправо, как показано на схеме рис. 70, а, так и при помощи гидроцилиндра 4, жестко связанного с кронштейном 3 (шток 5 закреплен неподвижно). Пилы могут перемещаться также при помощи гидравлического или механического привода (рис. 70, в). Пила 1 с электродвигателем 2 перемещается от электродвигателя 5 через редуктор посредством ходового винта 4 и гайки 3 в обоих направлениях. Величина поперечного перемещения определяется и задается оператором по специальной масштабной линейке или устанавливается автоматически.
На рис. 70,б показана схема автоматического перемещения и установки кряжа в заданную плоскость пропила. На кронштейне 1 на его изолированной плите закреплены две металлические контактные пластины 2 и 5, разделенные изолированным участком 4. К контактным пластинам прижаты щетки 3. Крайняя правая щетка соединена с катушкой контактора КПП, а крайняя левая — с катушкой КПЛ; внутренние щетки через кнопки К1...К5 соединены с источником питания. При включении контактора КПЛ электродвигатель вращает шестерню 6 против часовой стрелки и кронштейны 1 с торцовым зажимом 7 и кряжем 8 двигаются влево и, наоборот, при включении контактора КПП — система двигается вправо.
Нажатием на одну из кнопок К1...К5 кряж передвигается до соответствующего положения 1', 2', 3', 4', 5' и останавливается при набегании соответствующей щетки на изолированный участок 4. Цепь контактора КПЛ при этом разрывается и кронштейн 1 с кряжем 8 останавливается.
Другая система автоматического устройства для перемещения и установки кряжа в заданную плоскость пропила приведена на рис. 70,г. Кроштейн 2 с зажатым кряжем 1 крючьями 3 перемещается при помощи зубчатых реек 4, шестерен 5, вала 8 и червячного редуктора 7, приводимых в действие электродвигателем 6. От вала 8 через цепную передачу 9 вращение передается электромагнитной муфте 10, ведомая часть которой имеет диск с упором 11. На пульте управления оператор рукояткой 14 заказывает величину поперечного перемещения кряжа. При этом поворачивается ротор сельсина- датчика 15 на угол, соответствующий заданному размеру перемещения кряжа. На такой же угол поворачивается ротор сельсина-приемника 12 с диском и микропереключателем 13. Одновременно с этим включаются электродвигатель 6 и электромагнитная муфта 10. Кряж начинает перемещаться, а упор 11 поворачиваться. При встрече упора 11 с микропереключателем 13 электродвигатель 6 и муфта 10 отключаются, кряж 91 останавливается, а диск с рукояткой 14 под действием пружины возвращается в исходное положение.

Рис. 70. Схемы механизмов поперечного перемещения: а —при помощи шестерни и рейки, б — при помощи гидроцилиндра; в — при помощи винта и гайки, г — то же при помощи сельсинов, д — дистанционное управление при помощи контактных пластин.
Для расчета механизма подачи необходимо определить силы, действующие на него. В процессе пиления необходимо преодолеть сопротивления, вызываемые силами резания, надвигания и трения. Равнодействующую R'o (см. рис. 61,а), силы резания Рр и реакции силы подачи Ри можно определить по аналогии с формулой (7), но направлена она в

где Rx — горизонтальная составляющая силы R'o;
т и m1 — масса распиливаемого лесоматериала и подающего устройства;
ω и ω1 — коэффициенты сопротивления движению для лесоматериала и транспортного устройства.
Силы Rx и Ry определяют в зависимости от углов Ѳ и γ. При подаче лесоматериала цепным транспортером по неподвижным направляющим (см. рис. 61, а):

где т2 — масса 1 м тягового органа транспортера, кг;
L — длина транспортера, м.
Если лесоматериал лежит на рабочих органах транспортера,
(ω=ω1),
то
Т=Rx+(mg+Ry+2m2gL)ω1

где т3 — масса пилы с рамой, кг;
ω2 — коэффициент сопротивления движению рамы по направляющим. При вращении пилы по часовой стрелке в формуле Ry берется со знаком плюс, против часовой стрелки — со знаком минус.
При качательном движении рамы станка (рис. 61, б) сопротивление подачи находится также из схемы действующих сил. Момент сил сопротивления подачи определяют из формулы

Так как Рu = т Рр, то

где
т’
— масса частей станка, поворачивающихся
при подаче пилы;
μ
— коэффициент трения в цапфах оси
качания рамы;
d1
—
диаметр цапфы.
Усилие
Та , которое необходимо приложить к
раме пилы в точке А
для преодоления сопротивления надвиганию
(подачи), равно
где
la
— расстояние от точки до оси вращения
рамы пилы.
Скорости
подачи и
и
и',
отнесенные соответственно к центру
бревна и к точке А
на раме пилы, равны
где
ω — угловая скорость вращения рамы
пилы, тогда
Точка
А
может быть и в другом месте рамы и даже
по другую сторону оси вращения О0.


lo — расстояние, характеризующее смещение центра пилы по отношению к центру распиливаемого лесоматериала;
Рр — усилие резания, определяемое по формуле;
т — коэффициент, зависящий от степени затупления пилы формула;
Мт — момент сил трения в цапфах оси качания рамы пилы;
Ѳ— кинематический угол встречи.

где
R
— радиус пилы. Момент сил трения


14.Виды резания древесины. Определение усилия резания одиночным резцом.
Процесс резания заключается в том, что резец, двигаясь по направлению х—х (рис. 17.1, а) внедряется в древесину и отделяет одну ее часть от другой. В зависимости от размеров отделяемой части резание может быть с образованием стружки или щепы или без образования стружки.
Резание с образованием стружки. Получаемая в процессе резания стружка характеризуется толщиной е, измеряемой по оси у—у, длиной / по оси х—х и шириной b — по оси z—z. Для отделения стружки определенных размеров необходимо иметь движение резания и движение надвигания.
Движением резания называется движение резца по отношению к обрабатываемому материалу по оси х—х, при котором происходит отделение стружки. Оно, как правило, придается резцу и только в исключительных случаях обрабатываемому материалу. Скорость движения резания

Рис. 17.1. Резание резцом
v = vp±v0, (17.2)
где v ![]() —
скорость движения резца в направлении
оси х—X;
v
—
скорость движения резца в направлении
оси х—X;
v ![]() —
проекция на ту же ось скорости движения
обрабатываемого материала.
—
проекция на ту же ось скорости движения
обрабатываемого материала.
Так как vp всегда значительно больше v0, то в расчетах принимают скорость резания равной скорости резца, т. е. v = vp. Движение резца может быть прямолинейным или криволинейным, вращательным. Прямолинейное движение происходит при постоянной или переменной скорости. Последнее наблюдается при поступательно-возвратном движении резца.
Для
получения стружки определенной толщины
обрабатываемому материалу (или резцу)
придается движение надвигания. Оно
направлено под углом ![]() в
плоскостихОу, причем
0°<
в
плоскостихОу, причем
0°< ![]() <
<180°. Это движение производится
одновременно с резанием или перед его
началом. В последнем случае оно носит
характер установочного движения,
чередующегося с движением ре-замия.
Движение надвигания, производимое
одновременно с резанием, изменяет
толщину стружки, которая зависит от
величины и направления скоростиvH. Если
она составляет с осью х—х угол
<
<180°. Это движение производится
одновременно с резанием или перед его
началом. В последнем случае оно носит
характер установочного движения,
чередующегося с движением ре-замия.
Движение надвигания, производимое
одновременно с резанием, изменяет
толщину стружки, которая зависит от
величины и направления скоростиvH. Если
она составляет с осью х—х угол ![]() ,
то проекции ее на осих—х и у—у будут
,
то проекции ее на осих—х и у—у будут
![]() ,
, ![]() (17.3)
(17.3)
Скорость vo характеризует движение в плоскости х—х, т. е. в направлении траектории резца. Это движение называется продольным надвиганием. Скорость этого движения v0 алгебраически складывается со скоростью резания (формула 17.2). Поскольку движение продольного надвигания увеличивает или уменьшает длину стружки, а вместе с тем и длину обрабатываемой поверхности за один ход резца, то его можно назвать движением продольной подачи. Оно лежит в одной плоскости с движением резца и не оказывает влияния на толщину стружки.
Проекция
скорости движения надвигания на
ось у—у (вектор ![]() ) приводит
к увеличению толщины стружки, снимаемой
резцом. Это движение называется нормальным
надвиганием, так как вектор 'нормален
к траектории резца. Толщина
стружки е, измеряемая
по нормали к этой траектории, т. е. к
оси х—х, пропорциональна
величине va:
) приводит
к увеличению толщины стружки, снимаемой
резцом. Это движение называется нормальным
надвиганием, так как вектор 'нормален
к траектории резца. Толщина
стружки е, измеряемая
по нормали к этой траектории, т. е. к
оси х—х, пропорциональна
величине va:
e
= vat0 или e
= t0vHsin ![]() .(17.4)
.(17.4)
Ширина обрабатываемой поверхности за один ход резца равна ширине стружки b, измеряемой по оси z—z. Если требуется обработать поверхность, имеющую ширину В>b, то необходимо повторное движение резца. С этой целью материал или резец смещают по оси z—z.Такое движение в плоскости резания, т. е. в плоскости xOz по z—z называется движением боковой или поперечной подачи. Резание с образованием стружки может происходить по одной, двум и трем поверхностям обработки.
В первом случае (рис. 17.1,6) длина передней режущей кромки (лезвия) резца больше ширины обрабатываемой поверхности и резание производится только этой кромкой. Во втором случае (рис. 17.1, в) длина лезвия меньше ширины обрабатываемой поверхности, поэтому обработка материала начинается с края его поверхности и резание ведется по двум плоскостям передней и боковой режущими кромками. Если целью обработки является получение паза в обрабатываемом материале (рис. 17.1,г), то резание происходит по трем плоскостям, в нем участвуют передняя и обе боковые режущие кромки.
Различают простое и сложное резание с образованием стружки. Основными условиями простого резания являются: выполнение резания только передней режущей кромкой резца, длина ее должна быть больше ширины обрабатываемого материала (см. рис. 17.1,6); постоянная скорость резца; перпендикулярность режущей кромки прямолинейной траектории резца; постоянная толщина стружки по всей ее длине и ширине; определенное положение плоскости резания по отношению к направлению волокон.
В зависимости от положения плоскости резания по отношению к волокнам различают три вида простого резания: в торец, вдоль и поперек волокон. При резании в торец (рис. 17.2, а) плоскость обработки и направление движения резания перпендикулярны направлению волокон, которые расположены по оси у—у, а движение резания по оси х—х. В этом случае волокна разрушаются по их длине.
При резании вдоль волокон (рис. 17.2,6) плоскость резания xOz и направление движения резца совпадают с направлением волокон, идущих по оси х—х. Стружка отделяется по плоскости Ох вследствие разрыва связей между волокнами и излома по плоскости ОМ,проходящей поперек волокон. Резание поперек волокон (рис. 17.2, в) происходит при движении резца поперек волокон в их плоскости. В этом случае волокна древесины лежат в плоскости резания xOz и их направление совпадает с осью z—z. Отделение стружки происходит по плоскости Ох и поверхности ОМ вследствие нарушения связи между волокнами.
Нарушение любого из условий простого резания вызывает появление сложного резания, которое характеризуется одновременной обработкой двух-трех поверхностей, переменной скоростью резца, криволинейной траекторией его движения, переменной толщиной стружки, расположением плоскости резания под разными углами к направлению волокон и т. д.
Усилие
резания.В
процессе резания к резцу прикладывается
усилие Р, величина
которого зависит от сопротивления
резанию. Сопротивление резанию зависит
от различных взаимосвязанных факторов,
основными из которых являются строение,
физико-механические свойства древесины
и параметры резца. В процессе резания
(см. рис. 17.2, а) резец своей передней
режущей кромкой сминает и разрушает
древесину, отделяя стружку по
плоскости ОС. Одновременно
он давит на стружку передней гранью ОА и
деформирует ее. Усилие РР,
приложенное к резцу, достигает наибольшего
значения при внедрении резца на
глубину 10 и
падает до наименьшего значения в момент
отделения стружки по плоскости ОМ. Усилие
РР по
абсолютной величине равно равнодействующей
сил сопротивления резанию, действующих
на резец со стороны древесины. К ним
относятся: Рл —
усилие на лезвии резца; N ![]() и
N
и
N ![]() нормальное
давление, производимое на переднюю и
на заднюю грань резца со стороны
древесины;F
нормальное
давление, производимое на переднюю и
на заднюю грань резца со стороны
древесины;F ![]() и F2—
силы трения на этих гранях как
следствие нормального давления.
и F2—
силы трения на этих гранях как
следствие нормального давления.

Рис. 17.2. Виды резания
Усилие на передней режущей кромке представляет собой сопротивление, оказываемое волокнами древесины, отделению стружки по плоскости резания. Величина его зависит от ширины стружки, степени заострения резца и от сопротивления сил связи, соединяющих волокна в плоскости обработки. Чем острее резец, тем меньше Рл.
Усилие на лезвии резца
![]() (17.5)
(17.5)
где ![]() —
удельное сопротивление срезанию
(перерезанию) волокон, приходящееся
на единицу длины лезвия резца или ширины
стружки, Н/мм;b -—
ширина стружки, мм.
—
удельное сопротивление срезанию
(перерезанию) волокон, приходящееся
на единицу длины лезвия резца или ширины
стружки, Н/мм;b -—
ширина стружки, мм.
Нормальное давление на переднюю грань резца N\ оказывает наибольшее влияние на величину равнодействующей сил сопротивления резанию Рр, так как отделение стружки происходит в результате деформации древесины, вызванной давлением N1 производимым передней гранью резца на стружку. Поэтому величина N1 зависит от площади поперечного сечения стружки и сил связи волокон в плоскости перпендикулярной поверхности обработки.
Давление на переднюю грань резца
![]() (17.6)
(17.6)
где ![]() —
удельное сопротивление связи волокон
в плоскости отделения стружки,
Н/мм2, b и е —
ширина и толщина стружки, мм.
—
удельное сопротивление связи волокон
в плоскости отделения стружки,
Н/мм2, b и е —
ширина и толщина стружки, мм.
Направление
силы ![]() зависит
от угла
зависит
от угла![]() .
Чем больше этот угол, тем больше проекция
силы
.
Чем больше этот угол, тем больше проекция
силы![]() на
осьх—х и
меньше на ось у—у.Отделение
стружки происходит главным образом под
действием вертикальной составляющей
на
осьх—х и
меньше на ось у—у.Отделение
стружки происходит главным образом под
действием вертикальной составляющей ![]() ,
а сопротивление резанию возрастает
вместе с горизонтальной составляющей
этой силы. Поэтому для уменьшения
сопротивления резанию следует принимать
возможно меньшее значение угла резания
,
а сопротивление резанию возрастает
вместе с горизонтальной составляющей
этой силы. Поэтому для уменьшения
сопротивления резанию следует принимать
возможно меньшее значение угла резания![]() .
.
Давление N2, производимое
древесиной на заднюю грань резца, вызвано
упругой деформацией волокон. Величина
его неизвестна, но вместе с тем установлено,
что при работе с затупленным резцом
давление N2 больше,
чем при остром. Кроме того,
давление N2возрастает
с уменьшением заднего угла а, так как
увеличивается площадь контакта задней
грани резца с древесиной. Для уменьшения
давления N2 следует
увеличивать угол а. Силы
трения ![]() и
и![]() , где
, где ![]() —
коэффициент трения резца о древесину.
—
коэффициент трения резца о древесину.
Составляющая
усилия Рр направленная
по оси х—х против
движения резца является сопротивлением
резанию ![]() . Усилие
равное по величине сопротивлению
резания
. Усилие
равное по величине сопротивлению
резания ![]() совпадающее
с направлением движения резца, называется
усилием резания. Составляющая усилия
Рр по
оси у—у —
сила Р0 называется
силой отжима, если она направлена от
поверхности обработки к резцу, и силой
прижима, если она действует в обратную
(к поверхности обработки) сторону.
Отжим резца происходит при тонкой
стружке, большом угле резания и тупом
резце, в противных случаях наблюдается
прижим резца. Для острых резцов сила
Р0 =
(0,4.. .0,6)
совпадающее
с направлением движения резца, называется
усилием резания. Составляющая усилия
Рр по
оси у—у —
сила Р0 называется
силой отжима, если она направлена от
поверхности обработки к резцу, и силой
прижима, если она действует в обратную
(к поверхности обработки) сторону.
Отжим резца происходит при тонкой
стружке, большом угле резания и тупом
резце, в противных случаях наблюдается
прижим резца. Для острых резцов сила
Р0 =
(0,4.. .0,6) ![]() а
для затупленных Р0=
(0,6.. .1)
а
для затупленных Р0=
(0,6.. .1) ![]()
Горизонтальные
проекции сил N2 и F2 направлены
в противоположные стороны, поэтому
величина усилия ![]() зависит
от сил
зависит
от сил![]() и
Рл:
и
Рл:
P1 =
PJl+N1(sin ![]() +
+![]() cos
cos![]() ).(17.7)
).(17.7)
Обозначив N1(sin ![]() +
+![]() cos
cos![]() )=
)=![]() и
подставив значения Рл и
и
подставив значения Рл и ![]() из (17.5)
и (17.6), получим
из (17.5)
и (17.6), получим
![]() (17.8)
(17.8)
Величина ![]() зависит
от направления действия силы
зависит
от направления действия силы![]() , т.
е. от угла резания
, т.
е. от угла резания ![]() ,
как и величина
,
как и величина ![]() .
Поэтому принимают
.
Поэтому принимают ![]()
![]() =Кс,причем
значение Кс выбирают
в зависимости от угла б. Тогда
=Кс,причем
значение Кс выбирают
в зависимости от угла б. Тогда
Р1 = КлЬ + КсЬе = КЬе.
При этом
![]() (17.20)
(17.20)
где Кс — удельное сопротивление резанию, Н/мм2.
Определить значение Кл весьма трудно, поэтому его влияние на основании экспериментальных данных учитывают коэффициентом ае.Тогда
К = Кс ав, (17.11)
где ае — коэффициент, учитывающий влияние толщины стружки на удельное сопротивление резанию К, значение которого при прочих равных условиях уменьшается с увеличением толщины стружки е.
Величина
![]()
имеет отвлеченное значение, несмотря на то, что толщина стружки е — линейная величина. Показатель степени т — зависит от вида резания, при резании в торец т =0,33, а при продольном и поперечном резании т =0,5.. .0,55
В (17.11) Кс— удельное сопротивление резанию для сосны, Н/мм2. Его величина принимается на основании экспериментальных данных для острых резцов, толщине стружки е= 1 мм, влажности древесины W= 15 %, с учетом угла и вида резания.
Наименьшее значение он имеет при поперечном резании, поскольку в этом случае плоскость резания образуется вследствие нарушения слабой связи между волокнами. При продольном резании вдоль волокон величина Кс" имеет промежуточное значение по сравнению с предыдущими случаями.
На удельное сопротивление резанию К оказывает влияние порода, влажность древесины, степень затупления резца.
В общем случае
![]() (17.13)
(17.13)
где ап, а„ и а3 — коэффициенты, учитывающие изменения удельного сопротивления резанию Кс в зависимости от породы, влажности древесины и степени затупления резца.
При сложном резании одним резцом усилие резания также определяется по (17.9) и (17.13), при этом значение Кс будет отличаться от его значений при простом резании: оно будет зависеть от условий сложного резания, т. е. от числа плоскостей резания и наклона их к направлению волокон.
Резание без образования стружки. В процессе резания без образования стружки резец (нож), двигаясь в направлении перпендикулярном волокнам древесины, перерезает их передней режущей кромкой, осуществляя резание в торец или близкое к нему. Движение резания придается резцу (рис. 17.3, а, в) или перерезаемому материалу (рис. 17.3,6). При этом способе резания наблюдаются смятие и изгиб волокон, вызывающие расслоение древесины. Резание без образования стружки применяется при срезании стоящих деревьев (см. рис. 17.3,а), перерезании хлыстов (см. рис. 17.3,0) и сучьев (см. рис. 17.3,6). Усилие резания без образования стружки зависит от угла заточки р" и других параметров резца и размеров поперечного сечения перерезаемых материалов. Исследования этого процесса показали, что наибольшее значение усилия резания достигает при внедрении резца (ножа) на глубину ½ … 2/3 диаметра ствола или сучка. Величина этого усилия (Н) может быть определена по следующей эмпирической формуле:
Р = a a6 an a3 d2 n, (17.15)
где d — диаметр перерезаемого ствола, сучка, мм; п — число одновременно перерезаемых сучков, для стволов п=1; а — коэффициент, учитывающий физико-механические свойства древесины; для сучьев а=35, для стволов а=25; а., ап, а3 — коэффициенты, учитывающие влияние угла резания, породы дерева и степени затупления резца (ножа); ав = 1...1,4.

Рис. 17.3. Резание без образования стружки
15.Устройство шпалоокорочных станков, назначение. Схемы применения.
Шпалоокорочный станок ЛО-44(рис. 23.7, а) относится к окорочным станкам с периодической поперечной подачей и предназначен для окорки боковых и обзольных поверхностей шпал. Каретка станка имеет барабанную ножевую головку с приводом и перемещается по направляющим с помощью ка-натно-блочной системы. Скорость каретки переменная и регулируется гидравлическим универсальным регулятором УРС-2,5, обеспечивающим также реверсивное движение каретки. Для закрепления шпалы с торцов и поворота ее используются специальные зажимный и поворотный механизмы с гидроприводом. После окорки шпала поступает на приводной роликовый лесотранспортер, расположенный ниже направляющих каретки.

Рис. 23.7. Схемы шпалоокорочных станков с барабанной ножевой головкой:
а — станок ЛО-44: / — каретка; 2, 3 — направляющие и привод каретки; -/ — барабанная ножевая головка; 5, 6 — механизм зажима и поворота шпалы,; 7 — шпала; б — станок ЛО-48: / — барабанная ножевая головка; 2 — приводные вальцы; 3 — привод вальцов,; 4 — прижимные вальцы; 5 — шпала; 6, 7 — коническая и цепная передачи
Скорость перемещения каретки от 0 до 0,95 м/с, ход ее 4,5 м, угловая скорость барабанной ножевой головки 420 рад/с, общая установленная мощность 15,9 кВт.
Окорка шпал на станке ЛО-44 протекает следующим образом. Шпала подается в зажимное устройство станка, закрепляется с торцов и устанавливается поворотным механизмом' в определенное положение. После этого барабанную головку подводят к окоряемой поверхности и одновременно сообщают каретке движение вдоль шпалы. В случае неполного удаления коры с окоряемой поверхности шпалы ее можно, поворачивая, установить так, чтобы при повторном перемещении барабанной головки оставшаяся кора была бы удалена. После полной обработки шпала приводным роликовым лесотранспортером подается на сортировочное устройство.
Шпалоокорочный станок ЛО-48(рис. 23.7, б) относится, к станкам непрерывного действия. В отличие от станка ЛО-44 этот станок имеет две восьминожевые барабанные головки, которые охватывают шпалу с боков, прижимаясь к окоряемым поверхностям. В зависимости от поперечного сечения шпал и формы окоряемой поверхности барабанные головки могут отклоняться и поворачиваться в плоскости перпендикулярной оси шпалы. Каждая барабанная головка приводится во вращение электродвигателем мощностью 5,5 кВт, через ременную передачу, угловая скорость головки 103 рад/с. Механизм продольного перемещения шпалы имеет шесть приводных вальцов (четыре из них с ребристой поверхностью) и три верхних прижимных вальца. Скорость движения шпал 0,3 м/с, мощность двигателя 3 кВт. Поступающие по роликовому транспортеру шпалы подаются вальцами к барабанным головкам, которые подводятся к окоряемой поверхности оператором станка.
16.Типы круглопильных станков периодического действия для поперечной распиловки лесоматериалов.
Станки и установки для поперечной распиловки могут быть с непрерывным и периодическим надвиганием. Непрерывное надвигание применяют, если число пил, установленных на станке, равно числу пропилов, необходимых для полной распиловки лесоматериала по длине на несколько частей, или больше этого числа. При периодическом надвигании боковая подача чередуется с надвиганием и пилением. Движение боковой подачи возможно только после того, как пила удалена из пропила, поэтому перед подачей необходимо колебательное движение пилы или распиливаемого материала, т. е. после рабочего хода надвигания, при котором происходит пиление, необходим обратный ход. В связи с этим в круглопиль-ных станках для чередования надвигания с обратным ходом применяют различные механизмы, надвигания периодического действия.
Станки с периодическим надвиганием (периодического действия) могут быть двух типов: с надвиганием пилы на распиливаемый материал (см. рис. 19.3, е, ж) и с надвиганием материала на пилу. На практике широкое применение получили станки с надвиганием пилы на распиливаемый материал, в которых пила установлена на качающейся раме (рис. 20.1, а, б, в, г, д), и реже — с поступательно-возвратным движением рамы (см. рис. 19.3, е и 20.1, е). Установки периодического действия, кроме круглопильного станка, имеют еще механизмы боковой или поперечной подачи, прижима, разметки и остановки распиливаемого материала.
|
|

Рис. 20.1. Типы круглопильных станков периодического действия
Для поперечной распиловки лесоматериалов применяют балансирные и маятниковые станки с качающейся рамой. К балансирным станкам с надвиганием пилы сверху на распиливаемый материал относятся АЦ-2М, АЦ-1, ЦБ-4, а с надвиганием снизу — ЦКБ-40; к маятниковым станкам с нижней осью качания рамы относится станок АЦ-ЗС, а с верхней осью качания — ДО-5.
Поустройству круглопильные станки с качающейся рамой различают по числу пил, по положению оси вращения пилы поотношению к раме и по направлению надвигания относительно центра пилы. По числу пил они могут быть однопильные и двухпильные. Обычно применяют станки с одним пильным диском и редко с двумя. В последнем случае пильные диски устанавливают на двух параллельных валах с вращением дисков в одной плоскости для образования одного пропила (см. рис. 20.1, д), при этом пилы могут быть одинакового или разного диаметров. По положению оси вращения пилы различают три варианта: ось вращения пилы находится под качающейся рамой (см. рис. 20.1, а), над ней (см. рис. 20.1, б), рама располагается под небольшим углом к горизонтальной плоскости (см. рис. 20.1,в, г, д).
Станки с верхним или нижним положением оси вращения рамы (точки Оо) называются маятниковыми станками с верхней (см. рис. 20.1,а) или нижней (см. рис. 20.1, б) опорой. У станков с положением рамы близким к горизонтальному качающаяся рама уравновешивается посредством грузовых балансиров, помещенных на свободном конце рамы, поэтому такие станки называются балансирными (см. рис. 20.1, в, г, д). У балансирных станков распиливаемый материал может находиться под пилой (см. рис. 20.1, в, д) и пила надвигается сверху или над пилой (см. рис. 20.1, г)—пила надвигается снизу. Станки с качающейся рамой могут быть с тангентальным и радиальным надвиганием. При тангентальном надвигании траектория центра пилы всегда находится на некотором расстоянии от центра бревна, называемом эксцентриситетом ео (см. рис. 20.1,а). При радиальном надвигании е0 = 0 (см. рис. 20.1,б, в, г).
У
маятникового станка пила надвигается
на распиливаемый материал сбоку и, так
как она движется по отношению к центру,
бревна в тангентальном направлении,
путь ее надвигания может быть большим.
Это дает возможность за один рабочий
ход станка распиливать одновременно
несколько бревен. В практике это
свойство маятникового станка используют
для увеличения его производительности,
когда под пилу подается одновременно
по нескольку бревен, уложенных в один
ряд. У маятниковых станков с верхним
положением оси вращения рамы ![]() >0,
поэтому путь надвигания, необходимый
для распиливания бревна, больше его
диаметра (см. рис.17.7,д), но
вместе с тем наибольшая высота пропила
меньше диаметра бревна, вследствие чего
потребное для надвигания усилие
уменьшается. У всех балансирных станков,
как с надвиганием на распиливаемый
материал сверху, так и снизу, движение
надвигания происходит в радиальном
направлении, т. е. ео=0, поэтому путь
надвигания и высота пропила равны
диаметру распиливаемого бревна. Путь
надвигания при е0=0
весьма ограничен, он не может быть больше
D-d
>0,
поэтому путь надвигания, необходимый
для распиливания бревна, больше его
диаметра (см. рис.17.7,д), но
вместе с тем наибольшая высота пропила
меньше диаметра бревна, вследствие чего
потребное для надвигания усилие
уменьшается. У всех балансирных станков,
как с надвиганием на распиливаемый
материал сверху, так и снизу, движение
надвигания происходит в радиальном
направлении, т. е. ео=0, поэтому путь
надвигания и высота пропила равны
диаметру распиливаемого бревна. Путь
надвигания при е0=0
весьма ограничен, он не может быть больше
D-d ![]() /2(D —
диаметр пилы и do —
диаметр фланца или шкива), поэтому
одновременное распиливание нескольких
бревен затруднено, а часто и невозможно.
/2(D —
диаметр пилы и do —
диаметр фланца или шкива), поэтому
одновременное распиливание нескольких
бревен затруднено, а часто и невозможно.
У станков с качающейся рамой радиус качания R0, измеряемый от оси вращения рамы Оо до оси вращения пилы О (см. рис. 20.1) выбирают в зависимости от направления надвигания и типа станка. У маятниковых станков с верхним положением оси вращения рамы, имеющих тангентальное надвигание, необходим больший путь надвигания, чем у балансирных станков. Поэтому для таких маятниковых станков RQ = = 1,5...3 м или примерно R0/D=l.. .2 (D — диаметр пильного диска). У маятниковых станков с нижним положением оси вращения рамы надвигание пилы, как правило, радиальное, поэтому, как и у балансирных станков, путь надвигания у них небольшой и радиус качания R0 принимают также небольшим по величине в пределах от 0,8 до 1,6 м или примерно RqID = -0,75...1,1.
Качающиеся рамы круглопильных станков изготовляют металлические, литой или сварной конструкции. На одном конце рамы балансирного станка устанавливается электродвигатель, а на другом — пильный вал с опорами и пилой. Для уравновешивания рамы на ней помещают груз, допускающий перемещение по ее длине. Пильный вал приводится в движение ременной передачей. Для натяжения ремней электродвигатель устанавливают на салазки или на особую качающуюся опору, укрепленную шарнирно на конце рамы станка.
В маятниковых станках с нижней осью качания электродвигатель устанавливается на неподвижной опоре соосно с осью качания рамы станка. Натяжение ремней осуществляется путем смещения опор пильного вала. В маятниковых станках с верхней осью качания электродвигатель может устанавливаться на раме подвижно, как у балансирных станков, или неподвижно, тогда приводные ремни пильного вала натягиваются так же, как у маятниковых станков с нижней осью качания.
17.Устройство лесотранспортера с гибким тяговым органом. Определение тягового усилия и полного натяжения тягового органа лесотранспортера.
Транспортеры подразделяются по типу тягового устройства, виду лесного груза и способу его перемещения. По типу тягового устройства различают: транспортеры с гибким тяговым органом, винтовые, роликовые транспортеры, водяные транспортные лотки и пневматические транспортные установки.
|
|

|
Рис. 9.1. Схема транспортера с гибким тяговым органом: / — тяговый орган; 2 - рабочий орган,; 3 — тяговое (ведущее) колесо; 4 — неподвижные опоры; 5 — направляющее колесо; 6 — натяжное устройство; 7 — привод |
Наиболее распространенным типом транспортного устройства непрерывного действия являются транспортеры с гибким тяговым органом, в качестве которого применяют цепь, ленту или канат. Общая схема транспортера с гибким тяговым органом представлена на рис. 9.1 и включает замкнутый тяговый орган, два концевых колеса, натяжное устройство, неподвижные опоры и привод. Тяговый орган огибает концевые колеса, на нем для захвата груза закреплены рабочие органы. Концевое колесо приводящее в движение тяговый орган называется тяговым или ведущим, а колесо, только изменяющее направление движения тягового органа, носит название направляющего. Обе ветви тягового органа или одна из них поддерживаются неподвижной опорой. Для натяжения тягового органа применяют натяжное устройство. Движение ведущему колесу и через него тяговому органу передается от привода транспортера.
Тяговый орган приводит в движение перемещаемый груз. В процессе работы он огибает концевые колеса, поэтому должен быть достаточно гибким, прочным, иметь малый вес и быть удобным для прикрепления к нему рабочего органа. Всем этим требованиям в той или иной мере отвечают цепи, ленты и проволочные канаты. Наибольшее распространение имеют цепи, конструкцию которых приспосабливают к типу транспортного устройства. Они более гибки, чем канаты и ленты, более прочны и удобны для прикрепления к ним рабочих органов. К недостаткам их относят сравнительно большой вес и неравномерность движения, что вызывает динамические нагрузки и ограничивает возможность применения больших скоростей. Ленты и канаты менее приспособлены к условиям работы тягового органа, к ним трудно прикреплять рабочие органы, они обладают большей жесткостью* а ленты, кроме того, имеют и малую прочность.
Перед работой тяговый орган — цепь, канат или ленту натягивают с силой So, представляющей собой первоначальное, или монтажное, натяжение, создаваемое с помощью натяжного устройства. К тяговому органу во время движения от ведущего колеса передается тяговое усилие Т, поэтому натяжение тягового органа в любой точке по его длине равно
Sn = Tn + S0, (9.52)
где Гп и Sn — тяговое усилие и натяжение в точке п.
Тяговое
усилие в конце какого-нибудь участка
тягового органа равно сумме
сопротивлений на этом участке ![]() и
тягового усилия в начале этого участка
и
тягового усилия в начале этого участка![]() т.
е.
т.
е.
![]() (9.53)
(9.53)
Таким образом, тяговое усилие в какой-либо точке тягового органа есть сумма сопротивлений предшествующих участков этого органа. Тяговый орган работает на растяжение, поэтому тяговое усилие не может быть отрицательным, если даже сопротивления будут отрицательными, поэтому необходимо определить порядок суммирования сопротивлений. Для того чтобы тяговое усилие всегда было положительным, необходимо начать суммирование сопротивлений от той точки тягового органа, где тяговое усилие равно нулю, а натяжение тягового органа наименьшее, т. е. Sn = So.
В горизонтальных транспортерах такой нулевой точкой для тягового усилия будет точка сбегания тягового органа с ведущего колеса. В транспортерах с наклонными участками, сопротивление на этих участках может быть положительным и отрицательным. Если ца нижней ветви (см. рис. 9.7, а) сопротивление P1-2 >0, т. е. положительно, то нулевой точкой в этом случае будет точка 1 и Т1 = 0. Напротив, если P1-2 <0 и сопротивление P1-2 отрицательно, то тяговое усилие будет равным нулю в точке 2, т. е. Т2 = 0.
Таким образом, для определения тягового усилия и суммирования сопротивлений необходимо определить знак суммы сопротивлений холостой ветви тягового органа и по этому знаку установить положение нулевого значения тягового усилия. От этой нулевой точки и суммируются сопротивления движению отдельных участков.
Для схемы на рис. 9.7, а нулевое значение тягового усилия возможно в точке / или 2. Для первого случая, когда P1-2 >0 или wL>H,— нулевая точка 1, поэтому Т1 = 0 и натяжение S1 = S0. Тяговое усилие в точке 2 T2 = P1-2 и натяжение S2 = P1-2 + S0. Тяговое усилие в точке 3 равно сумме сопротивлений на криволинейном участке 2—3 и тягового усилия в точке 2, т. е. Тз = P2-3 + Т2 или Тз = P1-2 + P2-3. Так как участок 2—3 криволинейный, то сопротивление на нем является сопротивлением направляющего колеса, т. е. P2-3 =Pн и Sн= S2 поэтому P2-3= CKS2 или P2-3= CK(P1-2 + So). Тяговое усилие в точке 4 Т4=Т3 + P3-4, т. е.
Т4= P1 - 2 + P2 - 3 + P3 – 4 или
Т4= P1 - 2 + CK(P1-2 + So). + P3 – 4
Подставив
значения P1-2
и P3-4 из ![]() и
и![]() ,
получим
,
получим
Т4 = ![]() +
+![]() +
CK [
+
CK [ ![]() +So]
(9.54)
+So]
(9.54)
Наибольшее тяговое усилие будет в точке 4, т. е. в точке набегания тягового органа на ведущее колесо. График изменения тягового усилия по длине тягового органа между точками 1, 2, 3 и 4 приведен на рис. 9.8, а. Из него видно, что тяговое усилие в точке 4 для первого случая равно сумме сопротивлений на трех участках.
В формуле (9.54) первое слагаемое 2qTwL представляет собой сопротивление движению самого тягового органа, коэффициент 2 указывает, что в расчет принята сумма длин обеих ветвей тягового органа. Второе слагаемое qг{wL + H)—сопротивление движению перемещаемого груза, в котором qгwL — сопротивление трения и qгH — сопротивление подъема. Третий и последний член с коэффициентом Ск представляет собой сопротивление направляющего колеса. Так как третье слагаемое составляет 1... 2 % от общего тягового усилия, то для приближенных расчетов можно принять Ск = 0 и тогда
|
|

Рис. 9.7. Расчетные схемы для определения сопротивления движению
T4==2q ![]() wL
+ qг(wL+H). (9.55)
wL
+ qг(wL+H). (9.55)
Для второго случая, когда P1-2 <0 или wL<H, суммирование сопротивлений следует вести от точки 2, так как для нее тяговое усилие Т2= 0 и натяжение S2 = S0. Тяговый орган на участке 1—2, двигаясь вниз под действием силы тяжести, будет производить натяжение в точке 1, равное T1 = P1-2 или Т2 = - qт(wL - H).). Тяговое усилие в точке 3 Т3 = P2 - 3, где P2 - 3 — сопротивление криволинейного участка 2—3, т. е. сопротивление направляющего колеса, определяемое по формуле P2 - 3 = Pк = СКS2; так как S2 = So, то P2 - 3 = CKS0и T3 = CKSo.
Тяговое
усилие в точке 4 при
набегании тягового органа на ведущее
колесо составит T4 =
Тз + P3
– 4 или
Т4 =
P2
- 3 +
P3
– 4 .Подставив
значение P3
– 4 из ![]() получим
получим
Т4= CKSo+ ![]()
![]() (9.56)
(9.56)
Следовательно, для второго случая, когда P1-2 <0, тяговое усилие в точке 4 равно сопротивлению только двух участков 2—3 и 3—4.График тягового усилия для этого случая представлен на рис. 9.8,6. Таким образом, при P1-2>0 и P1-2 <0 тяговое усилие Т4 в точке 4имеет разное значение.
Более сложная схема транспортера представлена на рис. 9.8, в. Она отличается от предыдущей (см. рис. 9.7, а) тем, что на обеих ветвях для изменения направления движения тягового органа имеются шины А и В выпуклого профиля. Вследствие этого появляются дополнительные сопротивления движению Ра и Ръ, приложенные в точках А и В.
Приближенно
можно принять, что натяжение в
точке А равно Sa=
Ta+So, где Та = P1-
A, или
по формуле ![]() приSa =
0 Sa =
qTwL1 +
SQ. Следовательно,
принимая в формуле Рш= Cш Sн, при
Ра=Рш и Sn=Sa, получаем Pa=Cш(
приSa =
0 Sa =
qTwL1 +
SQ. Следовательно,
принимая в формуле Рш= Cш Sн, при
Ра=Рш и Sn=Sa, получаем Pa=Cш( ![]() wL
wL ![]() +So).Для
верхней ветви Pb
= Cш Sb, где Sb —
натяжение тягового органа в точке В, т.
е. Sb =
Tb + S0,
или Sb =
T3 + P2
- b+
S0 где T3 =
Cн S2 +
T2. Значение
усилия T2 в
точке 2 зависит
от знака суммы сопротивления движению
на нижней ветви. Если Т2 =P1-а +
Pа +
Pа-2 и
Т1=0.
+So).Для
верхней ветви Pb
= Cш Sb, где Sb —
натяжение тягового органа в точке В, т.
е. Sb =
Tb + S0,
или Sb =
T3 + P2
- b+
S0 где T3 =
Cн S2 +
T2. Значение
усилия T2 в
точке 2 зависит
от знака суммы сопротивления движению
на нижней ветви. Если Т2 =P1-а +
Pа +
Pа-2 и
Т1=0.
Так как P1-а + Pа-2 = P1-2 и P3-b + Pb-4 = P3-4 , то
Т4= P1-2 + P2-3 + P3-4 + Ра + Ръ (9.57)
Если P1-2 + Ра + Ръ <0, то Т2=0, T3 = CKSo
Т4=P2-3 + P3-4+ Ръ (9.58)
Схема транспортера, представленная на рис. 9.8, г, отличается от предыдущей наличием шин не только выпуклого А и В, но и вогнутого профиля С и D. Сопротивление движению по вогнутой шине будет отрицательным ипоэтому при расчете не учитывается. Расчет в этом случае ведется по спрямленному профилю 1—А—2 и3—В—4, как и при выпуклом профиле.
Если
нижняя ветвь транспортера провисает
(рис. 9.8, д) в
связи с отсутствием на участке 1—2 неподвижной
опоры, то на участке 1—2 ![]() =0и
сопротивление P1-2 всегда
отрицательно, т. е. P1-2 =
-qТн и
Тl=qTH. В
точке 2 тяговое
усилие Т2=0,
а тяговое усилие в точке 4определяется
по (9.56).
=0и
сопротивление P1-2 всегда
отрицательно, т. е. P1-2 =
-qТн и
Тl=qTH. В
точке 2 тяговое
усилие Т2=0,
а тяговое усилие в точке 4определяется
по (9.56).

Рис. 9.8. Расчетные схемы для определения тягового усилия
18.Устройство круглопильных станков периодического действия для продольной распиловки лесоматериалов.
Круглопильные станки периодического действия для продольной распиловки (рис. 21.2) имеют механизмы пиления и надвигания, а также механизмы поперечной подачи, зажима, поворота и центрирования.
Механизм пилениявключает пилу с пильным валом, приводимым во вращение электродвигателем, и тормоз. Для уменьшения трения пилы о стенки пропила за пилой ставят расклинивающий нож, а для снижения ее поперечной вибрации особое устройство — противовибратор. Отпиленные горбыли, доски, бруски падают на ленточный транспортер.
Усилие
резания для станков периодического
действия определяется по формуле e
= vat0 или e
= t0vHsin ![]() ,в
которой высота пропила принимается в
зависимости от схемы раскроя лесоматериалов.
,в
которой высота пропила принимается в
зависимости от схемы раскроя лесоматериалов.
Механизм надвиганияпредставляет собой тележку, на которой закрепляется лесоматериал, надвигаемый на пилу. Она перемещается по рельсовому пути канатом, приводимым в движение от барабана, который получает вращение от отдельного привода, не связанного с механизмом пиления, или от вала пилы через особый реверсивный механизм, состоящий из ременных и зубчатых передач. Рама тележки металлическая (рис. 21.3, а), установлена на двух или трех колесных парах в зависимости от ее длины. Колеса, расположенные ближе к пиле, имеют две реборды и выполняют роль направляющих. Рельсовый путь, как и колеса, определяет направление плоскости пропила. Необходимая длина рельсового пути в метрах составляет
/n = 2/6 + D + (0,5. . . 1,0), (21.1)
где /б—длина распиливаемого лесоматериала, D — диаметр пилы.

Рис. 21.2. Схема круглопильного станка периодического действия:
/ — круглая пила; 2 — расклинивающий нож,; 3 — канат; 4 — ленточный транспортер; 5— барабан; 6 — механизм привода тележки; 7 — рельсовый путь; 8 — противовибратор; 9 — тележка; 10 — шестерня; // —зубчатая рейка; /" — привод механизма поперечной подачи,; 13 — блок; 14 — механизм поворота (кантователь); 15 — механизм зажима; 16 — электродвигатель пилы; 17 — тормоз пилы
Для изменения направления движения тележки применяются реверсивные механизмы. Реверсивный механизм с двумя ременными передачами (рис. 21.4, а) приводится во вращение отвала пилы через двухступенчатый шкив. Оба ремня надеты на соответствующие шкивы свободно. При повороте рукоятки по часовой стрелке натяжной ролик натягивает ремень, охватывающий шкив меньшего диаметра, в результате чего барабан начинает вращаться, перемещая тележку в рабочем направлении. При повороте рукоятки против часовой стрелки натягивается ремень, охватывающий шкив большого диаметра, и тележка движется в обратном направлении (холостой ход). Изменяя натяжение, можно в определенных пределах изменять скорость движения тележки. Реверсивный механизм с одной ременной передачей (рис. 21.4, б) имеет фрикционную передачу с двумя

Рис. 21.3. Тележка круглопильного станка с механизмами зажима и поперечной подачи:
а — тележка: / — вертикальная стойка; 2 — горизонтальная направляющая; 3 —направляющее колесо с ребордами; 4 — поддерживающее колесо; 5 —шестерня; 6 — зубчатая рейка; 7 — механизм замера поперечной иодачи; 8 — зажимной крюк; б, в, г —•'" боковые механизмы зажима; д, е- -торцовые механизмы зажима
ведущими
фрикционными шкивами, вращающимися в
разные стороны. Если рычаг повернуть
по часовой стрелке, то тележка будет
перемещаться в рабочем направлении,
против часовой стрелки — в обратном
направлении. В том случае, когда барабан
приводится во вращение не от вала пилы,
а от индивидуального привода, изменение
направления движения тележки достигается
реверсом электродвигателя. Если пила
установлена на тележке (рис. 21.4, в), то
надвигание ее производится с помощью
полиспастов, приводимых в действие от
гидроцилиндров. Сопротивление движению
тележки определяется по T
= R'X +
(Q + G+R'y)w при ![]() =
450 ,
=
450 , ![]() ,
,![]() .
.
T= ![]() +
(Q + G)wт
+
(Q + G)wт
где Р — усилие резания на пиле; Q и G — вес кряжа и тележки (если на распиливаемый лесоматериал надвигается тележка с пилой, то Q=0) ayT = 0,l ...0,15.
В
период пуска тележки в ход сопротивление
ее движению возрастает за счет силы
инерции Pi, определяемой
по (19.19), и равно Tр =
Т + ![]() .
.
Мощность, необходимая для приведения тележки в движение при разгоне, составит
![]() (21.3)
(21.3)
где v ![]() —
скорость надвигания при установившемся
движении.
—
скорость надвигания при установившемся
движении.

Холостой ход
Рис. 21.4. Схемы механизмов реверсивного движения:
/ — вал пилы; 2 — двухступенчатый шкив,; 3 — натяжной ролик; 4 — барабан; 5 — зуб: чатая передача; 6 — фрикционные шкивы; 7—тележка с пилой; 8 — гидроцилиндр с полиспастом.
Разгон тележки происходит обычно до начала пиления лесоматериала.
Механизмы зажимаприменяют для закрепления лесоматериала на тележке. Они бывают бокового или торцового действия. В первом случае зажим в виде острого крюка внедряется в боковую поверхность материала в тангентальном направлении (см. рис. 21.3, б, в, г),во втором — материал закрепляется с торцов зажимами с клиновидными шипами (см. рис. 21.3, д, е). Боковые зажимы закрепляют распиливаемый материал по отношению к вертикальной стойке и горизонтальной направляющей, служащей опорой для стойки и кряжа. Поэтому зажимные крюки должны перемещаться в горизонтальном и вертикальном направлении в зависимости от размеров поперечного сечения распиливаемых лесоматериалов. Для вертикального перемещения крюков применяются цепные, винтовые и реечные механизмы с электроприводом или гидро- и пневмоцилиндрами (см. рис. 21.3, б, в, г). Горизонтальное перемещение крюков выполняется автоматически специальными устройствами, связанными с механизмом вертикального их движения. При торцовом закреплении кряжа применяются винтовые, реечные механизмы или гидро-и пневмоцилиндры (см. рис. 21.3, д, е).
При боковом зажиме для предохранения распиливаемого материала от сдвига и поворота к нему в двух или трех точках по его длине крюками зажима передается усилие S, которое определяют из условия возможного поворота распиливаемого материала около точки Опод действием усилия резания Р (см. рис. 21.3, в).
![]() (21.8)
(21.8)
где Q — вес материала; / — коэффициент трения качения его об опору.
Механизмы поперечной подачипредназначены для поперечных перемещений кряжа, необходимых при выполнении очередных параллельных пропилов. Кряж вместе с механизмомзажима перемещается по двум-трем неподвижным горизонтальным направляющим, укрепленным поперек тележки (см. рис. 21.2 и 21.3, а). Наибольшее распространение получили реечные механизмы поперечной подачи, рейки которых связаны с направляющими вертикальных стоек и приводятся в движение зубчатыми колесами от электропривода через передаточный механизм. Изменение направления движения реек, а вместе с ними и поперечного перемещения вертикальных стоек, достигается реверсированием электродвигателя. Такие механизмы поперечной подачи применимы при боковом и при торцовом зажиме кряжа. Величина поперечной подачи указывается на циферблате механизма замера, установленного на тележке.
Механизмы поворота используют, если в процессе распиловки материал необходимо повернуть вокруг своей оси для получения взаимно перпендикулярных пропилов. Для поворота кряжа при боковом его зажиме применяются цепные, реечные и сегментные кантователи. Цепной кантователь (рис. 21.5, а) поворачивает кряж движущейся цепью с зубьями. Цепь с помощью гидроцилиндра с демпфером подводится к боковой поверхности кряжа, и ее зубья, перемещаясь вверх, поворачивают кряж на необходимый угол. Распиливаемый материал подается на тележку специальным рычагом, прижимающим его к вертикальным стойкам. Реечный кантователь (рис. 21.5, б)имеет зубчатую рейку с гайкой и ходовой винт, вращаемый электродвигателем. При вращении винта зубчатая рейка перемещается вверх и поворачивает распиливаемый материал. Затем двигатель реверсируется и рейка опускается в исходное положение. Сегментный кантователь (рис. 21.5, в) состоит из двух ребристых сегментов, сидящих на одном валу, и привода. Сегменты имеют реверсивное вращение. Это позволяет не только подавать кряж на тележку (поз. /), но и поворачивать его (поз. //).
При торцовом зажиме кряжа один из зажимов свободно вращается на своей оси, а второй с помощью какого-либо механизма поворачивается вместе с зажатым кряжем. Поворотный механизм, оборудованный четырехконечным мальтийским крестом, представлен на рис. 21.5, г. Мальтийский крест имеет четыре крестообразно расположенных паза, в которые при повороте ведущего колеса поочередно входит палец водила. За один оборот ведущего колеса мальтийский крест, а вместе с ним и кряж, повернется на угол 90°. Для поворота на такой угол можно использовать рейку, находящуюся в зацеплении с ведомым зубчатым колесом, насаженным на поворотный вал механизма зажима. Для этой же цели можно использовать храповое колесо и зубчатую передачу. В последнем случае в качестве приводного механизма можно использовать силовой гидроцилиндр.
Механизмы центрирования. Прежде чем закрепить лесоматериал в торцовых зажимах, его устанавливают в определенное положение по отношению к ним. С этой целью применяют центрирующие устройства (рис. 21.5, д, е). Каждый из них имеет подъемные вилки, центрирующие поданный на них кряж в вертикальной плоскости, приводной механизм и конечный выключатель. При подъеме вилок происходит одновременное опускание конечного выключателя, укрепленного на конце стального каната или рычага. В момент соприкосновения выключателя с поверхностью кряжа подъем вилок прекращается, при этом ось кряжа любого диаметра занимает необходимое горизонтальное положение по отношению к торцовым зажимам. После зажима кряжа вилки опускаются, а выключатель поднимается, занимая исходное положение. Для подъема вилок могут применяться гидропривод, реечный механизм и др.

Рис. 21.5. Схемы механизмов поворота и центрирования:
а — цепной кантователь: /—цепь с зубьями; 2 — гидроцилиндр с демпфером; 3 — прижим; 6 — реечный кантователь: / — рейка; 2 — гайка; 3 — винт,; 4 — двигатель; в — сегментный кантователь: / — сегмент; 2— привод вала сегмента; г — поворотный механизм с мальтийским крестом: / — мальтийский крест; 2 — ведущее колесо с води-лом; д, е — механизм центрирования: / — центрирующие вилки; 2—конечный выключатель; 3 — гидроцилиндр; 4 — коромысло; 5 — рычаг; 6 — реечный механизм; 7 —
канат
19.Типы круглопильных станков непрерывного действия для продольной распиловки лесоматериалов, устройство, область применения.
Станки с непрерывным надвиганием применяют для продольной распиловки пиломатериалов, а иногда и для распиловки тонких круглых лесоматериалов. Конструкция этих станков приспосабливается к условиям распиловки, при этом большое значение имеют форма и размеры распиливаемого лесоматериала, его положение в процессе распиловки, необходимое число пропилов в нем. Они имеют механизмы пиления и надвигания, а также прижимные и направляющие устройства.
Механизм пиления.Станки с непрерывным надвиганием бывают однопильные и многопильные. В однопильных станках для получения повторных пропилов лесоматериал необходимо возвращать в первоначальное положение и надвигать повторно. У многопильных станков число пил соответствует необходимому числу пропилов, поэтому лесоматериал распиливается заодно надвигание. Пилы многопильных станков устанавливают на одном (рис. 21.6, а, б) или на разных валах, размещая их в шахматном порядке. В двухпильных станках одна из пил может перемещаться в осевом направлении вместе с диском (рис. 21.6, б). Это дает возможность выпиливать пиломатериалы различной ширины. Впереди пилы устанавливают гребенки, препятствующие выбрасыванию пилой распиливаемого лесоматериала, а за пилой расклинивающий нож.
Механизм надвигания.Для надвигания распиливаемого материала применяются роликовые и цепные (несущие и скребковые) транспортеры (см. рис. 19.3, б, в), а также горизонтальные и вертикальные питающие вальцы . В скребковых транспортерах движение от цепи к материалу передается упорами цепи, при этом цепь может располагаться ниже (рис. 21.6, в) или сбоку распиливаемого материала (рис. 21.6, г). Цепные несущие и скребковые транспортеры с нижним расположением цепи применяются обычно для распиловки лесоматериала по ширине, а скребковые с боковым расположением цепи — по толщине. У роликовых и цепных несущих транспортеров движение распиливаемому материалу передается силой трения его о ролики или цепь. Для увеличения силы трения применяют различные прижимные устройства, сохраняющие в то же время положение материала в процессе его распиловки. К ним относятся скользящие прижимы (рис. 21.6, д), гладкие или рифленые прижимные ролики (рис. 21.6, е). При работе с несущими цепными транспортерами в качестве прижимных устройств применяют также гу сеничные прижимы, удобные для распиливания коротких пиломатериалов.

Рис. 21.6. Узлы станков с непрерывным надвиганием
Питающие вальцы применяются при распиловке пиленых и круглых лесоматериалов. Горизонтальные вальцы используют обычно при распиловке их по ширине (см. рис. 19.3, г), а вертикальные— по толщине (см. рис. 19.3, д). В последнем случае распиливаемый материал ставят на ребро. Длина вальцов должна быть несколько больше ширины или высоты распиливаемого материала. Поддерживающие и направляющие вальцы делают обычно гладкими, а ведущие — с ребристой поверхностью (рис. 21.6, ж). При надвигании питающими вальцами для увеличения силы трения между вальцами и материалом применяют прижимные ролики в виде гладкого или рифленого колеса. Этот ролик может иметь посередине обода ребро (рис. 21.6, з), выполняющее роль расклинивающего ножа. Прижимные вальцы, как и скользящие прижимы, могут прижимать распиливаемый материал к нижней или боковой опорной поверхности.
Механизм надвигания может приводиться в движение от пильного вала или от индивидуального двигателя. В первом случае надвигание распиливаемого материала происходит только при вращении пилы, во втором двигатели механизма пиления и надвигания сблокированы, при этом остановка механизма пиления всегда вызывает и остановку механизма надвигания. Сопротивление надвиганию распиливаемого материала определяют в зависимости от типа механизма надвигания.
Для продольной распиловки лесоматериалов применяются станки непрерывного действия с горизонтальными и вертикальными приводными вальцами, а также станки с цепными транспортерами.
Станки с горизонтальными вальцами.Они применяются для распиловки пиломатериалов по ширине на несколько частей, а также для обрезки кромок необрезных досок, в последнем случае их называют обрезными (рис. 21.7, а). Такие станки имеют одну, две и более пил.
Станки с вертикальными вальцами.Эти станки служат для распиловки досок и горбылей по толщине. Наиболее распространен ребровый станок ЦР-4, он имеет одну пилу диаметром 800 мм с расклинивающим ножом и механизм надвигания, состоящий из двух пар вертикальных вальцов, поставленных перед пилой (рис. 21.7, б). Основные два вальца устанавливают на определенном расстоянии от плоскости пилы в "зависимости от необходимой толщины отпиливаемой доски. Два других вальца служат для прижима распиливаемого материала к основным вальцам. Прижим вальцов осуществляют посредством груза, подвешенного к суппорту прижимных вальцов. Для отвода вальцов применяется гидропривод, мощность которого 0,5 кВт. Наибольшая толщина распиливаемого материала 250 мм, толщина выпиливаемых досок от 8 до 125 мм.

Рис. 21.7. Схемы круглопильных станков с непрерывным надвиганием:
/ — пила; 2 — горизонтальные приводные вальцы; 3 — вертикальные приводные вальцы; 4 — прижимные вальцы; 5 — скребковый цепной транспортер; 6 — направляющая стенка (линейка); 7 — лоток
Станки с цепными транспортерами.Такие станки используют для распиловки лесоматериалов как по ширине, так и по толщине. В качестве механизма надвигания применяют скребковые цепные транспортеры. При распиловке по ширине верхняя ведущая ветвь цепи скользит в желобе, устроенном в столе станка и находится под распиливаемым материалом (см. рис. 21.6,в). В станках, распиливающих материал по толщине, ведущая ветвь транспортера движется сбоку по отношению к распиливаемому материалу в желобе, расположенном в вертикальной направляющей стенке (см. рис. 21.6, г).
20.Способы перемещения лесных грузов. Определение усилия, необходимого для перемещения груза.
С помощью подъемно-транспортного оборудования груз может перемещаться тремя способами. При первом из них груз лежит на подвижной опоре — рабочем органе (рис. 3.1, а, б) или висит под ней (рис. 3.1, в). Давление от груза на неподвижную опору при этом передается рабочим органом. И груз и рабочий орган имеют общие условия перемещения и одинаковый коэффициент сопротивления движению. В этом случае усилие, необходимое для перемещения груза, передается ему по поверхности соприкосновения груза с рабочим органом посредством силы трения (см. рис. 3.1, а). Если это условие не обеспечивается, то на рабочем органе делают выступы, через которые полностью или частично усилие передается грузу (см. рис. 3.1, б).

Рис. 3.1. Схемы перемещения груза
При втором способе перемещения (рис. 3.1, г, д) рабочий орган и груз независимо один от другого находятся на разных или на одной и той же неподвижной опоре. В этом случае рабочий орган перемещает груз перед собой, т. е. толкает его (см. рис. 3.1, г) или тянет за собой (см. рис. 3.1, д). Коэффициенты сопротивления движению для груза и рабочего органа при этом отличаются друг от друга.
Третий способ характеризуется тем, что один конец груза лежит на рабочем органе, а другой — на неподвижной опоре (рис. 3.1, е). Применение подвижных опор усложняет транспортное устройство и увеличивает его массу, но дает возможность значительно уменьшать сопротивление движению. Поэтому перемещение груза с применением подвижной опоры имеет широкое распространение.
При первом способе перемещения груз и рабочий орган имеют одинаковые по величине и направлению скорости движения, при двух других способах скорости их движения по величине и направлению могут не совпадать (рис. 3.2, а).

Рис. 3.2. Расчетные схемы
Лесные грузы имеют большую длину по сравнению с их поперечными размерами, поэтому различают продольное и поперечное перемещение. Это влияет на способ захвата груза и величину тягового усилия, необходимого для его перемещения. По величине этого усилия находят размеры рабочего и тягового органов, а также необходимую мощность двигателя подъемно-транспортной машины. . Тяговое усилие, приложенное к грузу в процессе движения, зависит от веса груза и сопротивления окружающей среды, к которой относятся воздух и поддерживающие груз опоры. Так как движение лесных грузов происходит, как правило, при небольшой скорости, то сопротивление воздуха весьма мало и при расчетах не учитывается. Сопротивление поддерживающих опор, наоборот, оказывает основное влияние на величину тягового усилия. Это сопротивление представляет собой силу трения, которая возникает между грузом (или подвижной опорой) и опорой, по которой перемещается груз.
Таким образом, величина сопротивления движению (тяговое усилие) зависит от типа опор и способов перемещения груза. Несмотря на различие в способах перемещения груза, к ним применим один общий метод определения тягового усилия, заключающийся в том, что рабочий орган, приводящий груз в движение, рассматривается как подвижная опора, а тяговое усилие, приложенное к нему, как реакция этой опоры.
Поперечное перемещение груза.Рассмотрим общий случай поперечного перемещения груза (рис. 3.2, б), когда подвижная опора (рабочий орган) посредством опорной поверхности п—п перемещает груз по неподвижной опоре а—а, расположенной под углом а к горизонту.
Движение
рабочего органа происходит по
прямой т—т под
углом ![]() .
Нормаль опорной поверхности рабочего
органа «—'/г составляет с прямойт—т угол у. В
процессе движения к грузу приложены
следующие силы: сила тяжести груза Q
= mg, где т —
масса груза, g —
ускорение свободного падения, реакции
опор в точках А и В — Nа и Nb, силы
трения в этих точках Fa
= Na
.
Нормаль опорной поверхности рабочего
органа «—'/г составляет с прямойт—т угол у. В
процессе движения к грузу приложены
следующие силы: сила тяжести груза Q
= mg, где т —
масса груза, g —
ускорение свободного падения, реакции
опор в точках А и В — Nа и Nb, силы
трения в этих точках Fa
= Na ![]() и Fb =
Nb
и Fb =
Nb ![]() , где
, где ![]() и
и ![]() —
коэффициенты трения груза по неподвижной
опореа—а и
по
—
коэффициенты трения груза по неподвижной
опореа—а и
по
опорной поверхности п—п рабочего органа. Кроме того, при неравномерном движении в соответствии с принципом Деламбера к центру тяжести груза в направлении обратном движению действует сила инерции Pi = ma, где а — ускорение движения груза.
Реакция
подвижной опоры (рабочего органа) Nb является
по существу тяговым усилием, необходимым
для перемещения груза, а реакция Na —
усилием, по которому рассчитывается
неподвижная опора а—а. При
движении груза вверх по опоре а—а сила
трения Faдействует
в точке А в
обратном направлении. При ![]() >а
(см. рис. 3.2,б) подвижная
опора п—п скользит
по грузу и поднимается по нему вверх,
причем точка касания В перемещается
по подвижной опоре вниз, а сила
трения Fb будет
направлена вверх.
>а
(см. рис. 3.2,б) подвижная
опора п—п скользит
по грузу и поднимается по нему вверх,
причем точка касания В перемещается
по подвижной опоре вниз, а сила
трения Fb будет
направлена вверх.
Из условия равновесия сил, приложенных к грузу, сумма их проекций на ось х—х, параллельную неподвижной опоре а—а, при щ>апредставлена уравнением
Nbcos[( ![]() —(
—(![]() +
+![]() )]—Fa +
Qsin
)]—Fa +
Qsin ![]() -Pi—Fbsin[
-Pi—Fbsin[ ![]() —(
—(![]() +
+![]() )]=0
)]=0
А на ось у—у уравнением
Na +
Nbsin[ ![]() -
(
-
(![]() +
+![]() )]-Qcos
)]-Qcos ![]() +
Fbcos[(
+
Fbcos[( ![]() —(
—(![]() +
+![]() )]=
0.
)]=
0.
Решая эти уравнения относительно реакций опор Na и Nb, получим
![]()
Nb = Q__________________________________________________
(1
+ ![]()
![]() ) cos [
) cos [ ![]() -
(
-
(![]() +
+![]() )]
+ (
)]
+ ( ![]() -
-![]() )
sin[
)
sin[ ![]() -
(
-
(![]() +
+![]() )]
(3.5)
)]
(3.5)
![]() (3.6)
(3.6)
Формулы (3.5) и (3.6) применимы для всех случаев поперечного перемещения лесных грузов, когда требуется определить тяговое усилие, приложенное к центру тяжести груза, или реакции его опор. В частности, они применимы для всех схем перемещения груза, показанных на рис. 3.1, с учетом условий его перемещения.
Продольное
перемещение груза.В
продольном направлении лесные грузы
перемещают волоком, в полупогружеином
(полуподвесном) положении, а также
на ходовых опорах в погруженном
положении. При перемещении груза волоком
он полностью лежит на неподвижной
опоре (рис. 3.3, а, положение
/) и тяговое усилие T
= ![]() ,необходимое
для его перемещения, в зависимости от
схемы перемещения определяется по (3.7)
или (3.15).
,необходимое
для его перемещения, в зависимости от
схемы перемещения определяется по (3.7)
или (3.15).
Если
груз перемещается в полуподвесном
положении (рис. 3.3, а, положение
//), то тяговое усилие Т, необходимое
для перемещения груза, направлено
под углом ![]() к
горизонтали и приложено в точкеВ к
концу груза имеющего длину /. Другой
конец груза Сперемещается
по неподвижной опоре а—а. Продольная
ось груза составляет с опорой угол
к
горизонтали и приложено в точкеВ к
концу груза имеющего длину /. Другой
конец груза Сперемещается
по неподвижной опоре а—а. Продольная
ось груза составляет с опорой угол ![]() В
точкахВ
и С приложены
составляющие Q
В
точкахВ
и С приложены
составляющие Q![]() и
Qc силы
тяжести груза Q.
и
Qc силы
тяжести груза Q.
При
движении по наклонной опоре а—а в
точке С вдоль
оси груза будет действовать тяговое
усилие Тс, необходимое
для преодоления сопротивления движению
составляющей силы тяжести Qc.
Для определения этого усилия Tc = ![]() ,
тогда
,
тогда
![]() (3.26)
(3.26)
|
|

Рис. 3.3. Схемы продольного перемещения груз;
Тяговое
усилие Т, необходимое
для перемещения груза, представляет
собой реакцию равнодействующей R сил ![]() иТь, приложенных
в точке В (рис.
3.3, б), причем
усилие Тb =
ТС, но
направлено в противоположную сторону.
иТь, приложенных
в точке В (рис.
3.3, б), причем
усилие Тb =
ТС, но
направлено в противоположную сторону.
По
рис. 3.3, б, ![]() =
90°- (
=
90°- ( ![]() ).
Тогда
).
Тогда
![]() (3.30)
(3.30)
Необходимо
отметить, что переход от перемещения
груза волоком (см. рис. 3.3, а) к
перемещению его в полуподвешенном
положении возможен при условии Ty ![]()
![]() или
или
![]() (3.37)
(3.37)
При продольном перемещении груза в полупогруженном положении, когда передний его конец лежит на ходовой опоре (рис. 3.3, в) усилие Тс, необходимое для перемещения части груза Qc по неподвижной опоре, определяется по (3.26).
Тяговое усилие Т, необходимое для перемещения всего груза Q, направленное вдоль его оси, составит
![]() (3.38)
(3.38)
21.Установки для раскряжевки хлыстов периодического действия с поперечным надвиганием хлыста.
Элементы и узлы раскряжевочных установок с поперечным перемещением хлыста. К раскряжевочным установкам с поперечным перемещением хлыста относятся слешеры и триммеры. Слешеры (см. рис. 4.2, тип Па) состоят из механизмов: пильного, подачи, выравнивания торца и системы управления. Триммеры с непрерывным движением хлыста (тип 116) имеют, кроме того, механизмы для введения пил в работу, а триммеры с пилением неподвижного хлыста (тип Пв) — зажимные механизмы и сбрасыватели

Рис. 4.10. Раскряжевочные установки с поперечным перемещением хлыста: а — триммер с пилением движущегося хлыста; б — то же с пилением неподвижного хлыста; в — схема рационального расположения пильных валов слешера; г — график потребной мощности слешера на пиление; д — схема к расчету мощности привода подающих цепей слешера отпиленных отрезков.
Триммеры типа Пг снабжены устройством для установочного продольного перемещения хлыста. Триммер с непрерывным движением хлыста (рис. 4.10, а) работает по следующей схеме. Хлысты с площадки 1 или буферного магазина поштучно подаются на рольганг служащий для выравнивания торцов. Крюки поперечного транспортера 3 снимают хлысты с этого рольганга и подают их к пилам 4. Пилы в исходном положении расположены ниже подающих цепей (или в некоторых конструкциях подняты над подающими цепями на величину, превышающую наибольший диаметр распиливаемого хлыста). Введение каждой из пил-в работу (подъем и опускание) производится при помощи индивидуального привода 6. Оператор, оценивая размеры и качество хлыста, находящегося на подающих цепях, выбирает программу его раскроя и вводит в действие соответствующие пилы (на некоторых конструкциях установок выбор программы автоматический). Цепи надвигают хлыст на пилы. Отпиленные отрезки падают на выносной транспортер 5, при этом межторцевых разрывов между ними не получается. У триммера с пилением неподвижного хлыста (рис. 4.10,6) хлысты выравниваются по комлю или вершине на рольганге 1У снимаются с него поперечным транспортером 2 и поступают в лоток, где зажимаются рычагами 5. Пилы 4У в соответствии с выбранной программой, поднимаются и распиливают хлыст. После возвращения пил в исходное положение сбрасыватели 3 подают отпиленные отрезки на транспортер 6. Затем цикл повторяется. Пильные механизмы. В качестве режущего инструмента на раскряжевочных установках с поперечным перемещением хлыста в основном применяют круглые пилы, хотя возможно использование и цепных пил. Основные параметры круглых и цепных пил такие же, как и на установках с продольным перемещением хлыста. У слешеров число пил должно быть равно числу пропилов при раскряжевке самого длинного хлыста (обычно от трех до восьми пил), а расстояния между пилами неизменяемые, равные длинам отпиливаемых отрезков. Число и расстановка пил в триммерах должны обеспечивать выполнение всех предусмотренных программ раскроя наиболее длинных хлыстов. В слешерах пильные валы расположены под подающими цепями и вращаются на неподвижных опорах. Они приводятся в действие от индивидуальных двигателей, или от одного общего двигателя через трансмиссию. Для большей равномерности загрузки этого двигателя или выравнивания потребления электроэнергии из сети, пилы у слешеров обычно располагают в шахматном порядке или по диагонали. Такое расположение пил снижает возможность их зажима во время пиления. Исследования работы слешеров, выполненные в СибТИ
показали, что для снижения возможности зажимов пилы слешера должны быть расположены так, чтобы последующая пила не начинала пиления, пока не закончено пиление этого же участка хлыста предыдущей пилой.
Механизмы для введения пил в работу. В триммерах, распиливающих движущийся хлыст, пилы опускаются и поднимаются обычно при помощи гидро- или пневмоцилиндров. Эти механизмы не подают пилы на хлыст, а только устанавливают их в рабочее положение, поэтому величина и характер изменения скорости перемещения пил не оказывает влияния на работу раскряжевочной установки. В триммерах, у которых распиливается неподвижный хлыст, эти устройства служат подающим механизмом и делаются такими же, как и на раскряжевочных установках с продольным перемещением хлыста.
Механизм подачи. В слешерах и триммерах, распиливающих движущийся хлыст, последний подается на пилы поперечным цепным транспортером. Число цепей на транспортере должно быть таким, чтобы каждый отпиливаемый отрезок находился не менее чем на двух цепях. Скорость движения цепей обычно постоянная и находится в пределах от 0,1 до 0,25 м/с. Целесообразно применять специальные устройства, позволяющие временно снижать скорость подачи (скорость движения цепей) при раскряжевке особенно толстых хлыстов.
Это осуществляется или оператором при помощи вариатора, включенного между двигателем и ведущим валом подающего транспортера, или автоматически при помощи специального устройства, следящего за загрузкой пильных электродвигателей и в случае перегрузки хотя бы одного из них, переключающего на меньшую скорость многоскоростной электродвигатель подающего механизма.
Цепи подающего транспортера снабжены крюками, захватывающими хлысты; они имеют подъем 10—15°, что обеспечивает лучшую фиксацию хлыстов у подающих крюков, предотвращает перекосы и самопроизвольное накатывание хлыстов па пилы. Расстояние между крюками на подающих цепях у слешеров должно в 1,5—2 раза превышать диаметр наиболее толстого хлыста, а у триммеров принимается таким, чтобы в интервале между двумя хлыстами оператор успел оценить очередной хлыст, выбрать программу его раскроя и произвести необходимое переключение пил.
Механизмы для выравнивания торца. В раскряжевочных установках типов Па, б, в (см. рис. 4.2) необходимо, чтобы в исходном положении комлевой (или в отдельных случаях вершинный) срез каждого хлыста был расположен на одинаковом расстоянии от крайней пилы. При подаче хлыстов на раскряжевочную установку со сплава комли выравнивают на воде по упорной доске. Если хлысты подаются с площадки или буферного магазина, их выравнивают на так называемом ориентирующем транспортере с постоянно выдвинутым упором, фиксирующим положение комля. На установках типа Пг таких упоров несколько и выдвижение того или другого производится оператором.
Прижимные механизмы и сбрасыватели у триммеров, распиливающих неподвижный хлыст, устроены так же, как и на раскряжевочных установках с продольным перемещением хлыста.
Система управления. У слешеров система управления включает в себя пусковую аппаратуру и блокировочные устройства. Последние допускают, например, включение подающих цепей только если вращаются все пилы, установлены ограждения, работает транспортер, уносящий отпиленные отрезки, и т. п.
У триммеров при помощи системы управления вводятся в работу пилы, заказанные оператором, а иногда и выбранные автоматически в соответствии с предусмотренной программой раскроя. У триммеров с пилением неподвижного хлыста при помощи системы управления автоматически в строго определенной последовательности срабатывают прижимы, поднимаются пилы, включаются сбрасыватели.
Конструкции раскряжевочных установок с поперечным перемещением хлыста. Наиболее отработанными триммерными раскряжевочными установками с пилением неподвижного хлыста являются раскряжевочные установки АПЛ-1 (конструкции СевНИИП) и МР-8 (конструкции ЦНИИМЭ).
Установка АПЛ-1 предназначена для раскряжевки хлыстов на сортиментное долготье (рис. 4.10,6). Хлысты, перемещаясь вдоль своей оси, поступают по приемному рольгангу 1 комлем вперед и выравниваются по вершинам, которые оказываются расположенными примерно на одинаковом расстоянии от плоскости крайней пилы, что значительно облегчает уборку отпиленных вершин. Установка имеет восемь пил, которые поднимаются и опускаются пневмоцилиндрами. Прижимные рычаги и сбрасыватели имеют также пневмопривод. Сбрасыватели срабатывают не все одновременно, а формируются в группы в соответствии с номерами пил, участвующих в раскряжевке хлыста, и сбрасывают отпиленные отрезки на выносной транспортер последовательно, начиная с комлевого, благодаря чему создаются межторцевые разрывы между соседними отрезками, необходимые для последующей сортировки. Программа раскроя задается оператором вовремя нахождения хлыста на поперечном транспортере. Расчетная производительность раскряжевочной установки АПЛ-1 составляет 35— 40 м3/ч.
Установка МР-8 также представляет собой триммер с пилением неподвижного хлыста. Она в основном выполнена по схеме, изображенной на рис. 4.10, б, но имеет цепной ориентирующий транспортер, выравнивающий хлыст по комлю; зажимы, расположенные в раскряжевочном лотке под распиливаемым хлыстом;, сбрасыватели, срабатывающие все одновременно; гидропривод подачи пил, сбрасывателей и зажимов. Установка имеет девять пил диаметром по 1,5 и 1,25 м, каждая из которых приводится во вращение отдельным двигателем мощностью 13 или 10 кВт. Расчетная производительность установки составляет 45—50 м3/ч.
К триммерным установкам, распиливающим движущийся хлыст, относится установка финской фирмы «Рау-ма — Репола» (рис. 4.11, а). Она имеет 11 пил диаметром
1,8 и 1,4 м, расположенных по диагоналям. Хлысты из буферного магазина 1 через ориентирующий транспортер 3 поступают на подающие цепи триммера 4У которые перемещаются в поперечном направлении со скоростью и = 0,3 м/с. Гарантированная поштучная подача хлыстов обеспечивается манипулятором 2, расположенным на ферме, перекрывающей стол триммера. Программа раскроя выбирается автоматически в зависимости от диаметра и длины хлыста. Пилы, которые должны участвовать в выполнении данной программы, поднима-ются только тогда, когда через зону их действия пройдет предыдущий хлыст. Это значительно усложняет систему автоматического управления, но дает возможность при диагональном расположении пил иметь сравнительно небольшое расстояние между крюками на подающих цепях триммера (3,6 м) и, следовательно, получать высокую производительность.
Для раскряжевки хлыстов довольно широко начали применяться установки слешерного типа. У пятипильного слешера JIO-65 (рис. 4.11,6) хлысты из буферного ма-газина 1 поштучно подаются на реверсивный продольный транспортер 3 и ориентируются по любой из пил слешера, после чего сбрасывателями 2 сталкиваются на цепи 4У которыми подаются на пилы 5. Диаметр пил 1,8 и 1,5 м. Скорость движения цепей слешера 0,1 и 0,2 м/с в зависимости от толщины распиливаемых хлыстов. Расстояние между крючьями на цепях 1,6 м. Каждая пила приводится во вращение от отдельного электродвигателя. Примерно такую же конструкцию имеют и слешеры, спроектированные в СибТИ. Производительность слешера составляет 70—80 м3/ч.

Рис. 4.11. Схемы: a-триммера «Раума—Репола»; б — слешера ЛО-65
На лесных складах целлюлозно-бумажных комбинатов широкое распространение получили слешеры для разделки балансового долготья на отрезки постоянной длины (1 или 1,25 м). Из воды долготье выгружается поперечным транспортером и передается на подающие цепи слешера. Производительность такого слешера составляет 80—100 м3/ч.
К установкам с поперечным перемещением распиливаемых лесоматериалов относят также концеравнители, применяемые в тарных цехах для точной прирезки пачек тарных до-щечек по длине. Наиболее распространены концеравнители с двумя круглыми пилами диаметром по 0,4 м, приводящимися во вращение отдельными электродвигателями мощностью по 3,2 кВт. Дощечки подаются на пилы либо вручную на специальной каретке (передвижном столе), либо цепным конвейером (концеравнитель Ц2К12). Станки этого типа можно применять для торцовки дощечек длиной от 0,2 до 1,2 м.
22.Классификация нижних лесопромышленных складов. График режима работы склада.
Основными признаками, характеризующими нижние лесопромышленные склады, являются: условия примыкания лесовозной дороги к транспортным путям общего пользования; грузооборот лесосклада; тип лесовозной дороги, по которой доставляется древесное сырье: уровень механизации операций: виды обрабатываемого древесного сырья, степень переработки древесины и виды выпускаемой продукции.
В зависимости от условий примыкания лесовозной дороги к транспортным путям общего пользования нижние лесосклады разделяются на три основные группы: прирельсовые, автодорожные и береговые (рис. 1.1).
Прирельсовые лесосклады примыкают к железной дороге МПС широкой колен. Лесоматериалы и готовая продукция доставляется в этом случае потребителям в вагонах.
|
| |
|
|
|
Автодорожные лесосклады примыкают к автомагистралям, по которым лесопродукция доставляется автомобильным транспортом непосредственно потребителям или первоначально транспортируется до ближайшей железнодорожной станции и перегружается в вагоны. Такие лесосклады в чистом виде представляют малочисленную группу. На практике чаше встречается смешанное примыкание. В этом случае лесоматериалы доставляются потребителям в зависимости от конкретных условий (железнодорожным транспортом и автомобилями или автомобилями и водным транспортом). Смешанное примыкание характерно для нижних лесоскладов, обеспечивающих лесоматериалами местных потребителей и имеющих значительные объемы внутреннего потребления, а также для береговых лесоскладов, примыкающих к несудоходным или временно судоходным водным путям.
Береговые лесосклады примыкают к водным путям, по которым лесоматериалы доставляются потребителям в судах, плотами или молевым сплавом.
В отличие от прирельсовых и автодорожных береговые лесосклады имеют целый ряд специфических особенностей. В зависимости от характеристики водных путей они делятся на три основные группы. К первой из них относятся склады, примыкающие к судоходным водным путям, ко второй группе отнесены склады, примыкающие к временно судоходным водным путям, а к третьей — склады, примыкающие к несудоходным водным путям. Кроме того, каждая из этих групп в зависимости от отметки высоты и продолжительности стояния паводка подразделяется на два вида: лесные склады, расположенные на водосъемных в половодье участках, и лесные склады, расположенные на участках, не затапливаемых в половодье.
Особую группу лесоскладов, примыкающих к судоходным водным путям, представляют лесоперевалочные базы и склады деревообрабатывающих предприятий, расположенных в пунктах приплава. Характерным для этих лесных складов является высокая концентрация древесного сырья в виде сортиментов. Однако в последнее время на береговых лесоскладах все более широкое распространение находит технология водной поставки хлыстов и полухлыстов. Это позволяет, с одной стороны, перенести значительную часть трудоемких операций в стационарные условия, где имеется возможность комплексно механизировать и автоматизировать лесообрабатывающие процессы, используя при этом современное высокопроизводительное оборудование, а также организовать переработку древесных отходов. С другой стороны, на береговых лесоскладах лесозаготовительных предприятий до минимума сокращается число производственных операций и максимально упрощается технология первичной обработки древесного сырья.
В числе береговых лесоскладов необходимо выделить еще одну группу. Это лесосклады, примыкающие к озерам и водохранилищам, спецификой которых являются нулевые скорости течения и значительные колебания уровня воды в водохранилищах.
Важным параметром лесных складов является их грузооборот, который характеризует фактический объем лесоматериалов, обрабатываемых на лесоскладе в единицу времени (в сутки, в месяц, в год). Обычно лесные склады характеризуются годовым грузооборотом, измеряемым в тысячах кубометров. В зависимости от величины грузооборота все лесосклады разделены на три категории: мелкие, средние и крупные.
Мелкие лесосклады имеют грузооборот до 100 тыс. м3 в год. Лесосклады с годовым грузооборотом от 100 до 300 тыс. м3 относятся к средней категории, а склады с грузооборотом 300 тыс. м3 и более являются крупными.
Среди нижних лесоскладов преобладают мелкие и средние, которые составляют около 94 % общего их количества. При этом на долю складов с малым грузооборотом приходится 49%, а на долю складов со средним грузооборотом - около 45%. Крупных нижних складов насчитывается около 100, что составляет примерно 6% общего их количества.
По типу лесовозных дорог, по которым доставляется древесное сырье, склады разделяются на автодорожные и железнодорожные. В настоящее время преобладает вывозка древесины по автомобильным дорогам, которые в свою очередь подразделяются на сезонные и круглогодового действия. Однако довольно часто, особенно в северных заболоченных районах, вывозка древесины осуществляется по узкоколейным железным дорогам (УЖД). Возможно также использование смешанных видов транспорта. Например, в летний период древесина может вывозиться по УЖД. а в зимний — автомобилями.
По видам обрабатываемого древесного сырья лесосклады разделяются на склады, принимающие деревья, хлысты и полухлысты, а также сортименты. Имеет место поступление и обработка смешанных видов древесного сырья, например хлыстов и сортиментов.
Рассматривая нижние лесопромышленные склады с точки зрения их классификации, необходимо выделить еще одну специфическую их группу. Это нижние лесосклады предприятий лесного хозяйства, функционирующие в зоне малолесных районов.
Отличительной особенностью таких лесоскладов являются их малые грузообороты. В пределах одного предприятия, имеющего небольшой объем заготовки, функционируют два-три мелких лесосклада, средний грузооборот которых не превышает 50...60 тыс. м' в год. Этот факт свидетельствует о низкой степени концентрации лесоскладского производства и является характерным практически для всех предприятий этого региона.
Таким образом, в зависимости от назначения и условий примыкания, степени механизации производственных операций, видов и объемов переработки древесины, типа лесовозных дорог и видов обрабатываемого древесного сырья существует довольно большое число типов и разновидностей лесных складов. Данная классификация охватывает практически все их многообразие. Вместе с тем в процессе развития лесозаготовительной промышленности появляются все новые черты и признаки лесоскладского производства, поэтому приведенная классификация лесных складов не может претендовать на ее завершенность.
Одним из основных показателей нижнего лесопромышленного склада является режим его работы, который характеризует сроки и объемы поступления древесного сырья и его обработки, а также сроки и объемы отгрузки готовой продукции. Режим работы склада определяется главным образом типом лесовозного транспорта, режимом работы транспорта общего пользования, а также климатическими условиями района расположения лесозаготовительного предприятия. Обычно режимы работы представляют в виде интегральных графиков поступления, обработки и отгрузки лесоматериалов.
Графики режима работы прирельсового нижнего лесосклада приведены на рис. 1.3. График 1 характеризует поступление древесного сырья (хлыстов или деревьев) на нижний склад нарастающим итогом. График II отражает характер обработки древесного сырья на лесоскладе. При этом объемы обработки по месяцам планируются равномерно. График III отражает сроки и объемы отгрузки продукции с прирельсового лесосклада.
Для определения величины запаса древесного сырья в любой момент работы склада вычисляется разность ординат графиков / и // в соответствующих точках временной оси. Разность ординат графиков // и /// в соответствующих точках временной оси дает величину запаса готовой продукции у фронта отгрузки.
Разность ординат точек А и Б соответствует годовому грузообороту лесосклада Qг.с по сырью, а разность ординат точек Б и Г характеризует объем переходящего запаса древесного сырья qс.п на начало следующего года. Разность ординат между точками О и Г определяет объем переходящего запаса готовой лесопродукции Qг.с, а разность ординат точек О и В равняется годовому объему отгрузки готовой лесопродукции Qг.с.
Величина Q31 соответствует объему вывозки за первый зимний
Месяцы года
Рис. 1.3. Интегральные графики режима работы прирельсового нижнего лесосклада
период t31, величина Qл соответствует объему вывозки древесного сырья за летние месяцы tл, а величина Q32 — объему вывозки древесного сырья за второй зимний период t3.
Величина G31 соответствует объему переработки древесного сырья за первый зимний период t31 , величина Gл — объему переработки за летний период tл, а величина G32 — объему переработки за второй зимний период t32.
Величины Eсв и Есо соответствуют максимальным объемам сезонного запаса древесного сырья, создаваемого для обеспечения ритмичной работы лесосклада соответственно во время весенней распутицы tр в и во время осенней распутицы tро.
Для нижних лесоскладов с развитой переработкой древесины и широкой номенклатурой выпускаемой продукции приведенные интегральные графики являются иллюстрацией лишь общего режима работы. При выборе системы машин и обосновании типа оборудования, а также при расчете площадей под запасы готовой продукции аналогичные графики рассчитываются и строятся для каждого вида сортиментов.
23.Краны для разгрузки хлыстов. Область и схемы применения.
Оборудование, применяемое на лесных складах для производства круглых лесоматериалов, по своему функциональному назначению разделяется на три группы: подъемно-транспортное, технологическое, вспомогательное.
Подъемно-транспортное оборудование. Подьемнотранспортное оборудование на лесных складах применяется в основном для выгрузки и создания запаса древесного сырья, а также для выполнения штабелевочно-погрузочных работ.
Для выгрузки и создания запаса древесного сырья наибольшее распространение нашли краны большой грузоподъемности, к которым относятся: кабельные краны КК-20, козловые бесконсольные краны ЛТ-62, козловые двухконсольные краны ККЛ-32 и КСК-30-42В, а также мостовые краны.
Кабельные краны КК-20 грузоподъемностью 20 т достаточно широко применяются на нижних лесопромышленных складах с малым грузооборотом. Основными их достоинствами являются: простота конструкции, надежность в работе и невысокая стоимость. Кабель-краном можно производить не только выгрузку древесного сырья с лесовозного транспорта, но и подачу его на приемные площадки или раскряжевочные эстакады, возможно также создание запаса хлыстов или деревьев объемом до 2500 м . Вместе с тем при использовании одного кабель-крана невозможно осуществить подачу сырья на спаренные и последовательно размешенные площадки. В этом случае требуется два крана. При параллельном же размещении спаренных раскряжевочных площадок существенно снижается полезный пролег крана, необходимый для создания запаса. Кроме того, максимальный объем запаса, создаваемый кабель-краном, недостаточен для складов с большим грузооборотом. Кабельные краны КК-20 выпускаются в четырех исполнениях с пролетами 70, 80, 90, 100 м и различной высотой опорных мачт.
Козловые бесконсольпые краны относятся к передвижным грузоподъемным машинам, у которых мост (ригель) установлен на двух опорах, перемещающихся по рельсовому пути. Из козловых кранов на нижних лесоскладах широко применяются специальные краны-лесоперегрузчики ЛТ-62, которые являются модернизацией крана К-305Н. Кран ЛТ-62 выпускают в двух модификациях с различными пролетами. Кран первой Модификации имеет пролет 32 м, а кран второй модификации — 40 м. Увеличенный пролет второй модификации достигается за счет дополнительной вставки длиной 8 м при сохранении той же грузоподъемности. Кран оснащен электрогидравлическим поворотным грейфером ЛТ-59 грузоподъемностью 28 т, которым можно осуществлять захват пачки хлыстов или деревьев объемом до 30 м3 и ее разворот на угол 210° со скоростью 0,06 рад/с (рис. 2.1).
Кроме специализированных Козловых кранов-лесоперегрузчиков, на выгрузке и создании запаса древесного сырья могут применяться козловые краны общего назначения К-7, К-30-32, К-182, К-202, К-405, грузоподъемностью от 20 до 30 т. Основным недостатком кранов общего назначения является то, что они рассчитаны на легкий режим работы. В этой связи их использование на нижних лесоскладах возможно при снижении грузоподъемности на одну ступень, например с 30 до 24 т или с 50 до 32 т. Вместе с тем при невысокой загрузке крана на складах с малым и средним грузооборотом возможно использование их паспортной грузоподъемности.
На рис. 2.2 приведена схема склада хлыстов на базе козлового крана типа ЛТ-62 с 40-метровым пролетом. Штабеля хлыстов укладываются в пролете крана с расположением комлей пачек в разные стороны. Высота штабеля может достигать 10 м. Козловые краны могут использоваться и на перегрузке лесоматериалов с лесовозного транспорта на транспорт общего пользования. Схема размещения штабелей и подъездных путей в пролете крана ЛТ-62 с 32-метровым пролетом при перегрузке лесоматериалов приведена на рис. 2.3. При 40-метровом пролете емкость склада увеличивается. Наиболее приемлемой конструкцией штабелей, при укладке в запас деревьев являются клеточные штабеля, которые способствуют быстрому набору пачки при работе крана с грейфером. Однако удельная емкость такого штабеля достаточно низка и составляет примерно 1,73 м3/м2. Для плотного штабеля хлыстов с уложенными вразнокомелицу пачками эта величина составляет 2,31 м3/м2.
Консольно-козловые краны относятся также к передвижным грузоподъемным машинам, у которых мост с одной или двумя консолями установлен на двух высоких опорах, перемешающихся по рельсовому пути. Из специальных консольно-козловых кранов, предназначенных для работы с лесными грузами, разработан кран ККЛ-32 (рис. 2.4), который снабжен одностоечными опорами, что позволяет перемещать пачки хлыстов с пролета на консоли. В отличие от других кранов элементы ККЛ-32 имеют коробчатое сечение и сварены из листовой стали. Конструкция крана имеет возможность самомонтажа. Кран ККЛ-32 может обеспечить выполнение всего комплекса погрузочноразгрузочных и штабелевочных работ на нижнем лесоскладе. Его оснащают грейфером Л Г-59, а также рамным грузозахватом, предназначенным для штебелевки и погрузки в вагоны пакетированных лесоматериалов. Схема склада древесного сырья на базе консольно-козлового крана ККЛ-32 приведена на рис 2.5. Особенностью работы консольно-козловых кранов является возможность размещения штабелей хлыстов или деревьев как в пролете крана, гак и под его консолями. Высота штабелей в пролете может достигать 10 м, а под консолями — не более о м на уровне максимального вылета грузозахватного устройства. Хлысты в пролете крана укладываются в плотные и клеточные штабеля, а под консолью только в плотные. В пролете и под консолями крана возможно размещение технологического оборудования.
|
| |
|
|
|
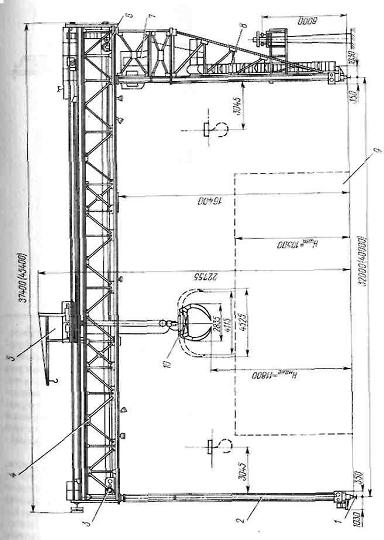
Рис. 2.1. Козловой кран ЛТ-62:
/ — рельсовый подкрановый путь; 2 — опора шарнирная. 3 — лебедка механизма перемещения грузовой гележки; ■/- мост крана; 5— кран-балка; 6—лебедка механизма подъема и опускания груза: 7 — кабина крановик: 8 — лестница; 9 — штабель хлыстов; 10 — грейфер ЯТ-59
 Рис.
2.2. Схема склада хлыстов на базе козлового
крана ЛТ-62:
Рис.
2.2. Схема склада хлыстов на базе козлового
крана ЛТ-62:
/ — водоем; 2- кран ЛТ-62; 3—штабеля хлыстов; 4 — автолесовозная дорога; 5 — вспомогательные помещения
Кроме консольно-козловых кранов специального назначения, на выгрузке хлыстов и деревьев на нижних лесоскладах могут применяться двухконсольные самомонтирующиеся крапы общего назначения серии КС и КК. Эти краны имеют значительную грузоподъемность (от 30 до 50 т). Кроме того, за счет специальных вставок они могут изменять пролет от 24 до 36 м, а некоторые краны имеют пролет 42 м. Однако все консольно-козловые краны общего назначения рассчитаны на легкий режим работы.
|
| |
|
|
|
|
|
|


Наибольшее применение на лесных складах из консольно-козловых кранов общего назначения нашел кран КСК-30-42В, грузоподъемностью 30 т и с пролетом 24, 36, 42 м. Этот кран имеет значительную высоту подъема грузового крюка, которая составляет 18 м (рис. 2.6). Отличительной особенностью конструкции мостовых кранов яется то, что их мост опирается непосредственно на ходовые колеса, при помощи которых он перемещается по надземному рельсовому пути, установленному на специальных колоннах (крановых эстакадах). Грузозахватный орган при этом подвешен на грузовой тележке, перемещающейся по передвижному мосту. Мостовые краны предназначены для обслуживания больших складских площадей. Основным их достоинством является возможность пересечения крановых путей с подъездными путями, технологическими линиями и другими лесоскладскими объектами и сооружениями. Однако необходимо отметить, что из-за высокой стоимости крановой эстакады мостовые краны оправдывают себя лишь при высокой концентрации работ на лесо-складах. В лесной промышленности для выгрузки хлыстов и деревьев с лесовозного транспорта нашли применение мостовьк краны КМ-20, КМ-30, КМ-50, грузоподъемностью соответственно 20, 30, 50 т.

24.Методы раскроя хлыстов.
Раскрой хлыстов на сортименты является одной из ключевых операций технологического процесса первичной обработки древесины, от качества выполнения которой зависят выход готовой продукции, а также количество отходов при последующей обработке круглых лесоматериалов. При этом иод раскроем хлыстов понимается процесс деления древесных стволов на части с предварительной их разметкой на отрезки, длина которых устанавливается в зависимости от размерно-качественных параметров хлыстов с учетом сортиментной программы предприятия. В зависимости от способа обработки хлыстов существует три основных способа раскроя древесных стволов: индивидуальный, программный, обезличенный. Существуют и промежуточные способы раскроя, например индивидуально-обезличенный и поставный.
Индивидуально-обезличенный — это способ, при котором наиболее ценная комлевая часть хлыста раскраивается по индивидуальной программе, а вершинная часть — по обезличенному способу.
Поставный способ, при котором предварительно рассортированные по группам хлысты раскряжевываются по неизменной программе (обезличенно) для каждой группы. Обычно такой метод применяют на слешерных установках, перестанавливая пилы под каждую группу хлыстов.
Индивидуальным способом раскроя (чаше его называют рациональным) называется такой раскрой, при котором каждый хлыст делится (раскряжевывается) на части по индивидуальной для него схеме, принятой с учетом качества хлыста и его размерных параметров, а также обеспечивающей максимальный выход наиболее пенных сортиментов по их заданной спецификации. При таком способе раскроя оценка размерных параметров и сортообразуюших пороков хлыста осуществляется визуально, а назначение длины очередного отрезка производится только после определения скрытых пороков (гни.m и др.) на торце среза ствола.
Обшие положения правил рациональной раскряжевки сводятся к следующему. Раскрой каждого в отдельности хлыста должен осуществляться с обязательным учетом видимых и вскрываемых в процессе раскряжевки пороков. Поэтому оператор предварительно оценивает хлыст визуально, а затем, наметив программу раскроя, производит отпиливание первого отрезка заданной в соответствии с принятой схемой длины. Отпиливание очередного отрезка должно производиться только после осмотра торца и видимой поверхности оставшейся части хлыста с учетом его размеров и наличия пороков.
Для обеспечения повышенного выхода и качества деловых сортиментов хлысты должны раскряжевываться индивидуально. Одновременная раскряжевка нескольких хлыстов с различными размерами и качеством не рекомендуется. Хлысты должны подаваться под пилу комлями вперед.
Хлысты с сильной сбежистостью рекомендуется раскраивать на короткие сортименты, что позволяет лучше использовать фактический объем хлыста. Вместе с тем каждый хлыст имеет сильносбежистую, среднесбежистую и малосбежистую зону. Сильный сбег (более 1 см на 1 погонный метр длины) имеет комлевая часть ствола, которую стремятся раскроить на короткомерные отрезки. Срединная часть хлыста обычно имеет малый сбег. Эту часть ствола целесообразно раскраивать на длинномерные сортименты (длиной более 5 м).
Хлысты, имеющие одностороннюю (простую) кривизну, следует размечать таким образом, чтобы место реза совпадало с местом наибольшего изгиба ствола. Если при этом кривизна сортиментов превышает допустимую, то необходима дополнительная разметка хлыста или части хлыста на более короткие отрезки.
Разносторонняя (сложная) кривизна допускается в половинном размере, от норм допуска односторонней кривизны, поэтому хлысты со сложной кривизной необходимо размечать на более короткие отрезки.
Разметку и раскряжевку хлыстов, имеющих в зоне высококачественной древесины пасынок, двойную вершину или рак. необходимо осуществлять таким образом, чтобы эти пороки были удалены из хлыста наиболее короткими отрезками и не снижали сортности лесоматериалов.
Программным способом раскроя является такой раскрой, при котором группа хлыстов, имеющая одинаковые размерные и качественные признаки, раскряжевывается по заранее установленной оптимальной для этой группы схеме. Программы (схемы) раскроя определяются по результатам индивидуальной раскряжевки партии хлыстов с последующей их группировкой по одинаковым схемам раскроя. Определение заданных для каждой программы признаков хлыстов оператором осуществляется визуально или при помощи специальных датчиков.
Обезличенным («слепым») методом раскроя называется такой раскрой, при котором все хлысты одной или разных пород с различными размерно-качественными параметрами раскряжевываются на сортименты стандартной длины по одной заранее установленной схеме.
При выборе того или иного способа раскроя древесных стволов необходимо учитывать прежде всего специфику лесосечного фонда и плановый выход выпиливаемых сортиментов. При эксплуатации древостоев с большим содержанием мягко-лиственных пород, которые подвержены поражению пороками в большей степени, чем хвойные, и при производстве широкой номенклатуры сортиментов целесообразно использовать индивидуальный способ, который учитывает особенности каждою хлыста и дает максимальный выход товарной продукции. В хвойных лесонасаждениях с незначительным содержанием лиственных пород наиболее эффективным будет программный способ. Применение обезличенного способа возможно в однородных хвойных лесонасаждениях и при ограниченном выпуске выпиливаемых видов сортиментов.
Выбор способа раскроя древесных стволов обусловливает прежде всего использование того или иного способа их обработки, который в свою очередь предполагает выбор такого типа оборудования, конструктивные особенности которого позволяют реализовать выбранный способ раскроя.
Основным требованием, предъявляемым к техническим средствам для раскряжевки хлыстов, является обеспечение высокой производительности при максимальном выходе товарной продукции. Вместе с тем достижение высокой производительности раскряжевочного агрегата при оптимальном раскрое ствола представляет собой трудную и актуальную задачу.
Главная трудность тэтой проблемы заключается в двойственном характере самого процесса раскряжевки, состоящего из двух элементов: предварительной разметки и деления ствола на части.
Высокая производительность деления ствола на части достигается при поперечном перемещении хлыста. Разметка же ствола наилучшим образом осуществляется при продольном его перемещении.
Индивидуальный способ раскроя хлыстов реализуется при использовании ручных инструментов и стационарных установок для поштучной обработки хлыстов при продольной их подаче.
Эффективность применения установок для поштучной обработки хлыстов при продольной их подаче зависит главным образом от степени учета всех параметров обрабатываемого ствола. Для достижения необходимой производительности установки оператору требуется больше времени на непосредственное управление механизмами, вместе с тем сокращается время на выбор оптимальной схемы. Таким образом, одной из основных причин, сдерживающих улучшение использования древесного сырья при его раскряжевке на установках с продольной подачей, является высокая психологическая загрузка оператора.
Программный (константный) способ раскроя хлыстов может быть реализован как на установках с продольной их подачей при обработке, так и на установках с поперечной подачей в основном триммерного типа. Однако высокая их производительность предполагает использование автоматических устройств по определению основных параметров и качества хлыста. Необходимо отметить, что до настоящего времени проблема использования таких средств в производстве практически не решена.
Обезличенный способ раскроя реализуется в основном на установках для поштучной обработки хлыстов при поперечной их подаче как слешерного, так и триммерного типа, а также на установках для пачковой обработки хлыстов. Обезличенный способ наиболее прост из названных. Именно это обстоятельство позволяет осуществить принцип поперечной подачи хлыстов при их обработке, обеспечивающий высокую производительность раскряжевочного агрегата. Однако необходимо отметить, что такие раскряжевочные установки, особенно в сочетании с круглыми дисковыми пилами, очень громоздки и практически не приспособлены для индивидуального раскроя.
На слешере осуществляется поперечное надвигание хлыстов на неподвижные пилы при их обработке. В этом случае все хлысты раскраиваются без учета особенностей каждого из них по одной и той же программе, заранее обусловленной расстановкой пил. что существенно снижает выход товарной продукции.
Повышения выхода деловой древесины при раскряжевке хлыстов на слешере можно достичь обработкой предварительно подсортированного по размерам и особенно по качеству древесного сырья. Кроме того, повысить выход деловых сортиментов можно за счет совершенствования конструкции слешера. Так, использование ориентирующего механизма для продольного перемещения хлыста, позволяющего устанавливать место комлевого реза по любой пиле, дает возможность осуществлять раскряжевку выбранной группой пил по нескольким основным программам. Такой способ раскроя получил название визуально-константного. Число программ на слешере может быть увеличено за счет предварительной откомлевки части хлыста с напенной гнилью. Эта операция может осуществляться также на ориентирующем транспортере.
Более широкие возможности заложены в раскряжевочных установках триммерного типа, на которых деление хлыста на части осуществляется выдвигающимися пилами при фиксированном его положении. При этом в раскрое хлыста могут участвовать все или только часть пил в определенной комбинации. Это дает возможность изменять программу раскроя в зависимости от индивидуальных характеристик хлыста. Вместе с тем число программ здесь также ограничено и определяется числом пил.
По обезличенному способу раскроя работают также и установки для пачковой раскряжевки хлыстов. Пачковый способ обработки древесного сырья позволяет достичь чрезвычайно высокой производительности, однако при обработке целой пачки невозможно учесть индивидуальные особенности каждого хлыста. В этой связи их раскрой осуществляется, по существу, вслепую, что резко снижает товарный выход готовой продукции и увеличивает количество отходов. Повысить выход деловых сортиментов здесь возможно путем введения в технологический процесс первичной обработки древесного сырья дополнительной операции по предварительной сортировке хлыстов.
25.Сортировка круглых лесоматериалов. Значение, дробность сортировки Оборудование.
Сортировка круглых лесоматериалов на нижних лесоскладах осуществляется в основном при помощи продольных сортировочных транспортеров. Вместе с тем все более широкое распространение находит манипуляторная сортировка.
Сортировка круглых лесоматериалов – процесс распределения лесоматериалов после раскряжевки хлыстов по качеству, породе, назначению и т. д.
Автоматизированный сортировочный лесотранспортер ЛТ-86 предназначен для сортировки круглых лесоматериалов длиной от 1,6 до 7,5 м. Выпускается в двух исполнениях с различным шагом между грузонесущими траверсами и различной скоростью перемещения тяговой цепи транспортера. Лесотранспортер ЛТ-86 первого исполнения со скоростью тяговой цепи 0,85 м/с предназначен для сортировки круглых лесоматериалов диаметром до 100 см и длиной от 1,6 до 6,5 м. Лесотранспортер ЛТ-86 второго исполнения со скоростью перемещения тягового органа 1,29 м/с предназначен для сортировки преимущественно длинномерных лесоматериалов, от 4 до 7,5 м, диаметром до 60 см. Сортировочный лесотранспортер ЛТ-86А имеет примерно такие же параметры, как и лесотранспортер ЛТ-86 в первом исполнении.
Лесотранспортер ЛТ-86 снабжен гравитационными сбрасывающими устройствами. Для управления процесса сброски лесоматериалов с лесотранспортера применяется автоматическая система управления УУС-67А.

Сортировочный продольный лесотранспортер Б-22У-1А выпускается также в двух исполнениях. У транспортера в первом исполнении скорость тягового органа составляет 0,6 м/с, а во втором исполнении—0,8 м/с. Лесотранспортер позволяет сортировать бревна диаметром до 110 см и длиной от 1,6 до 11 м в первом исполнении и от 1,6 до 6,5 м во втором исполнении. Лесотранспортер Б-22У-1А оснащается комплектом механических сбрасывателей ЛТ-166, предназначенных для механизации сброски лесоматериалов в лесонакопители. Комплект бревносбрасывателей ЛТ-166 выпускается также в двух исполнениях для правосторонней и левосторонней сброски. Вариант размещения лесонакопителей сортировочного лесотранспортера ЛТ-86 приведен на рис. 2.26.
Сортировка лесоматериалов при их круговом перемещении реализуется при помощи манипуляторов. При этом в зоне действия манипулятора размещаются приемники-накопители, по которым сортименты распределяются и соответствии с заданной схемой и дробностью сортировки (рис. 2.27). Манипулятор, укладывая бревна в лесонакопители, одновременно обеспечивает формирование транспортных пакетов, пачек или пучков заданного объема и формы поперечного сечения. Расчеты и результаты экспериментов показывают, что сортировка круглых лесоматериалов манипуляторами эффективна при числе сортировочных групп 6...8. Наиболее благоприятными условиями для применения манипуляторов на сортировке являются береговые лесосклады. Однако применение манипуляторной сортировки возможно и на прирельсовых лесоскладах, особенно при специализации потоков на выпуск ограниченного количества выпиливаемых сортиментов.
Для береговых лесоскладов с плотовым сплавом разработана технологическая линия ЛР-167 на базе манипулятора JIB-186, при помощи которой осуществляются сортировочно-сплоточные работы. Для раскладки бревен по лесонакопителям ВКНИИ-ВОЛТом разработана сортировочно-пакетирующая машина ЛР-168 на базе серийно выпускаемого электрогидравлического манипулятора JIB-186.

26.Запасы сырья полуфабрикатов, готовой продукции на нижних складах.
Древесное сырье поступает на нижние лесосклады пачками, а обрабатывается поштучно. В этой связи возникает необходимость в разделении хлыстов или деревьев и поштучной их подачи к лесообрабатывающим установкам. Кроме того, между отдельными машинами и производственными участками создаются запасы различного назначения в виде пачек бревен. В этом случае необходимо обеспечить также разделение лесоматериалов и поштучную их подачу на обработку. Для выполнения этой операции применяются специальные устройства, которые называются разделителями. Разделители по принципу своего действия делятся на две группы. К первой группе относятся устройства периодического действия, а ко второй группе -устройства непрерывного действия.
В качестве разделительных устройств периодического действия используются манипуляторы, а также разделители с челночными захватами. Манипуляторы по конструкции разделяются на фронтальные и торцовые. Фронтальные манипуляторы могут быть как одностреловые, так и двухстреловые. Торцовые манипуляторы являются одностреловыми.
Манипулятор МП-1 является стационарным одностреловым фронтального типа и предназначен для разделения пачек деревьев и поштучной их подачи в сучкорезную установку ПСЛ-2А. Грузоподъемность манипулятора на максимальном вылете стрелы 4 м составляет 3 т.
Гидроманипулятор сучкорезно-раскряжевочной линии установки ЛО-30 является стационарным одностреловым фронтального типа и предназначен для разделения пачек деревьев и поштучной их подачи на шаговый подающий лесотранспортер с одновременной укладкой комлей в сучкорезную головку. Грузоподъемность манипулятора на максимальном вылете стрелы 1,6 м составляет 1,6 т.
Гидроманипулятор ЛО-13С является стационарным двухстреловым фронтального типа и предназначен для раскряжевки хлыстов и поштучной подачи их на подающее устройство раскряжевочных установок ЛО-15А и ЛО-68. Грузоподъемность манипулятора ЛО-13С на вылете 1,6 м составляет 6 т. Максимальный вылет стрелы достигает 6,5 м.
Торцовые манипуляторы захватывают ствол в одной точке, а второй точкой ствол опирается в специальный неподвижный упор. Унифицированный гидроманипулятор МП-00 является торцовым и предназначен для разделения пачек и поштучной подачи хлыстов или деревьев на одну или две спаренные раскряжевочные или сучкорезные установки. Манипулятор имеет возможность выравнивать торцы, а также может быть использован на подсортировке хлыстов перед их раскряжевкой. Грузоподъемность манипулятора на максимальном вылете 6.2 м составляет 1,4 т.
В качестве разделителей пачек деревьев, хлыстов и бревен могут быть использованы универсальные манипуляторы типа ЛВ-184, ЛВ-185 и ЛВ-186. Их грузовой момент равен соответственно 50, 70, 110 кН м, а максимальный вылет равен у ЛВ-184 6 м. у ЛВ-185 7,3 м, у ЛВ-186 7,5 м. Эти манипуляторы могут работать как фронтальные и как торцовые.
К разделителям с челночными захватами относятся растаски-ватели пачек деревьев РД-2, растаскиватели хлыстов РХ-2 раз-грузочно-растаскиваюшие устройства ЛТ-10 и ЛТ-74.
К разделителям непрерывного действия относятся разобщители пачек хлыстов типа ЛТХ-80 и разобщители пачек бревен ЛТ-80, ЛТ-79, ЛО-108.
Разобщитель пачек гребенчатого типа ЛТХ-80 предназначен для разделения пачек хлыстов длиной до 35 м и диаметром 10... 100 см и поштучной их выдачи на обработку к установкам как с продольной, так и с поперечной подачей, а также для создания буферного запаса между сучкорезными и раскряжевочными установками. Загрузка разобщителя производится краном или лесопогрузчиком. Цикл выдачи одного хлыста составляет не более 10 с.
Разобщитель бревен гребенчатого типа ЛТ-80 предназначен для разделения пачек круглых лесоматериалов длиной 4...6,5 м и диаметром 6...60 см, а также для поштучной их выдачи на обработку. Время выдачи одного бревна составляет в среднем 3,2 с, а производительность при среднем объеме бревна 0,12 м достигает 60 м3/ч.
Питатель ЛТ-79 предназначен для поштучной поперечной подачи круглых лесоматериалов длиной от 1 до 6,5 м и диаметром от 10 до 80 см к технологическому оборудованию. Одновременно питатель может обеспечивать выравнивание торцов бревен.
Поштучная выдача лесоматериалов производится отсекателем, представляющим собой шарнирный параллелограмм, верхняя плоскость которого имеет уклон в сторону сброса бревен.
Разобщитель бревен гребенчатого типа ЛО-108 позволяет осуществлять разделение пачек и поштучную выдачу бревен длиной от 1,6 до 8,5 м и диаметром от 6 до 100 см. Разобщитель бревен ЛО-108 имеет два транспортера с реверсивными приводами. Транспортеры имеют толкатели. Основной лесотранспортер перемещается в сторону выдачи бревен со скоростью 0,42 м/с, а нспомогательный движется навстречу основному со скоростью 0,32 м/с. Таким образом, у ЛО-108 нет неподвижных гребенок. Вместимость его бункера составляет 10 м3, а производительность достигает 110 м3/ч. Достоинством этого разобщителя является также возможность работы с лесоматериалами, имеющими пороки формы ствола (закомелистость, кривизну).
Все многообразие технологического и подъемно-транспортного оборудования, применяемого для производства круглых лесоматериалов, по характеру работы можно разделить на две основные группы. К первой группе относятся станки, машины и установки периодического действия, а ко второй группе — станки, машины и установки непрерывного действия.
Лесообрабатывающие машины периодического действия имеют цикличный (повторяющийся) характер работы. При этом полный цикл работы такой машины состоит из отдельных элементов, выполняемых в строго определенной последовательности.
Для машин непрерывного действия характерным является возможность обработки или перемещения предметов труда сплошным потоком или с определенными интервалами между ними.
Выбор того или иного типа оборудования для выполнения отдельных операций определяется главным образом его назначением, областью эффективного использования и производительностью с учетом параметров обрабатываемого сырья и требований, предъявляемых к качеству готовой продукции.
27.Штабелевка и погрузка круглых лесоматериалов. Оборудование, технологические схемы применения.
Технология штабелевочно-погрузочных работ, состав и назначение подъемно-транспортного оборудования на прирельсовых и береговых лесоскладах неодинаковы. Определяется это прежде всего различием условий поставки лесопродукции потребителям. С прирельсовых лесоскладов продукция отгружается в вагоны МПС, а с береговых лесоскладов лесоматериалы поставляются сплавом или в судах.
Для штабелевки и погрузки лесоматериалов на прирельсовых лесоскладах применяют консольно-козловые и башенные краны, а также автопогрузчики. В некоторых случаях находят применение автомобильные и пневмоколесные краны или к раны-экскаваторы.
Консольно-козловые краны и башенные краны обладают высокой производительностью, обеспечивают максимальнее использование складских площадей, способны выполнять погрузку лесоматериалов как в пакетах, так и россыпью. Для механизации штабелевочно погрузочных работ краны могут оснащаться грейферными захватными устройствами, при помощи которых можно штабелевать и грузить не только круглые лесоматериалы, но и пилопродукцию, технологическую щепу, горбыли и др.
Консольно-козловые краны ККУ-7,5; ККУ-10; ККС-10 имеют одинаковую конструкцию, позволяющую за счет опор трапециевидной формы с просветом между ними на максимальной высоте Перемешать пачку лесоматериалов длиной до 8 м с одной консоли на другую без ее разворота. Их грузоподъемность равна соответственно 7,5; 10 т. Краны поставляются с пролетом 32 м, а ККУ-7,5 может поставляться с пролетом 20 и 32 м. Они имеют разновеликие консоли длиной 8 и 9 м. Высота подъема грузового крюка составляет 1(1 м.
Консольно-козловые краны ККЛ-8; ККЛ-12,5; ККЛ-16 предназначены также для штабелевки и погрузки лесоматериалов на нижних лесоскладах. Отличаются от кранов типа ККУ и ККС по конструкции тем, что имеют четыре трубчатые опоры, установленные на ходовых тележках. К верхней части трубчатых опор крепится пролетное строение (мост), которое представляет собой сплошную конструкцию со сварной трубой в центре и двумя балками двутаврового сечения. На двутавры уложены рельсы для перемещения грузовой тележки.
Кран ККЛ-16, грузоподъемностью 16 т с пролетом 32 м и консолями по 10 м предназначен в основном для механизации погрузочно-разгрузочных работ с пакетированными лесоматериалами. Оснащен универсальным торцовым захватом типа ЛТ-77, предназначенным для работы как с пакетами лесоматериалов длиной 1,5...6,5 м, так и с лесоматериалами без обвязок, россыпью. Захват имеет возможность поворачиваться на 350°.
Башенные краны-лесопогрузчики КБ-572А грузоподъемностью 10 т предназначены для выполнения погрузочно-штабелевочных работ на лесных складах. Стрела крана - многосекционная, полноповоротная, состоит из трех секций при вылете 30 м и четырех секций при вылете 35 м. Грузоподъемность крана при вылете 35 м снижается с 10 т до 6,5 т. Конструкция портала крана с колеей и базой 6 м позволяет размещать между крановыми путями подъездной железнодорожный тупик и пропускать под ним вагоны МПС. Грузовой крюк может подниматься на высоту до 13.5 м со скоростью 20...40 м/мин, а грузовая тележка может передвигаться по стреле со скоростью 24 м/мин. Скорость перемещения крана но рельсам составляет 30 м/мин. Башенные краны но сравнению с консольно-козловыми имеют удвоенную рабочую зону, так как могут обслуживать площади с обеих сторон крановых путей. За счет этого сокращается фронт штабелевки лесоматериалов и улучшается использование складских площадей. Кроме того, улучшаются возможности планировки производственных участков и привязки лесообрабатывающих цехов к основным технологическим линиям. Башенные краны могут обслуживать два и даже три железнодорожных тупика при многопоточной компоновке нижнего лесосклада.
Консольно-козловые и башенные краны могут быть оснащены стройными и грейферными грузозахватными устройствами. Наибольшее применение нашли грейферы ВМГ-5А, ЛТ-153 и ГТБ-1М. Для погрузки пакетированных лесоматериалов применяют специальные захватные устройства рамного типа ЛВ-88, а для пакетированных пиломатериалов — автоматические захваты ЗП-2 и ЗП-3.
Вибрационный моторный грейфер ВМГ-5А, грузоподъемностью 5 т, предназначен для оснащения кранов грузоподъемностью до 7 т, используемых на штабелевке и погрузке лесоматериалов. Смыкание и размыкание челюстей у этого грейфера осуществляется электроталями через шестикратный полиспаст. Грейфер оснащен механизмом вибрации.
Электрогидравлический поворотный грейфер ЛТ-153 является съемным грузозахватным органом для кранов ККС-10 и КБ-572. Его грузоподъемность составляет 8 т. Объем захватываемой пачки бревен длиной 6,5 м может достигать 8,5 м3. Грейфер может поворачиваться на угол 240°. Время набора пачки составляет в среднем 24...25 с.
Торцовый грейфер ГТБ-1М предназначен для кранов грузоподъемностью до 10 т. Грейфер захватывает пачки бревен с торцов двумя плоскими вертикально расположенными челюстями, которые имеют возможность перемешаться в горизонтальной плоскости по раме захвата. Для кранов грузоподъемностью до 12,5 т разработан торцовый грейфер типа ЛТ-77, который рассчитан для работы с лесоматериалами длиной от 1,5 до 6,5 м.
Применение торцовых грейферов ограничено в связи с тем, что существуют жесткие требования к разнице сортиментов по длине. Они имеют большую собственную массу, снижающую полезную грузоподъемность кранов на 15...20%.
Автопогрузчики являются самоходными машинами, обеспечивающими выполнение погрузочно-разгрузочных и штабелевочных работ, а также перемещение и транспортировку грузов в пределах склада. Применение автопогрузчиков позволяет осуществить свободную планировку объектов нижнего лесосклада и автономное функционирование производственных участков. Они могут доставлять материалы в любую точку лесосклада на высокой скорости. Обладая небольшим радиусом разворота, являются достаточно маневренными машинами. Вместе с тем применение автопогрузчиков обусловливает размещение лесосклада на площадках с высокой несущей способностью грунтов или с твердым покрытием. Кроме того, из-за небольшой высоты формирования штабелей, а также наличия дорог для проезда автопогрузчиков их применение требует значительных площадей.
См. стр. 70-75 учебника «Технология и проектирование лесных складов».
28.Круглые лесоматериалы. Основные сортименты, стандартные требования к ним.
Лесоматериалы - это материалы из древесины, сохранившие ее природную физическую структуру и химический состав, получаемые из хлыстов или их частей путем поперечного или продольного деления.
Круглые лесоматериалы это материалы из древесины, получаемые путем поперечного деления хлыста.
Сортиментами называются материалы установленного назначения. Круглые лесоматериалы могут поставляться в виде бревен, кряжей и чураков.
Сортимент, предназначенный для использования в круглом виде или в качестве сырья для выработки продукции общего назначения, называется бревном.
Кряж - это круглый сортимент, предназначенный для выработки специальных видов лесопродукции.
Чураком называется круглый сортимент, длина которого соответствует размерам, необходимым для обработки на станках.
Долготьем называются отрезки хлыста, имеющие длину кратную длине получаемого сортимента с припуском на разделку.
Долготье, предназначенное для разделки на сортименты разного назначения, называется комбинированным.
Требования к круглым лесоматериалам определяются главным образом их назначением и условиями использования. При этом большинство свойств лесоматериалов зависит от их породы. Порода является комплексным показателем качества лесопродукции. Основные требования к массовым видам лесоматериалов устанавливаются отдельно для хвойных и лиственных пород.
Круглые лесоматериалы хвойных и лиственных пород в соответствии с ГОСТ 9463-88 и ГОСТ 9462-88 по своему назначению разделяются на четыре основные группы.
К первой группе относятся лесоматериалы для распиловки и строгания, в которую входят бревна и кряжи для выработки пиломатериалов, шпал и переводных брусьев для железных дорог как широкой, так и узкой колеи, а также лесоматериалы для выработки строганого шпона.
Вторая группа включает в себя лесоматериалы, предназначенные для лущения. В эту группу входят кряжи для выработки лущеного шпона, а также для производства спичек.
Третью группу составляют лесоматериалы для выработки целлюлозы различного назначения и белой древесной массы (балансы).
В четвертую группу включены лесоматериалы, предназначенные для использования в круглом виде. К ним относятся лесоматериалы для изготовления мачт судов и радио (мачтовые бревна), свай гидротехнических сооружений и элементов мостов (гидростроительные бревна), опор линий связи и электропередачи (столбы), для вспомогательных и временных построек (подтоварник), а также для строительства (строительные бревна). В эту же группу входят лесоматериалы для изготовления рудничной стойки, предназначенной для крепления горных выработок. Рудничная стойка, изготовленная на экспорт, называется пропсом. Кроме того, к лесоматериалам, используемым в круглом виде, относятся и тонкомерные лесоматериалы жерди, колья и шпалеры хмельников.
По толщине все круглые лесоматериалы разбиты на три группы: мелкие, средние и крупные. К мелким относятся сортименты с диаметром в верхнем отрезе без коры от 6 до 13 см включительно при измерении с градацией 1 см. Средние сортименты имеют толщину в верхнем отрезе без коры от 14 до 24 см включительно, а крупные — 26 см и более с градацией для обеих групп 2 см.
По длине круглые сортименты подразделяются также на три группы: короткомерные, средней длины и длинномерные. К ко-роткомерным относятся сортименты длиной до 2 м включительно. Сортименты средней длины имеют длину от 2 м до 6,5 м, а длинномерные — более 6,5 м.
Размеры лесоматериалов по длине устанавливаются с определенными градациями. Величина той или иной градации обусловливается степенью дефицитности лесоматериалов конкретных пород. Необходимо отметить, что градации существенным образом влияют на точность учета.лесоматериалов.
В процессе производства лесоматериалов неизбежны некоторые отклонения от номинальных размеров их длины и поперечного сечения. Если отклонение должно быть в сторону увеличения номинального размера, то оно называется припуском. Когда отклонения размеров лесоматериалов допускаются как в сторону увеличения, так и в сторону уменьшения, то они называются предельными отклонениями, а сумма их абсолютных значений называется допуском.
Одним из определяющих требований, предъявляемых к круглым лесоматериалам, является ограничение пороков. В зависимости от вида, размера, количества и места расположения пороки оказывают различное влияние на свойства древесины. Степень ограничения пороков находится в прямой зависимости от степени их влияния на основное назначение лесопродукции. Один и тот же порок может оказывать значительное влияние на качество одного сортимента и не иметь существенного влияния на качество другого
Диапазон влияния пороков на основные свойства сортиментов достаточно широк. В этой связи для одного и того же вида лесоматериалов устанавливается несколько степеней влияния пороков на их качество. Каждая из этих степеней определяет сорт лесоматериалов. Определение степени влияния пороков на основные свойства сортиментов, а также знание номенклатуры и встречаемости пороков создают основу для нормирования качества круглых лесоматериалов. Существующая практика оценки качества круглых лесоматериалов свидетельствует о том, что их сортность определяется по ограниченному количеству важнейших пороков. Наибольшую встречаемость из них имеют сучки, трещины, гнили и кривизна. Основными же сортообразующими пороками являются сучки и гнили. Требования к качеству лесоматериалов определяются унифицированными стандартами ГОСТ 9463-88 и ГОСТ 9462-88. В соответствии с этими требованиями все круглые лесоматериалы по качеству разделяются на три сорта.
Существенное влияние на механические свойства и на стойкость против загнивания древесины оказывает ее влажность. Поэтому для ряда лесоматериалов их влажность ограничивается определенной величиной. При обработке влажной древесины продукция, получаемая из нее, должна иметь припуски на усушку.
Методы оценки качества круглых лесоматериалов регламентируются ГОСТ 2292—88, который предусматривает два основных способа: выборочную оценку лесоматериалов, измеряемых поштучно, и выборочную проверку лесоматериалов, измеряемых в складочной мере. По согласованию поставщика с потребителем или по требованию последнего может осуществляться и сплошной контроль лесоматериалов.
Круглые лесоматериалы подвергаются обязательному учету, заключающемуся в определении их объема в плотной мере. Для определения объема лесоматериалов необходимо осуществить их обмер. ГОСТ 2292—88 предусматривает два основных способа учета. Первый способ заключается в поштучном обмере лесоматериалов с последующим вычислением объема каждого из них в плотной мере. Суть второго способа заключается в том, что лесоматериалы первоначально измеряются в складочной мере с последующим переводом в плотную меру через соответствующие коэффициенты полнодревесности.
Хвойные лесоматериалы, предназначенные для выработки пиломатериалов на экспорт, должны рассортировываться по породам следующим образом: ель и пихта вместе, сосна, кедр, лиственница отдельно.
Балансы, кроме предназначенных для производства хвойной и лиственной сульфатной целлюлозы и бисульфитной полуцеллюлозы, лиственной нейтрально-сульфитной полуцеллюлозы, должны быть также рассортированы по породам: еловые и пихтовые вместе, ольховые и осиновые, включая тополь, вместе, сосновые, лиственничные и березовые отдельно, твердолиственные породы вместе.
При молевом лесосплаве лесоматериалы по породам не рассортировываются. При поставке лиственных и лиственничных лесоматериалов в плотах или в судах, а также при погрузке в суда из плотов допускается приплот хвойных лесоматериалов в соответствии с действующими нормами.
Рудничную стойку для каменноугольной и горнорудной промышленности рассортировывают и укладывают в штабеля по длинам и толщинам. В одном штабеле должны укладываться стойки одной длины и одной-двух смежных четных и нечетных до 11 см включительно толщин. Рудничная стойка кратных размеров при перевозке железнодорожным и автомобильным транспортом подлежит рассортировке отдельно по каждой длине, а при поставке в судах и плотах — по группам длин: от 4 до 4,5 м; от 5 до 5,5 м; от 6 до 6,5 м. Сортировка их по толщинам производится на три группы: от 7 до 11 см: от 12 до 16 см; от 18 до 22 см (от 18 до 24 см для горнорудной промышленности).
Транспортируют круглые лесоматериалы железнодорожным, автомобильным и водным транспортом в соответствии с правилами перевозки грузов, действующими на данном виде транспорта и на лесосплаве. Лесоматериалы могут транспортироваться в пакетах или в непакетированном виде. Для пакетирования лесоматериалов используют многооборотные стропы (ГОСТ 14110—80). Размеры пакетов устанавливаются ГОСТ 16369—88.
На транспортные средства лесоматериалы укладывают штабелями, которые формируют из отдельных бревен или пакетов. При перевозке железнодорожным и автомобильным транспортом в штабеля укладывают лесоматериалы одной длины. При транспортировании в судах и плотах в штабель или сплоточную единицу укладывают лесоматериалы одной или двух смежных длин.
При перевозке в вагонах рудничные стойки должны быть уложены одной или двух смежных четных толщин или двух смежных нечетных толщин до 11 см включительно для каждой длины. При этом стойки каждой длины должны быть уложены отдельно.
Балансы, изготовленные из вершинной части хлыста, укладывают в отдельный пакет (пучок) или в формируемый на транспортном средстве штабель с разницей между наименьшей и наибольшей длиной не более 0,5 м.
Правила маркировки и обмера круглых лесоматериалов регламентируются ГОСТ 2292—88. В соответствии с требованиями этого стандарта круглые лесоматериалы диаметром 14 см и более маркируются поштучно в пунктах их производства. Круглые лесоматериалы длиной менее 2 м независимо от их диаметра поштучно не маркируются, за исключением лесоматериалов, предназначенных для лущения и строгания, выработки авиационных пиломатериалов, лыжных и ложевых заготовок, а также лесоматериалов ценных пород. Балансы, рудничная стойка и дрова поштучно также не маркируются.
Маркировка круглых лесоматериалов должна содержать обозначение их сорта и толщины. Если нормативно-техническая документация устанавливает один сорт лесоматериалов, то маркировка должна содержать только обозначение толщины. На лесоматериалах, предназначенных для лущения, при поставке их в долготье или в комбинированном виде по длине наносят обозначение сорта каждого чурака и толщины бревна. На вершинных бревнах должно быть нанесено обозначение в виде черты, пересекающей весь верхний тореи бревна.
Реквизиты маркировки наносят на верхние торцы лесоматериалов водостойкими красками и мелками стойкими к атмосферным воздействиям.
Сорт лесоматериала обозначается арабскими или римскими цифрами: 1 или I — первый сорт; 2 и II - второй сорт; 3 и Ш - третий сорт.
Толщина лесоматериалов обозначается арабскими цифрами в сантиметрах: 0 — 20, 30, 40, 50 и т. д.; 2— 12, 22, 32, 42. 52 и т. д.; 4 — 14, 24, 34, 44, 54 и т. д.; 6 — 16, 26, 36, 46, 56 и т. д.; 8—18, 28, 38, 48, 58 и т. д.
Условные обозначения сорта и толщины должны иметь высоту 30...50 мм. К пакетам или сплоточным единицам прикрепляются ярлыки, которые должны содержать следующие реквизиты: номер пакета (пучка), назначение лесоматериалов, количество бревен и их общий объем. Номер пакета (пучка) должен дублироваться нанесением обозначения на нескольких бревнах или на втором ярлыке. Реквизиты наносятся несмываемой краской или другими средствами, обеспечивающими сохранность обозначений до получения лесоматериалов потребителем.
При групповом способе определения объема лесоматериалов, количество бревен, не подлежащих поштучному измерению, не указывается.
29.Системы машин для нижних лесопромышленных складов. Основное оборудование. Обоснование применения систем машин.
Процесс любого производства включает в себя ряд операций, выполняемых в технологической последовательности при помощи определенного набора оборудования, представляющего собой систему машин. При этом под системой машин следует понимать совокупность технических средств различного функционального назначения, взаимно увязанных по своим эксплуатационным параметрам в комплекты, предназначенные для осуществления какого-либо процесса или выполнения определенного цикла операций.
Система машин как единое целое, состоящее из ряда элементов, связанных друг с другом но определенному принципу, характеризуется целевым назначением (выполнением конкретных задач), иерархической (многоуровневой) структурой, состоящей из подсистем более низкого уровня, возможностью управления (целенаправленного воздействия на систему), а также процессом функционирования, заключающимся в обмене между элементами системы различными материальными средствами или какой-либо информацией.
Для комплексной механизации и автоматизации лесозаготовительного производства разработана система машин, которая характеризуется определенной номенклатурой технических средств, взаимоувязанных друг с другом по типам и количеству с учетом особенностей природно-производственных условий основных лесозаготовительных районов страны. Система машин для лесозаготовок имеет трехуровневую структуру, состоящую из взаимодействующих подсистем, соответствую тих определенным фазам лесозаготовительного производства, и обозначается индексом ЛП. Каждая подсистема, кроме буквенного индекса, обозначающего принадлежность к данной системе, имеет соответствующий числовой код, который включает в себя набор чисел, обозначающих фазу производства (первое число), вид работ или соответствующий технологический процесс (второе число), а также тип оборудования, на котором базируется данная подсистема (третье число) [71].
Совокупность технических средств, предназначенных для первичной обработки древесного сырья, представляет собой систему машин для лесных складов. Эта система соответствует третьей фазе лесозаготовительного производства и поэтому обозначается кодом ЛП.З.
В свою очередь система машин ЛП.З в зависимости от структуры технологического процесса, которая определяется видом поступающего древесного сырья, разделяется на пять основных подсистем. Первая подсистема соответствует наиболее полной структуре технологического процесса нижнего лесосклада, предназначена для первичной обработки деревьев и обозначается кодом ЛП.З. 1. Вторая подсистема предназначена для первичной обработки хлыстов и обозначается кодом ЛП.З.2. Третья подсистема предназначена для выработки короткомерпых сортиментов (рудничной стойки, пропсов, балансов) и обозначается кодом Л П.3.3. Четвертая подсистема предназначена для производства технологической щепы на лесных складах и обозначается кодом ЛП.З.4. Пятая подсистема является вспомогательной. Она предназначена для технического обслуживания и ремонта лесоскладских машин, обозначается кодом ЛП.3.5 (в данном пособии не рассматривается).
Каждая из этих подсистем может базироваться на специализированных (однооперационных) или на многооперационных машинах. Однако в любой из систем возможно применение тех и других машин одновременно. Тип применяемого в системе оборудования характеризуется третьим числом кода. Например, с 1 по 40 обозначены системы, сформированные только из однооперационных машин, с 41 по 60 — системы на базе многооперационных машин, а с 61 по 99 — системы, где применяются как однооперационные, так и многооперационные (смешанные) машины.
Таким образом, полный код системы машин для лесных складов состоит из буквенного индекса ЛП и трех чисел, отделяемых друг от друга точкой. Например, кодом ЛП.З.2.01 обозначена система для первичной обработки хлыстов на нижнем лесоскладе однооперационными машинами, а кодом Л П.3.1.63 обозначена система для первичной обработки деревьев на нижнем лесоскладе, включающая как одно-, так и многооперационные машины.
Для комплексной механизации лесозаготовительного производства на ближайшую перспективу укомплектовано 76 основных систем машин, в том числе 18 систем предназначены для нижних лесоскладов. При формировании систем в их состав включены как серийно выпускаемые, так и перспективные машины, находящиеся в стадии НИР и ОКР. При этом соблюдались следующие основные принципы:
использование однотипных машин на одноименных операциях;
обеспечение соответствия технических и эксплуатационных параметров машин особенностям природно-производственных условий, виду заготавливаемого древесного сырья (деревья, хлысты или сортименты), а также возможностям комплексного и рационального его использования;
обеспечение равной или кратной производительности машин в системе с учетом примерного равенства их технической надежности.
Ниже будут рассмотрены системы машин для обработки деревьев и хлыстов.
Системы машин для обработки деревьев. Система машин ЛП.З. 1.01 предназначена для первичной обработки деревьев на лесных складах, примыкающих к железной или автомобильной дорогам, а также к судоходной реке. Она может быть применена и на лесных складах потребителей. Систему машин ЛП.З. 1.01 целесообразно использовать в районах со смешанными лесонасаждениями для обработки мелких и средних деревьев.
В состав этой системы включено оборудование для выгрузки пачек деревьев, обрезки сучьев, раскряжевки хлыстов, сортировки и пакетирования круглых лесоматериалов, штабелевки и погрузки сортиментов, дробления сучьев, а также оборудование Для уборки и вывозки отходов.
На выгрузке, создании запаса и подаче пачек деревьев на обработку могут быть использованы краны ККЛ-32, ЛТ-62 и ЛТ-62А, оснащенные электрогидравлическим поворотным грейфером ЛТ-185, а также разгрузочно-растаскивающие устройства ЛТ-10 или ЛТ-74. Для обрезки сучьев в эту систему включена сучкорезная машина СМ-11, которая в ближайшем будущем заменит установку ПСЛ-2А.
На раскряжевке хлыстов используются полуавтоматические линии ЛО-15С или ЛО-15А. При этом в качестве питателя раскряжевочных установок может быть применен бункерный разобщитель хлыстов типа ЛТХ-80.
Для сортировки круглых лесоматериалов в эту систему включены продольные автоматизированные лесотранспортеры с односторонней сброской ЛТ-86 или ЛТ-86А, а также лесотранспортеры с автоматизированной двухсторонней сброской ЛТ-182. Для учета лесоматериалов предполагается использование устройства ТС-43.
Пакетирование круглых лесоматериалов в лесонакопителях сортировочного лесотранспортера может осуществляться с помощью специальной пакетоформирующей машины ЛТ-177.
На штабелевке и погрузке сортиментов могут быть использованы консольно-козловые краны ККЛ-16 и ККС-10 или башенные краны КБ-572. При этом кран ККЛ-16 грузоподъемностью 16 т оснащен грейфером ПЛ-28, а краны ККС-10 и КБ-572 - грейфером ЛТ-153 (ВМГ-5А).
Дробление сучьев осуществляется рубительными машинами ДУ-2 или МРГС-7. Для уборки отходов применяются специальный транспортер ТОЦ-16-5 и скиповый погрузчик Л В-175, а для вывозки отходов могут применяться автосамосвалы ЗИЛ-ММЗ-555 или специальные мусороуборочные машины ПЛ-16А.
В состав системы машин ЛПЗ.1.61 и Л П.3.1.62 в отличие от системы машин ЛП.3.1.01 включена сучкорезно-раскряжевочная установка ЛО-30, что позволяет использовать ее в районах со смешанными лесонасаждениями для обработки не только мелких и средних, но и крупных (диаметром более 60 см) деревьев. Состав оборудования на других операциях, условия примыкания, а также основные показатели системы машин Л 11.3.1.61 аналогичны системе ЛП.3.1.01.
Система машин ЛП3.1.04 предназначена для первичной обработки деревьев в основном на прирельсовых нижних лесных складах. В состав этой системы включена шнековая установка для групповой очистки стволов от сучьев СМ-18 и раскряжевочно-сортировочная установка (Л П.0645), В этой связи систему машин ЛП.3.1.04 целесообразно использовать в хвойных лесонасаждениях для обработки в основном мелких деревьев. Обслуживает эту систему 18...22 рабочих, а ее расчетная сменная производительность в зависимости от величины среднего объема хлыста составляет от 250 до 370 м3.
Система машин ЛП.3.1.02 является перспективной и предназначена для обработки средних и крупных деревьев хвойных пород на лесных складах, примыкающих к железной дороге МПС или непосредственно к потребителю. Состав оборудования и основные показатели по этой системе приведены в табл. 2.2.
Системы машин для обработки хлыстов. Доля вывозки хлыстов на нижние лесопромышленные склады составляют около 94% общего объема вывозки, поэтому технологический процесс заготовки, вывозки и первичной обработки хлыстов ТП-2 в настоящее время и на ближайшую перспективу следует считать основным.
Для первичной обработки хлыстов на лесных складах разработано 11 систем машин. К ним относятся: ЛП.3.2.01; ЛП.3.2.02; ЛП.3.2.03; ЛП.3.2.04; ЛП.3.2.05; ЛП.3.2.06; ЛП.3.2.07; ЛП.3.2.08; ЛП.3.2.61; ЛП.3.2.62; ЛП.3.2.63. Состав оборудования и основные показатели но этим системам приведены в табл. 2.3.
Система машин ЛП.3.2.01 предназначена для обработки мелких, средних и крупных хлыстов смешанного породного состава на нижних лесоскладах, примыкающих к железной дороге МПС, судоходной реке, автомобильной дороге общего назначения, или непосредственно к потребителю. Отличительной особенностью этой системы является то, что в ее состав входит электромоторная пила ЭПЧ-3 (ЭПЧ-ЗМ) для раскряжевки хлыстов, а на сортировке круглых лесоматериалов используется унифицированный лесотрансиортер Б-22У-1А с комплектом бревно-сбрасывателей ЛТ-166. Производительность этой системы составляет в среднем 150... 180 м3 в смену.
Система машин ЛП.3.2.02 предназначена для обработки мелких и средних хлыстов смешанного породного состава. В этой системе для раскряжевки хлыстов предназначена полуавтоматическая линия ЛО-15С (ЛО-15А) или установка гидрофицированная ЛОЛ 13, в комплекте с электромоторной пилой ЭП-50К. На сортировке круглых лесоматериалов предусмотрено применение автоматизированного сортировочного лесотранспортера ЛТ-86А с односторонней сброской или лесотранспортера ЛТ-182 с двусторонней сброской. Обслуживает эту систему 30...31 рабочий. Производительность системы составляет в среднем 250...360 м3 в смену.
Система машин ЛП.3.2.03 предназначена для обработки в основном крупных хлыстов смешанного породного состава, так как здесь используется раскряжевочная установка ЛО-68 с двухдисковым пильным аппаратом. В этой системе предусмотрено также использование мостового крана KM-30 с электрогидравлическим грейфером ЛТ-185 для выгрузки пачек хлькстов и подачи их на обработку. Система может использоваться на нижних лесоскладах, примыкающих как к железной дороге МПС, так и к судоходной реке или к потребителю. На обслуживании этой системы занято 35…38 рабочих, а ее производительность составляет в среднем 450...500 м3 в смену.
Система машин ЛП.3.2.04 предназначена для обработки средних и крупных хлыстов в основном хвойных пород, так как базируется на раскряжевочной автоматизированной многопильной установке ЛО-105 слешерного типа. Может использоваться на прирельсовых нижних лесоскладах или на складах примыкающих непосредственно к потребителю. На обслуживании этой системы занято около 32 рабочих, сменная производительность достигает 600...650 м3.
В систему машин ЛП.3.2.05 включена раскряжевочно-сортировочная установка (ЛП-0645), поэтому она может быть использована для обработки хвойного древесного сырья, со значительным содержанием тонкомерных хлыстов на прирельсовых нижних лесоскладах или на лесоскладах, примыкающих к автомобильной дороге общего назначения или к потребителю Производительность системы может колебаться в зависимости от величины среднего объема хлыста от 250 до 370 м в смену. На ее обслуживании занято 15...20 рабочих.
Система машин Л П.3.2.03 является также перспективной. В се состав может быть включена двухножевая установка для раскряжевки крупных хлыстов смешанных пород (код ЛП.0650). Эта система предназначена для прирельсовых лесоскладов, а также для складов, примыкающих к потребителю или судоходной реке.
30.Оборудование и технология нижних лесных складов при поступлении на них сортиментов.
Для нижних лесоскладов характерно поточное производство. Машины и установки, выполняющие отдельные технологические и транспортно-переместительные операции, объединяются определенным образом в технологические потоки. Размещение машин и установок на площадке склада – последовательное, в порядке выполнения технологических и транспортно-переместительных операций.
Технологический процесс на нижних лесопромышленных складах должен отвечать следующим основным требованиям:
- он должен соответствовать основным природно-производственным условиям работы склада. Все технологическое, транспортно-перемести- тельное и другое оборудование, применяемое на каждом конкретном нижнем складе, должно выбираться с учетом годового грузооборота склада, видов вывозимого сырья из лесосеки, среднего объема хлыста, породного состава, типа транспортных путей, к которым примыкает лесопромышленный склад, видов лесопродукции, отгружаемой со склада, и ряда других условий;
- размеры площадки нижнего лесопромышленного склада должны быть такими, чтобы обеспечить размещение всего оборудования, лесоперерабатывающих цехов, штабелей запасов сырья, полуфабрикатов и готовой продукции, производственных зданий и сооружений, транспортных путей, необходимых противопожарных разрывов и водоемов. Общая площадь нижнего склада рассчитывается, как и другие основные параметры лесного склада, исходя из его грузооборота, сроков и объемов поступления леса на склад, его обработки, выхода товарной продукции;
- оборудование отдельных участков на площадке нижнего лесопромышленного склада нужно располагать по ходу технологического процесса так, чтобы обеспечить наименьшее перемещение лесоматериалов от места складирования до места отправки потребителям, подачи в лесоперерабатывающие цехи;
- лесоперерабатывающие производства должны быть обеспечены связью с основными технологическими линиями при минимальном объеме транспортно-переместительных операций. Цехи для переработки деловых круглых лесоматериалов обычно располагают в конце сортировочных лесотранспортеров. Запасы сырья должны располагаться вблизи цеха. Цехи по переработке короткомерного, низкокачественного сырья и дров при поступлении на нижний склад хлыстов проектируют вблизи раскряжевочных установок;
- при смешанном примыкании, наиболее характерном для нижних лесопромышленных складов, к транспортным путям общего пользования необходимо обеспечить рациональное размещение подъездных путей с учетом минимума грузовой работы при погрузке различных видов готовой продукции со склада;
- при поступлении из лесосеки подсортированного сырья с различными размерно-качественными характеристиками необходимо специализировать отдельные участки на обработку определенного вида круглых лесоматериалов; - следует учитывать основные требования правил охраны труда и техники безопасности при проведении всех видов работ на складе;
- общие требования к проектированию лесных складов должны приводиться в соответствие с действующими инструкциями – СНиПами и другой необходимой документацией.
Общие положения по организации технологического процесса на нижних лесопромышленных складах
На рис. 3, 4 приведены наиболее типичные структурные схемы технологических потоков на нижних лесопромышленных складах при поступлении на них хлыстов и сортиментов. В то же время в зависимости от конкретных природно-производственных условий работы того или иного нижнего склада организация технологического процесса может несколько отличаться от предлагаемых схем.
В определенных природно-производственных условиях становится экономически эффективно и целесообразно специализировать технологические потоки на нижних лесных складах, проводя операцию по частичной сортировке хлыстов и круглых лесоматериалов в условиях лесосеки. Это позволяет значительно уменьшить объем транспортно-переместительных операций на складе, рационально использовать складские площади и упростить технологический процесс.
Технологический процесс при поступлении хлыстов может предусматривать разделение потоков по породам (хвойных и лиственных хлыстов), а при поступлении сортиментов – по породам (хвойных и лиственных), по категориям толщины (тонкомерных и крупномерных), по назначению (на отгрузку и переработку).
Часть из поступающих на склад хлыстов сразу же с автопоездов идет на раскряжевку, а остальные складируются в штабеля межсезонного запаса, откуда по мере необходимости подаются на переработку. На нижних складах во всех случаях, вне зависимости от применяемого для выполнения данной операции оборудования, раскряжевка хлыстов ведется по индивидуальному методу. Каждый хлыст раскраивается на части по оптимальной для него схеме, выбранной с учетом его размерно-качественных характеристик. После раскряжевки хлыстов на сортименты, как правило, сразу же отделяется дровяная древесина, которая поступает на отдельный поток.
Полученные деловые круглые лесоматериалы, как правило, делятся на две группы: сортименты, предназначенные для переработки на пилопродукцию, и сортименты для отгрузки с нижнего лесопромышленного склада в круглом виде. Некоторые из них сразу же подаются в лесоперерабатывающие цехи или на транспортные средства, а часть после сортировки и пакетирования в штабеля попадает на резервный склад круглых лесоматериалов.
Все нижние лесопромышленные склады при доставке на них из лесосеки сырья в виде сортиментов имеют существенные отличия от тех нижних складов, на которые привозят хлысты, как в организации технологического процесса, так и в применяемом оборудовании. На таких складах не выполняется важнейшая технологическая операция – раскряжевка хлыстов на сортименты, и нет соответствующего технологического и грузоподъемного оборудования. Операция сортировки круглых лесомате- риалов частично может выполняться на лесосеке или верхнем складе в процессе выполнения отдельных операций: раскряжевки, трелевки, погрузки.

Рис. 3. Структурная схема технологического потока типичного нижнего лесопромышленного склада при поступлении хлыстов

Рис. 4. Структурная схема технологического потока типичного нижнего лесопромышленного склада при поступлении сортиментов
Во многих случаях лесоматериалы, отправляемые потребителю в круглом виде (балансы, фанерный кряж и другие), дровяная древесина поставляются прямо с лесосеки, а на нижний склад поступают сортименты, подлежащие дальнейшей переработке непосредственно на предприятии.
Объективные тенденции развития нижних лесопромышленных складов в условиях рыночных отношений ведут к тому, что основными видами лесопродукции является продукция, полученная в лесоперерабатывающих и деревообрабатывающих цехах.