

Методы моделирования объектов автоматического управления
.pdf
|
|
1 |
S |
V |
|
|
)+ |
sin(α)P |
H |
|
δ |
|
|
sin(α)P |
δ |
p |
|
|
|
|
|
|
|
|
|||||||||||
H |
|
|
кр |
|
H |
H |
|
|
|
|
|||||||
= − |
|
|
|
|
p |
= − |
|
|
|||||||||
ay |
|
|
|
(ρCya + Cyaρ |
|
|
|
; ay |
|
|
|
||||||
|
|
M |
|
2 |
|
|
|
|
V |
|
|
|
|
|
MV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
ρVS |
C |
δ |
в |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
δв |
|
|
|
|
|
|
; aV = − ρV S b |
|
|
|
mαaV |
|
|
|
|
+ 2mz |
|
|
||||||||||||||||||||||
a |
= − |
|
|
кр |
|
ya |
a |
+ mV |
; |
|||||||||||||||||||||||||||||||||
|
|
y |
|
|
|
|
2M |
|
|
|
|
|
mz |
|
|
|
|
|
|
|
|
кр |
|
|
z y |
|
|
|
z |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Iz |
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
aθ |
= − ρV2 Sкрbamzα θy ; aα |
= − ρV2 Sкрba (mαz + mz y ; |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
mz |
2Iz |
|
|
|
|
|
|
|
|
|
|
|
mz |
|
|
2Iz |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
H |
= − |
V |
2 |
|
|
|
|
a ( |
ρ |
|
H |
+ m |
α |
) |
+ m |
ρ |
H |
) |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
a |
|
|
S |
|
b |
m |
; |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
z |
z |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
m |
|
|
|
2I |
|
|
кр |
|
|
|
( |
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
z |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aωz = − ρV2 Sкрba (mz |
|
|
|
|
mz z ); |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
mz |
|
|
|
2Iz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
δ |
p |
|
ρV |
2 |
|
|
|
|
|
|
|
δ |
|
|
|
δ |
|
|
|
|
ρV |
2 |
|
|
|
(mz |
|
|
δ |
|
). |
||||||||||
|
|
|
|
|
|
|
|
|
|
p |
|
|
в |
|
|
|
|
|
|
|
|
|
в |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
a |
|
|
|
|
= − |
|
|
Sкрbamz |
a |
y |
; |
a |
|
|
= − |
|
|
|
|
|
Sкрba |
|
y |
+ mz |
||||||||||||||||||
m |
z |
2I |
|
m |
z |
2I |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
;
Полученная |
система |
уравнений |
Отримана система рівнянь (2.83) є |
|||
(2.83) представляет собой систему ли- |
системою |
лінійних диференціальних |
||||
нейных дифференциальных уравнений |
рівнянь з |
постійними коефіцієнтами, |
||||
с постоянными коэффициентами, опи- |
що описують вимушений рух літака в |
|||||
сывающих вынужденное движение са- |
поздовжній площині відносно сталого й |
|||||
молета в продольной плоскости отно- |
незбуреного горизонтального польоту, |
|||||
сительно устойчивого и невозмущенно- |
іншими словами, у ε-околі. |
|||||
го горизонтального полета, |
другими |
|
|
|||
словами, в ε-окрестности. |
|
|
|
|
||
Дополнив эти уравнения соответ- |
Після доповнення цих рівнянь від- |
|||||
ствующими |
атрибутами |
(точностью |
повідними атрибутами (точністю лінеа- |
|||
линеаризации, |
параметрами |
устано- |
ризації, параметрами сталого стану, ді- |
|||
вившегося |
состояния, диапазонами и |
апазонами й характером вхідних і вихі- |
||||
характером входных и выходных сиг- |
дних сигналів, числовими значеннями |
|||||
налов, численными значениями коэф- |
коефіцієнтів, діапазоном і масштабом |
|||||
фициентов, |
диапазоном и |
масштабом |
змінення часу) отримаємо лінійну ма- |
|||
изменения времени), получим линей- |
тематичну |
модель поздовжнього руху |
||||
ную математическую модель продоль- |
літака. |
|
||||
ного движения самолета. |
|
|
|
|
||
101
Глава 3 НЕЛИНЕЙНАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
ШАГАЮЩЕГО РОБОТА «ANI» Розділ 3
НЕЛІНІЙНА МАТЕМАТИЧНА МОДЕЛЬ КРОКУЮЧОГО РОБОТА «ANI»
Тот, кто хочет видеть результаты |
Той, хто хоче бачити результати своєї |
||||||
своего труда немедленно, должен идти |
праці негайно, має працювати |
||||||
|
|
|
в сапожники. |
|
|
шевцем. |
|
Альберт Эйнштейн (1879–1955) − |
Альберт Ейнштейн (1879–1955) – |
||||||
|
|
|
немецкий физик |
|
|
німецький фізик |
|
Одними |
из |
мобильных |
объектов, |
Одними |
із |
мобільних об'єктів, |
|
сложных в управлении, считаются ша- |
складних для керування, уважають кро- |
||||||
гающие роботы, особенно четырёхно- |
куючі роботи, |
особливо чотириногі. |
|||||
гие. Сложность управления обуславли- |
Складність |
керування обумовлюється |
|||||
вается конструкцией робота и способом |
конструкцією робота й способом пере- |
||||||
его передвижения |
по пересеченной |
сування пересіченою місцевістю, коли |
|||||
местности, при котором нужно обеспе- |
потрібно забезпечити необхідну орієн- |
||||||
чить требуемую ориентацию относи- |
тацію відносно центра мас і рух зада- |
||||||
тельно центра масс и движение по за- |
ною траєкторією. Для якісного вирі- |
||||||
данной траектории. Для качественного |
шення завдань орієнтації і навігації |
||||||
решения задач ориентации и навигации |
крокуючого робота потребується багато |
||||||
шагающего робота требуется целый ряд |
моделей його руху. У розділі 3 описано |
||||||
моделей его движения. В главе 3 опи- |
змістовну, фізичну і нелінійну матема- |
||||||
саны содержательная, физическая и не- |
тичну моделі просторового руху робота |
||||||
линейная математическая модели про- |
«ANI». |
|
|
||||
странственного |
движения |
робота |
|
|
|
||
«ANI». |
|
|
|
|
|
|
|
3.1. Содержательная модель |
3.1. Змістовна модель |
||||||
шагающего робота |
|
крокуючого робота |
|||||
В современных технологиях про- |
У сучасних технологіях проекту- |
||||||
ектирования |
систем |
автоматического |
вання систем автоматичного керування |
||||
управления динамическими объектами |
динамічними об'єктами одним з найва- |
||||||
одним из важнейших этапов является |
жливіших етапів є дослідження основ- |
||||||
исследование основных свойств объек- |
них властивостей об'єкта автоматично- |
||||||
та автоматического управления с ис- |
го керування з використанням моделей. |
||||||
пользованием моделей. |
|
|
|
|
|||
Построение ряда моделей шагаю- |
Побудова багатьох моделей кро- |
||||||
щего робота «ANI», позволяющих по- |
куючого робота «ANI», що дають змогу |
||||||
лучить наиболее полную информацию |
отримати найбільш повну інформацію |
||||||
|
|
|
|
102 |
|
|
|
о свойствах ОАУ, целесообразно вы- |
про властивості ОАК, доцільно викону- |
||||||||
полнять |
на |
единой |
методологической |
вати на єдиній методологічній основі – |
|||||
основе – ЦИДИФАК-основе моделиро- |
ЦІДІФАК-основі моделювання, основ- |
||||||||
вания, основными принципами которой |
ними принципами якої є цілеспрямова- |
||||||||
являются целенаправленность, идеали- |
ність, ідеалізація, декомпозиція, ітера- |
||||||||
зация, декомпозиция, итерационность, |
ційність, формалізація, абстрагування й |
||||||||
формализация, абстрагирование и кон- |
контрольованість. Етапи та зв'язки, що |
||||||||
тролируемость. Этапы и связи, отра- |
відображають |
процес моделювання у |
|||||||
жающие |
процесс |
моделирования |
в |
формі методики, показано на рис. 3.1. |
|||||
форме |
методики, |
представлены |
|
|
|
|
|||
на рис. 3.1. |
|
|
|
|
|
|
|
|
|
Этап 1. Малогабаритный мобиль- |
Етап 1. Малогабаритний мобіль- |
||||||||
ный робот «ANI» можно примененять в |
ний робот «ANI» можна застосовувати |
||||||||
ряде задач, связанных с мониторингом |
в багатьох завданнях, пов'язаних з мо- |
||||||||
объектов в автономном режиме, осмот- |
ніторингом об'єктів в автономному ре- |
||||||||
ром аварийных зданий и предваритель- |
жимі, оглядом аварійних будівель і по- |
||||||||
ным контролем состояния потерпевших |
переднім контролем стану транспорт- |
||||||||
аварию транспортных средств. |
|
них засобів, що зазнали аварій. |
|
||||||
Робот может транспортировать по- |
Робот може транспортувати кори- |
||||||||
лезные грузы, масса которых не пре- |
сні вантажі, маса яких не перевищує 60 |
||||||||
вышает 60 % его массы [2]. В соответ- |
% його маси [2]. Відповідно до призна- |
||||||||
ствии с назначением робота целью мо- |
чення робота метою моделювання є ро- |
||||||||
делирования является разработка ряда |
зроблення ряду моделей робота «ANI» |
||||||||
моделей робота «ANI» как объекта ав- |
як об'єкта автоматичного керування для |
||||||||
томатического управления для изуче- |
вивчення особливостей динаміки його |
||||||||
ния особенностей динамики его движе- |
руху заданою траєкторією. |
|
|||||||
ния по заданной траектории. |
|
|
|
|
|
||||
Этап 2. Результаты моделирования |
Етап |
2. |
Результати моделювання |
||||||
позволят |
получить |
представление |
об |
дадуть змогу отримати уявлення про |
|||||
особенностях конструкции, компоновке |
особливості конструкції, компонування |
||||||||
основных узлов и механизмов, кинема- |
основних вузлів і механізмів, кінемати- |
||||||||
тической схеме, основных и вспомога- |
чну схему, основні й допоміжні рухи |
||||||||
тельных движениях звеньев механиче- |
ланок механічної частини робота (вер- |
||||||||
ской части робота (вербальная и графи- |
бальна і графічна моделі), кількісні й |
||||||||
ческая модели), количественных и каче- |
якісні характеристики статичних і ди- |
||||||||
ственных |
характеристиках статических |
намічних властивостей «ANI» на основі |
|||||||
и динамических свойств «ANI» на осно- |
формалізованого опису в нелінійному й |
||||||||
ве формализованного описания в нели- |
лінеаризованому вигляді (математична |
||||||||
нейном и линеаризованном виде (мате- |
модель). |
|
|
|
|||||
матическая модель). |
|
|
|
Побудований ряд моделей |
дасть |
||||
Построенный ряд |
моделей даст |
можливість синтезувати закони керу- |
|||||||
возможность |
синтезировать законы |
вання, |
які |
забезпечать |
сталий |
||||
управления, которые обеспечат устой- |
рух робота з необхідною якістю пози- |
||||||||
чивое движение робота |
с требуемым |
|
|
|
|
||||
|
|
|
|
|
103 |
|
|
|
|
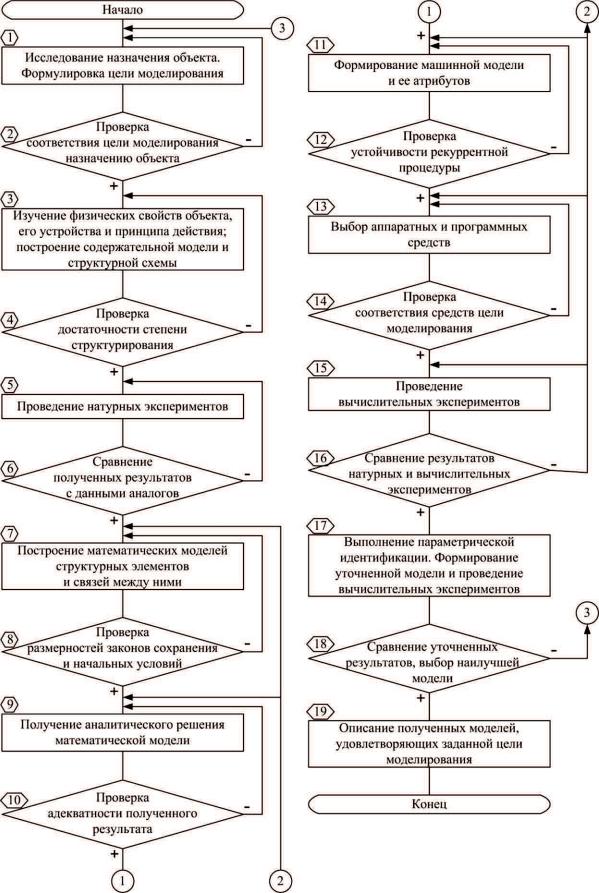
Рис. 3.1. Методика процесса
моделирования
104
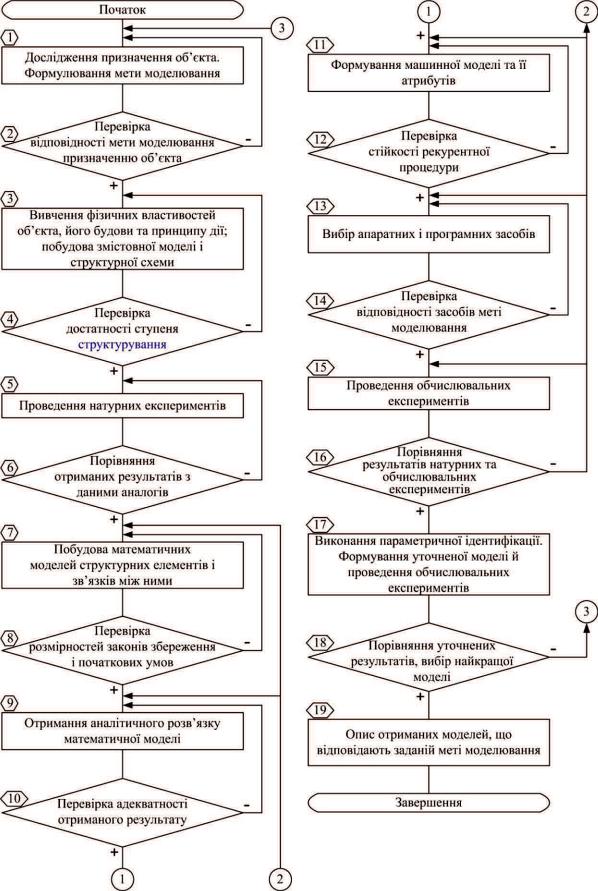
Рис. 3.1. Методика процесу
моделювання
105
качеством позиционирования на задан- |
ціонування на заданій траєкторії. Це, у |
ной траектории. Это, в свою очередь, |
свою чергу, буде основою виконання |
будет основой выполнения роботом за- |
роботом завдань цільового призначен- |
дач целевого назначения. |
ня. |
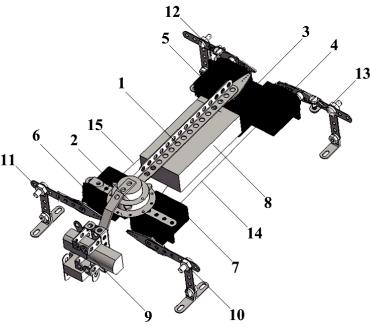
Этап 3. Шагающий робот «ANI» |
Етап 3. Крокуючий робот «ANI» є |
представляет собой четырехногий мно- |
чотириногим багатоланковим механіз- |
гозвенный механизм (рис. 3.2). |
мом (рис. 3.2). |
Рис. 3.2. Графическая 3D-модель |
Рис. 3.2. Графічна 3D-модель робота: |
|||
робота: 1 – несущая балка; 2 – передний |
1 – несна балка; 2 – передній шарнір; |
|||
шарнир; 3 – главный привод; |
3 – головний привід; 4−7 – приводи кі- |
|||
4−7 – приводы конечностей; 8 – блок |
нцівок; 8 – блок керування; |
|||
управления; 9 – узел крепления видео- |
9 – вузол кріплення відеокамери; |
|||
камеры; 10−13 – конечности; |
10−13 – кінцівки; |
|||
|
14, 15 – гибкие связи |
14, 15 – гнучкі зв’язки |
||
Предложенная |
кинематическая |
Запропоновану кінематичну схему |
||
схема и конструкция шагающего робо- |
й конструкцію крокуючого робота було |
|||
та была промоделирована с помощью |
змодельовано |
з допомогою пакета |
||
пакета |
SolidWorks 2013. Средствами |
SolidWorks 2013. Засобами цього пакета |
||
этого |
пакета было |
осуществлено |
було здійснено 3D-проектування окре- |
|
3D-проектирование отдельных компо- |
мих компонувальних деталей крокую- |
|||
новочных деталей шагающего робота и |
чого робота і складання об’єкта. Скла- |
|||
сборки объекта. Составные части мо- |
дові частини |
мобільного крокуючого |
||
бильного шагающего робота приведены |
робота наведено в табл. 3.1. |
|||
в табл. 3.1. |
|
|
|
|
106
|
|
|
Таблица 3.1 |
|
|
|
|
Таблиця 3.1 |
|
№ п/п |
Наименование элемента |
Количество, шт. |
||
Найменування елемента |
Кількість, шт. |
|||
|
||||
1 |
Аналоговый сервомотор SpringRC SR402P |
1 |
||
Аналоговий сервомотор SpringRC SR402P |
||||
|
|
|||
2 |
Аналоговый минисервопривод TowerPro SG90 |
1 |
||
Аналоговий мінісервопривід TowerPro SG90 |
||||
|
|
|||
3 |
Стандартный сервопривод TowerPro MG995 |
4 |
||
Стандартний сервопривід TowerPro MG995 |
||||
|
|
|||
|
Стабилизатор напряжения для питания серво- |
|
||
4 |
приводов |
|
5 |
|
Стабілізатор напруги для живлення сервопри- |
||||
|
|
|||
|
водів |
|
|
|
5 |
Цифровой акселерометр ADXL 345 |
1 |
||
Цифровий акселерометр ADXL 345 |
||||
|
|
|||
|
Веб-камера для обмена мгновенными сообще- |
|
||
6 |
ниями FaceCam 1320 |
|
1 |
|
Веб-камера для обміну миттєвими повідомлен- |
||||
|
|
|||
|
нями FaceCam 1320 |
|
|
|
7 |
Шарнир |
|
1 |
|
Шарнір |
|
|||
|
|
|
||
8 |
Металлическая планка |
|
56 |
|
Металева планка |
|
|||
|
|
|
||
9 |
Плата Arduino Nano 3.0 (ATmega328) |
1 |
||
Плата Arduino Nano 3.0 (ATmega328) |
||||
|
|
|||
10 |
Опорная пята |
|
4 |
|
Опорна п’ята |
|
|||
|
|
|
||
11 |
Провод |
|
22 |
|
Провід |
|
|||
|
|
|
||
12 |
Кабель Mini-B USB |
|
1 |
|
Кабель Mini-B USB |
|
|||
|
|
|
||
13 |
Блок питания |
|
1 |
|
Блок живлення |
|
|||
|
|
|
||
|
Удлинитель USB-ХАБ HAMA 2.0 1:4 HUB |
|
||
14 |
39873 |
|
1 |
|
Подовжувач USB-HUB HAMA 2.0 1:4 HUB |
||||
|
|
|||
|
39873 |
|
|
|
Шагающий робот собран из метал- |
Крокуючий |
робот складено з |
||
лического конструктора, в составе ко- |
металевого конструктора, який міс- |
|||
торого имеются пластины, планки и |
тить пластини, планки й кутові еле- |
|||
уголки с отверстиями, крепежные эле- |
менти з отворами, елементи кріплен- |
|||
|
107 |
|
||
менты. Конструктивная |
схема робота |
ня. Конструктивна схема робота скла- |
||
состоит из основной несущей балки, к |
дається з основної несної балки, до |
|||
концам балки прикреплены два моста с |
кінців балки прикріплено два мости з |
|||
возможностью |
вращения |
вокруг двух |
можливістю обертання навколо двох |
|
вертикальных |
осей |
соответственно. |
вертикальних осей відповідно. Задній |
|
Задний мост состоит из трех стандарт- |
міст складається з трьох стандартних |
|||
ных сервоприводов и двух ног, перед- |
сервоприводів і двох ніг, передній |
|||
ний мост – из двух сервоприводов и |
міст – з двох сервоприводів і двох ніг. |
|||
двух ног. Конечности шагающего робо- |
Кінцівки крокуючого робота, які |
|||
та, собранные из двух планок и угол- |
складено з двох планок і кутових еле- |
|||
ков, соединённых с помощью винтов и |
ментів, з'єднаних з допомогою гвинтів |
|||
гаек, являются опорами для рассматри- |
і гайок, є опорами для конструкції, що |
|||
ваемой конструкции. |
|
|
розглядається. |
|
Под балкой размещены крепления |
Під балкою розміщено кріплення |
|||
для установки стабилизаторов напря- |
для встановлення стабілізаторів на- |
|||
жения для питания сервоприводов и |
пруги для живлення сервоприводів і |
|||
плата управления. Шарнир, находя- |
плата керування. Шарнір, розташова- |
|||
щийся между сервоприводами передне- |
ний між сервоприводами переднього |
|||
го моста, и две тяги предназначены для |
моста, і дві тяги призначені для пере- |
|||
передачи движения от заднего моста к |
давання руху від заднього моста до |
|||
переднему. |
|
|
|
переднього. |
Конструкция корпуса робота имеет |
Конструкція корпусу робота має |
|||
симметричную |
форму |
относительно |
симетричну форму відносно поздовж- |
|
продольной оси. Конструкция конечно- |
ньої осі. Конструкція кінцівок нале- |
|||
стей относится к группе однорычажных |
жить до групи одноважільних односе- |
|||
односегментных схем (рис. 3.3) и имеет |
гментних схем (рис. 3.3) і має жорстку |
|||
жесткую конфигурацию с одной степе- |
конфігурацію з одним ступенем сво- |
|||
нью свободы (движение в вертикальной |
боди (рух у вертикальній площині). |
|||
плоскости). |
|
|
|
|
Положение корпуса робота может |
Положення корпусу робота може |
|||
изменяться в горизонтальной плоско- |
змінюватися в горизонтальній площи- |
|||
сти. Поскольку при изменении высоты |
ні. Оскільки при зміненні висоти мо- |
|||
может происходить |
проскальзывание |
же відбуватися проковзування кінці- |
||
конечностей, на ногах робота преду- |
вок, на ногах робота передбачено гу- |
|||
смотрена резиновая основа. При подъ- |
мову основу. При підйомі опорні точ- |
|||
еме опорные точки сдвигаются под |
ки зсуваються під нижню частину ко- |
|||
нижнюю часть корпуса, а при спуске |
рпусу, а при спуску відсуваються в |
|||
отодвигаются в стороны. |
|
сторони. |
||
Веб-камера прикреплена к основе, |
Веб-камеру прикріплено до ос- |
|||
состоящей из металлической пластины |
нови, яка складається із металевої |
|||
и вспомогательных планок. Веб-камера, |
пластини й допоміжних планок. Веб- |
|||
находящаяся в голове робота, вместе с |
камеру, що міститься в голові робота, |
|||
основой соединена с основной частью |
разом з основою з'єднано з основною |
|||
объекта (туловищем) с помощью двух |
частиною об'єкта (тулубом) з допомо- |
|||
|
|
|
108 |
|

Рис. 3.3. Схема конечностей |
Рис. 3.3. Схема кінцівок |
|||||||||
шагающего робота |
|
|
крокуючого робота |
|
||||||
изогнутых планок. Кроме того, веб- |
гою двох зігнутих планок. Крім того, |
|||||||||
камера приводится в движение с помо- |
веб-камера приводиться в рух за допо- |
|||||||||
щью минисервопривода, который рас- |
могою мінісервоприводу, розташовано- |
|||||||||
положен под камерой и также прикреп- |
го під камерою і також прикріпленого |
|||||||||
лен к металлической основе. Трехсте- |
до металевої |
основи. Триступеневий |
||||||||
пенной блок цифровых акселерометров |
блок цифрових акселерометрів розмі- |
|||||||||
находится ближе к переднему мосту, |
щено ближче до переднього моста, біля |
|||||||||
возле шарнира. |
|
|
|
шарніра. |
|
|
|
|
|
|
Мобильный |
шагающий робот |
Мобільний |
крокуючий |
робот |
||||||
«ANI» предназначен для передвижения |
«ANI» призначений для пересування як |
|||||||||
как по горизонтальной |
поверхности, |
по горизонтальній поверхні, так і по |
||||||||
так и по пересеченной местности. |
пересіченій місцевості. Керування об'є- |
|||||||||
Управление |
объектом рассмотренной |
ктом розглянутої |
структури зводиться |
|||||||
структуры сводится к управлению сер- |
до керування сервоприводами. У конс- |
|||||||||
воприводами. В конструкции исполь- |
трукції використовуються |
стандартні |
||||||||
зуются стандартные аналоговые серво- |
аналогові |
сервоприводи |
|
TowerPro |
||||||
приводы TowerPro MG995, управляе- |
MG995, |
|
керовані |
широтно- |
||||||
мые широтно-модулированными им- |
модульованими імпульсами. Ці сервоп- |
|||||||||
пульсами. Эти сервоприводы предна- |
риводи призначені для піднімання й |
|||||||||
значены для поднимания и опускания |
опускання опор конструкції та підтри- |
|||||||||
опор конструкции и поддержания ее в |
мки її у вертикальному положенні. Діа- |
|||||||||
вертикальном положении. |
Диапазон |
пазон обертання вихідного вала серво- |
||||||||
вращения выходного вала сервопривода |
приводу становить 180 градусів. Анало- |
|||||||||
составляет |
180 |
градусов. Аналоговый |
говий сервомотор SpringRC SR401P за- |
|||||||
сервомотор SpringRC SR401P обеспе- |
безпечує поворот заднього моста в го- |
|||||||||
чивает поворот заднего моста в гори- |
ризонтальній |
площині. З |
допомогою |
|||||||
зонтальной |
плоскости. |
С |
помощью |
шарніра і двох спеціальних тяг рух зад- |
||||||
|
|
|
|
109 |
|
|
|
|
|
|
шарнира и двух специальных тяг дви- |
нього моста передається на передній |
||||
жение заднего моста передается на пе- |
міст. Таким чином, один цикл перемі- |
||||
редний мост. Таким образом, один цикл |
щення складається з дванадцяти рухів: |
||||
перемещения |
состоит |
из |
двенадцати |
чотирьох поворотних рухів заднього й |
|
движений: четырёх поворотных движе- |
переднього мостів і восьми підйомно- |
||||
ний заднего и переднего мостов и вось- |
спускових рухів чотирьох кінцівок ро- |
||||
ми подъемно-спусковых движений че- |
бота. |
||||
тырех конечностей робота. |
|
|
|
||
Конструкция мобильного |
шагаю- |
Конструкція мобільного крокую- |
|||
щего робота позволяет |
реализовать |
чого робота дає змогу реалізувати шість |
|||
шесть различных вариантов движения, |
різних варіантів руху, а саме: уперед, |
||||
а именно: вперед, назад, вперед-вправо, |
назад, уперед-управо, уперед-уліво, на- |
||||
вперед-влево, назад-вправо, назад- |
зад-управо, назад-уліво. Веб-камера з |
||||
влево. Веб-камера с матрицей 1.3 МП и |
матрицею 1.3 МП і роздільністю відео |
||||
разрешением видео 1280x1024 пиксе- |
1280x1024 пікселів напрямлена в бік |
||||
лей направлена в сторону движения |
руху мобільної платформи. Аналоговий |
||||
мобильной |
платформы. |
Аналоговый |
мінісервопривід TowerPro SG90 забез- |
||
минисервопривод TowerPro SG90 обес- |
печує рух камери вліво-управо, унаслі- |
||||
печивает движение камеры влево- |
док чого відбувається сканування прос- |
||||
вправо, в результате чего происходит |
тору перед роботом. |
||||
сканирование пространства перед робо- |
|
||||
том. |
|
|
|
|
|
Робот «ANI» обладает ещё одной |
Робот «ANI» має ще одну функці- |
||||
функциональной особенностью – воз- |
ональну особливість − можливість від- |
||||
можностью |
восстанавливать |
рабочее |
новлювати робоче вертикальне поло- |
||
вертикальное положение. Для этого на |
ження. Для цього на кожному кроці за- |
||||
каждом шаге запускается проверка зна- |
пускається перевірка знака прискорен- |
||||
ка ускорения вдоль оси Z. Если знак |
ня вздовж осі Z. Якщо знак вектора си- |
||||
вектора силы тяжести |
отрицательный, |
ли тяжіння від’ємний, то робот втратив |
|||
то робот потерял устойчивое верти- |
стійке вертикальне положення (переки- |
||||
кальное положение (перевернулся) и |
нувся) і необхідно не крокувати, а запу- |
||||
необходимо не шагать, а запускать |
скати процедуру перевороту на ноги. |
||||
процедуру переворота на ноги. |
|
|
|||
Тяговым двигателем в этом объек- |
Тяговим двигуном у цьому об'єкті |
||||
те является |
сервопривод SpringRC |
є сервопривід SpringRC SR402P, статор |
|||
SR402P, статор которого жестко связан |
якого жорстко зв'язаний з корпусом |
||||
с корпусом ОАУ, а выходной вал ре- |
ОАК, а вихідний вал редуктора – з тя- |
||||
дуктора – с ведущим мостом. Одна нога |
говим мостом. Одна нога тягового мос- |
||||
ведущего моста и одна нога ведомого |
та й одна нога веденого моста під час |
||||
моста во время движения находятся в |
руху розташовуються у верхньому по- |
||||
верхнем положении. Крутящий момент, |
ложенні. Крутний момент, що створю- |
||||
создаваемый |
приводом, преобразуется |
ється приводом, перетворюється на тя- |
|||
в тяговое усилие с плечом, равным по- |
гове зусилля з плечем, яке дорівнює |
||||
ловине длины моста. |
|
|
|
половині довжини моста. |
|
110