

Методы моделирования объектов автоматического управления
.pdfПодставим эти значения в выражение (2.11):
|
|
|
-nt |
|
|
|
2 |
|
|
2 |
|
|
q = q |
|
e |
cos |
k |
- n |
t + |
||||||
|
|
|
|
|||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
q |
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
k |
2 |
- n |
2 |
|
|||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||
Підставимо ці значення у вираз
(2.11):
|
n |
|
|
2 |
|
2 |
|
|
|
sin |
k |
- n |
t + |
||||
|
|
|
||||||
|
|
|
|
|
||||
k |
2 |
- n |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
t |
k |
2 |
- n |
2 |
t. |
(2.13) |
sin |
|
|
В этом выражении первое слагаемое описывает колебания механического объекта, возникающие из-за его
начального отклонения |
q0 |
от положе- |
ния равновесия, а второе − колебания, обусловленные начальной скоростью q0 .
У цьому виразі перший доданок описує коливання механічного об’єкта, що виникли внаслідок його початкового відхилення q0 від положення рівно-
ваги, а другий − коливання, обумовлені початковою швідкістю q0 .
Частное решение дифференциального уравнения (2.10) получается, если задать конкретное выражение возму-
щающей силы |
Q |
F |
(t) . Для возмущаю- |
|
щей силы типовым воздействием является импульсное воздействие, описываемое функцией Дирака − дельта- функцией δ(t). Предположим, что возмущающая сила действует с момента времени t1, тогда
Частинний розв’язок диференціального рівняння (2.10) можна отримати, якщо задати конкретний вираз збу-
рювальної сили |
Q |
F |
(t) . Для збурюваль- |
|
ної сили типовим впливом є імпульсний вплив, що описується функцією Дірака – дельта-функцією δ(t). Припустимо, що збурювальна сила діє з моменту часу t1, тоді
q = q |
0 |
e |
-nt |
(cos |
k |
2 |
- n |
2 |
t + |
|
|
n |
sin |
k |
2 |
- n |
2 |
t) + |
|
|
|
0 |
|
e |
-nt |
sin |
k |
2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
- n |
|
|
|
|
|
|
|
k |
- n |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
1 |
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
+ |
|
|
|
|
∫δ(t1)e-n(t-t1)sin |
k2 - n2 (t - t1)dt. |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
a |
|
k2 - n2 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
-
n
2
t +
(2.14)
Это уравнение является |
общим |
Це |
рівняння |
є |
загальним |
|
решением дифференциального уравне- |
розв’язком диференціального рівняння |
|||||
ния (2.9) для случая малого сопротив- |
(2.9) для випадку малого опору при дії |
|||||
ления при действии импульсной воз- |
імпульсної збурювальної сили. Анало- |
|||||
мущающей |
силы. Аналогично можно |
гічно можна отримати розв’язки для |
||||
получить решения для других типовых |
інших |
типових впливів |
збурювальної |
|||
воздействий возмущающей силы: сту- |
сили: ступеневого, гармонійного, лі- |
|||||
пенчатого, |
гармонического, |
линейно |
нійно змінного. |
|
|
|
изменяющегося.
81
2.5. Пример построения уравнений |
2.5. Приклад побудови рівнянь |
|||||
|
математической модели |
математичної моделі |
||||
продольного движения самолета |
поздовжнього руху літака |
|||||
2.5.1. Построение нелинейных |
2.5.1. Побудова нелінійних рівнянь |
|||||
уравнений математической модели |
математичної моделі поздовжнього |
|||||
продольного движения самолёта |
руху літака |
|||||
Любой самолет представляет собой |
Будь-який літак є складною ієрар- |
|||||
сложную |
иерархическую |
систему, |
хічною системою, що складається з кі- |
|||
включающую в себя ряд взаимосвязан- |
лькох взаємозв'язаних підсистем та аг- |
|||||
ных подсистем и агрегатов. Большин- |
регатів. Більшість літаків складається з |
|||||
ство самолетов состоит из следующих |
таких складових частин: |
|||||
составных частей: |
|
|
|
|
||
1) корпус (фюзеляж), предназна- |
1) корпус (фюзеляж), призначений |
|||||
ченный для размещения основных агре- |
для розміщення основних агрегатів і |
|||||
гатов и груза, а также конструктивного |
вантажу, а також конструктивного |
|||||
сочленения всех подсистем самолета; |
зчленування всіх підсистем літака; |
|||||
2) аэродинамические управляющие |
2) аеродинамічні керувальні орга- |
|||||
органы – элероны, стабилизаторы (рули |
ни – елерони, стабілізатори (рулі висо- |
|||||
высоты) и киль (руль направления), ис- |
ти) і кіль (руль напрямку), що викорис- |
|||||
пользуемые для создания управляющих |
товуються для створення керувальних |
|||||
сил и моментов; |
|
|
|
сил і моментів; |
||
3) силовая установка, применяемая |
3) силова установка, що застосову- |
|||||
для создания силы тяги (иногда подъ- |
ється для створення сили тяги (іноді пі- |
|||||
емной и управляющей сил), а также |
днімальної і керувальної сил), а також |
|||||
обеспечения энергией подсистем и аг- |
забезпечення енергією підсистем та аг- |
|||||
регатов самолета; |
|
|
|
регатів літака; |
||
4) топливная система, включающая |
4) паливна система, що містить ре- |
|||||
в себя резервуары для хранения топли- |
зервуари для зберігання палива, магіст- |
|||||
ва, магистрали для их подачи, насосные |
ралі для його подавання, помпові стан- |
|||||
станции; |
|
|
|
|
ції; |
|
5) |
бортовая |
система |
управления, |
5) бортова система керування, при- |
||
предназначенная |
для |
решения задач |
значена для вирішення завдань навіга- |
|||
навигации, |
наведения, |
стабилизации, |
ції, наведення, стабілізації, контролю й |
|||
контроля и прогнозирования состояния |
прогнозування стану літака. |
|||||
самолета. |
|
|
|
|
|
|
Рассмотрим особенности управле- |
Розглянемо особливості керування |
|||||
ния самолетом и общие требования к |
літаком і загальні вимоги до керованого |
|||||
управляемому полету. Движение само- |
польоту. Рух літака в просторі визнача- |
|||||
лета |
в пространстве |
определяется |
ється початковими умовами і силами й |
|||
начальными условиями и действующи- |
моментами, що діють на літак. На літак |
|||||
ми на него силами и моментами. На са- |
діють сила тяги, аеродинамічні сили й |
|||||
молет действуют сила тяги, аэродина- |
сила тяжіння. Для керування рухом лі- |
|||||
82
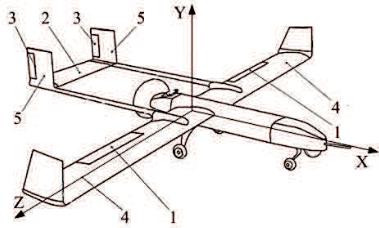
мические силы и сила тяжести. Для |
така зазвичай використовують аероди- |
||
управления движением самолета обыч- |
намічні й газодинамічні сили. На рис. |
||
но используют аэродинамические и га- |
2.5 показано схему літака, на якому як |
||
зодинамические силы. На рис. 2.5 пока- |
рульові органи застосовано елерони 1, |
||
зана схема самолета, на котором в каче- |
руль висоти (поворотний стабілізатор) |
||
стве рулевых органов применены эле- |
2 і рулі напрямку 3. Піднімальна сила |
||
роны 1, руль высоты (поворотный ста- |
літака створюється головним чином |
||
билизатор) 2 и рули направления 3. |
крилом 4, частиною якого є елерони, |
||
Подъемная |
сила самолета |
создается |
тому з допомогою елеронів можна змі- |
главным образом крылом 4, частью ко- |
нювати напрямок і частково величину |
||
торого являются элероны, поэтому с |
піднімальної сили. Стійкість і керова- |
||
помощью |
элеронов можно |
изменять |
ність літака забезпечується горизонта- |
направление и отчасти величину подъ- |
льним (поворотний стабілізатор 2) і ве- |
||
емной силы. Устойчивость и управляе- |
ртикальним (кілі 5 і рулі напрямку 3) |
||
мость самолета обеспечивается гори- |
оперенням. |
||
зонтальным (поворотный стабилизатор |
|
||
2) и вертикальным (кили 5 и рули направления 3) оперением.
Рис. 2.5. Схема расположения органов управления самолета
В вертикальной плоскости самолетом управляют с помощью рулей высоты, которые из нейтрального положения отклоняют вверх или вниз. Если рули отклонены вверх (вниз), то под действием встречного потока возникает аэродинамическая сила YC , создаваемая рулями высоты – стабилизаторами − и направленная вниз (вверх).
Момент MZC этой силы поворачивает самолет относительно оси OZ, уве-
Рис. 2.5. Схема розташування органів керування літака
У вертикальній площині літаком керують з допомогою рулів висоти, які з нейтрального положення відхиляють уверх або вниз. Якщо рулі відхилено вверх (униз), то під дією зустрічного потоку виникає аеродинамічна сила YC , яка створюється рулями висоти –
стабілізаторами − (уверх).
Момент MZC
літак відносно осі OZ, збільшуючи
83
личивая (уменьшая) угол атаки, вслед- |
(зменшуючи) кут атаки, унаслідок чого |
||||||
ствие чего изменяется подъемная сила |
змінюється піднімальна сила крил. При |
||||||
крыльев. При изменении подъемной си- |
зміненні піднімальної сили змінюється |
||||||
лы изменяется высота полета, а момент |
висота польоту, а момент MZC змінює |
||||||
MZC изменяет угол наклона продольной |
кут нахилу поздовжньої осі літака (кут |
||||||
оси самолета (угол тангажа). Другими |
тангажу). Іншими словами, рулі висоти |
||||||
словами, |
рули |
высоты |
предназначены |
призначені для керування кутом танга- |
|||
для управления углом тангажа и высотой |
жу і висотою польоту. |
||||||
полета. |
|
|
|
|
|
|
|
Управление самолетом в горизон- |
Керування літаком у горизонталь- |
||||||
тальной плоскости осуществляется эле- |
ній площині здійснюється елеронами і |
||||||
ронами и рулем направления. При |
рулем |
напрямку. При нейтральному |
|||||
нейтральном положении элеронов подъ- |
положенні |
елеронів |
піднімальні сили |
||||
емные силы правого и левого полукрыль- |
правого й лівого півкрил є однаковими. |
||||||
ев одинаковы. Если элероны отклоняются |
Якщо |
елерони відхиляються (правий |
|||||
(правый элерон поднимается, а левый – |
елерон піднімається, а лівий – опуска- |
||||||
опускается, и наоборот), то подъемная |
ється, і навпаки), то піднімальна сила |
||||||
сила полукрыла с поднятым элероном |
півкрила з піднятим елероном зменшу- |
||||||
уменьшается, а с опущенным – увеличи- |
ється, а з опущеним – збільшується. Рі- |
||||||
вается. Разность подъемных сил крыльев |
зниця піднімальних сил крил зумовлює |
||||||
обуславливает |
возникновение момента |
виникнення моменту |
MX відносно осі |
||||
MX относительно оси OX, называемого |
OX, який називають моментом крену. |
||||||
моментом крена. Под действием этого |
Під дією цього моменту літак кренить- |
||||||
момента самолет накреняется, а так как |
ся, а оскільки піднімальні сили зали- |
||||||
подъемные силы остаются перпендику- |
шаються перпендикулярними до пло- |
||||||
лярными к плоскостям крыльев, то обра- |
щин крил, то утворюються горизонта- |
||||||
зуются |
горизонтальные |
составляющие |
льні складові цих сил, напрямлені в бік |
||||
этих сил, направленные в сторону крена. |
крену. Під дією горизонтальних скла- |
||||||
Под действием горизонтальных состав- |
дових центр мас літака буде переміща- |
||||||
ляющих центр масс самолета будет пере- |
тися в горизонтальній площині в бік |
||||||
мещаться в горизонтальной плоскости в |
крену. Таким чином, з допомогою еле- |
||||||
сторону крена. Таким образом, с помо- |
ронів можна керувати кутом крену й |
||||||
щью элеронов можно управлять углом |
бічним рухом центра мас літака. |
||||||
крена и боковым движением центра масс |
|
|
|
|
|||
самолета. |
|
|
|
|
|
|
|
При отклонении руля направления |
При |
відхиленні |
руля напрямку |
||||
вправо или влево от нейтрального поло- |
вправо або вліво від нейтрального по- |
||||||
жения возникает аэродинамический мо- |
ложення виникає аеродинамічний мо- |
||||||
мент MY относительно оси OY, называ- |
мент MY відносно осі OY, який нази- |
||||||
емый моментом рыскания. Под действи- |
вають моментом рискання. Під дією |
||||||
ем этого момента самолет поворачивает- |
цього моменту літак повертається в го- |
||||||
ся в горизонтальной плоскости вправо |
ризонтальній площині вправо або вліво, |
||||||
или влево, т. е. изменяется угол рыска- |
тобто змінюється кут рискання літака. |
||||||
84
ния самолета. При этом изменяется так- |
При цьому змінюється також кут ков- |
|||
же угол скольжения – угол, образуемый |
зання – кут, утворений вектором швид- |
|||
вектором скорости и плоскостью сим- |
кості і площиною симетрії літака. Уна- |
|||
метрии самолета. В результате этого |
слідок цього виникає бічна сила, про- |
|||
возникает боковая сила, пропорциональ- |
порційна куту ковзання, що спричиняє |
|||
ная углу скольжения, вызывающая боко- |
бічний рух літака. Отже, з допомогою |
|||
вое движение самолета. Следовательно, с |
руля напрямку можна керувати кутами |
|||
помощью руля |
направления можно |
рискання й ковзання, а також бічним |
||
управлять углами рыскания и скольже- |
рухом центра мас літака. |
|
||
ния, а также боковым движением центра |
|
|
|
|
масс самолета. |
|
|
|
|
Управляемый полет самолета осу- |
Керований політ літака здійсню- |
|||
ществляется с помощью систем управле- |
ється з допомогою систем керування. |
|||
ния. Рассмотрим |
задачи, выполняемые |
Розглянемо завдання, що виконуються |
||
этими системами. В простейшем случае |
цими системами. У найпростішому ви- |
|||
самолет можно рассматривать как твер- |
падку літак можна розглядати як тверде |
|||
дое тело, движение которого характери- |
тіло, рух якого характеризується шіс- |
|||
зуется шестью степенями свободы. Для |
тьма ступенями свободи. Для керуван- |
|||
управления самолетом в общем случае |
ня літаком в загальному випадку необ- |
|||
необходимо создавать управляющие си- |
хідно створювати керувальні сили й |
|||
лы и моменты по трем взаимно перпен- |
моменти по трьох взаємно перпендику- |
|||
дикулярным осям и изменять их в соот- |
лярних осях і змінювати їх відповідно |
|||
ветствии с требуемыми законами управ- |
до необхідних законів керування. Ке- |
|||
ления. Управляющие силы и моменты |
рувальні сили й моменти формуються в |
|||
формируются в системе управления в со- |
системі керування відповідно до інфо- |
|||
ответствии с информацией о движении |
рмації про рух літака, при цьому сис- |
|||
самолета, при этом система управления |
тема керування повинна мати стільки |
|||
должна иметь столько каналов управле- |
каналів |
керування, скільки |
ступенів |
|
ния, сколько степеней свободы имеет |
свободи має керований об'єкт. |
|||
управляемый объект. |
|
|
|
|
Движение самолета можно рассмат- |
Рух літака можна розглядати як |
|||
ривать как комбинацию двух составля- |
комбінацію двох складових – поступа- |
|||
ющих − поступательного движения цен- |
льного руху центра мас і обертального |
|||
тра масс и вращательного движения во- |
руху навколо центра мас. Керування |
|||
круг центра масс. Управление движени- |
рухом центра мас є необхідним для то- |
|||
ем центра масс необходимо для того, |
го, щоб літак здійснював політ по зада- |
|||
чтобы самолет совершал полет по задан- |
ній траєкторії. Керування рухом навко- |
|||
ной траектории. Управление движением |
ло центра мас, або керування кутовими |
|||
вокруг центра масс, или управление уг- |
рухами, обумовлене тим, що літак по- |
|||
ловыми движениями, обусловлено тем, |
винен займати цілком конкретне поло- |
|||
что самолет должен занимать вполне |
ження |
відносно вектора |
швидкості |
|
определенное положение по отношению |
центра мас. |
|
||
к вектору скорости центра масс. |
|
|
|
|
Благодаря управлению движением |
Завдяки керуванню рухом літака |
|||
85

самолета достигаются: заданное каче- |
досягаються: задана якість перехідного |
|||||||||||||||||||||||||||
ство |
переходного процесса, точность |
процесу, |
точність |
виконання |
команд, |
|||||||||||||||||||||||
исполнения команд, слабая реакция на |
слабка реакція на вплив збурення, точ- |
|||||||||||||||||||||||||||
влияние возмущения, точность наведе- |
ність наведення на цілі, оптимальність |
|||||||||||||||||||||||||||
ния на цели, оптимальность движения, |
руху, безпека польоту. |
|
|
|
|
|
|
|
||||||||||||||||||||
безопасность полета. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Качественно решить сложные зада- |
|
Якісно вирішити складні завдання |
||||||||||||||||||||||||||
чи управления полетом самолета можно |
керування польотом літака можна шля- |
|||||||||||||||||||||||||||
путем |
автоматизации. |
|
Автоматизация |
хом автоматизації. Автоматизація ке- |
||||||||||||||||||||||||
управления полетом должна охватывать |
рування польотом має охоплювати всю |
|||||||||||||||||||||||||||
всю последовательность |
|
взаимосвязан- |
послідовність взаємозв'язаних функцій, |
|||||||||||||||||||||||||
ных функций, таких, как сбор информа- |
таких, як збір інформації про етапи й |
|||||||||||||||||||||||||||
ции об этапах и режимах полета, перера- |
режими польоту, перероблення й фор- |
|||||||||||||||||||||||||||
ботка и формирование законов управле- |
мування законів керування, виконання |
|||||||||||||||||||||||||||
ния, исполнение команд и т. д. Реализа- |
команд і т. ін. Реалізація процесів ав- |
|||||||||||||||||||||||||||
ция процессов автоматического управ- |
томатичного керування ґрунтується на |
|||||||||||||||||||||||||||
ления |
основывается на |
|
динамических |
динамічних властивостях |
|
літака, |
які |
|||||||||||||||||||||
свойствах самолета, которые могут быть |
можуть бути визначені на основі мате- |
|||||||||||||||||||||||||||
определены на основе математического |
матичного моделювання. |
|
|
|
|
|
|
|||||||||||||||||||||
моделирования. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Рассмотрим продольное движение |
|
|
Розглянемо поздовжній рух літа- |
||||||||||||||||||||||||
самолета. |
|
|
|
|
|
|
|
|
|
|
ка. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
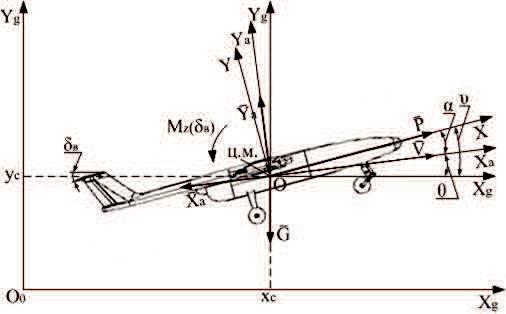
1. Физическая модель продольного |
|
1. Фізична модель поздовжнього |
||||||||||||||||||||||||||
движения самолета (рис. 2.6). |
руху літака (рис. 2.6). |
|
|
|
|
|
|
|
||||||||||||||||||||
На рис. 2.6 представлены: |
|
На рис. 2.6 показано: |
|
|
|
|
|
|
||||||||||||||||||||
а) системы |
координат: инерциаль- |
|
а) системи координат: інерціальна |
|||||||||||||||||||||||||
ная нормальная земная |
O |
0 |
X |
Y |
нормальна земна O |
0 |
X |
Y |
(НЗСК); |
но- |
||||||||||||||||||
|
|
|
g g (НЗСК); |
|
|
|
|
|
|
|
|
g g |
|
|
|
|
|
|
||||||||||
нормальная |
OX |
Y |
|
|
|
|
|
рмальна |
OX |
Y |
(НСК); |
|
швидкісна |
|||||||||||||||
|
g g (НСК); скоростная |
|
|
|
|
|
|
g g |
|
|
|
|
|
|
|
|
|
|||||||||||
OXaYa (ССК); связанная OXY (СвСК); |
OX |
Y (ШСК); зв’язана OXY |
(ЗСК); |
|||||||||||||||||||||||||
|
a a |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
б) силы, действующие на самолет: |
|
б) сили, що діють на літак: підні- |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
подъемная |
|
Y |
|
|
|
|
|
|
|
|
мальна Y ; лобового опору |
X |
a |
; тяги P ; |
||||||||||||||
|
a ; лобового сопротивления |
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
||||||||||||
Xa ; тяги P |
|
|
|
|
|
|
|
|
|
|
ваги G ; |
|
|
|
|
|
|
|
|
|
|
|
||||||
; веса G ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
в) параметры продольного движе- |
|
в) параметри поздовжнього руху: |
||||||||||||||||||||||||||
повітряна швидкість |
V ; кути атаки |
α , |
||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||
ния: воздушная скорость V ; углы атаки |
||||||||||||||||||||||||||||
α , тангажа υ, наклона траектории θ , |
тангажу |
υ, нахилу траєкторії |
|
θ , відхи- |
||||||||||||||||||||||||
отклонения руля высоты |
δв ; координаты |
лення руля висоти |
δв ; координати по- |
|||||||||||||||||||||||||
положения центра масс xc , yc . |
ложення центра мас xc , yc . |
|
|
|
||||||||||||||||||||||||
|
2. Визначення |
|
ступенів |
|
свободи, |
|||||||||||||||||||||||
2. Определение степеней свободы, |
|
|
|
|||||||||||||||||||||||||
вибір узагальнених координат. |
|
|
||||||||||||||||||||||||||
выбор обобщенных координат. |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Продольное движение характери- |
|
|
Поздовжній рух характеризується |
||||||||||||||||||||||||
зуется тремя степенями свободы. В каче- |
трьома ступенями свободи. Як узагаль- |
|||||||||||||||||||||||||||
86
стве обобщенных координат, однозначно |
нені координати, що однозначно визна- |
||
определяющих положение самолета в |
чають положення літака у вертикальній |
||
вертикальной плоскости, можно выбрать |
площині, можна вибрати координати |
||
координаты положения центра масс xc , |
положення центра мас xc , yc , і кут |
||
yc и угол тангажа υ. |
тангажу υ. |
||
|
|
|
|
|
|
|
|
Рис. 2.6. Физическая модель продольного движения самолета
3. Выражение для кинетической энергии продольного движения.
Кинетическую энергию (КЭ) продольного движения можно представить в виде двух составляющих – КЭ переносного движения центра масс и КЭ относительного вращательного движения вокруг центра масс:
Рис. 2.6. Фізична модель поздовжнього руху літака
3. Вираз для кінетичної енергії поздовжнього руху.
Кінетичну енергію (КЕ) поздовжнього руху можна подати у вигляді двох складових – КЕ переносного руху центра мас і КЕ відносного обертального руху навколо центра мас:
T = Te + Tr , |
(2.15) |
|
где Te – кинетическая энергия пере- |
де Te – кінетична енергія переносного |
|
носного поступательного движения; |
поступального руху; |
|
Tr – кинетическая энергия относи- |
Tr – кінетична енергія відносного |
|
тельного вращательного движения. |
обертального руху. |
|
КЭ переносного движения запи- |
КЕ переносного руху запишемо у |
|
шем в виде |
вигляді |
|
87
T |
e |
= |
1 |
2 |
, |
|
|
MV |
|||
|
|
|
2 |
c |
|
|
|
|
|
|
(2.16)
где M |
– масса самолета; |
Vc |
– абсолютная скорость центра |
масс.
КЭ относительного движения представим как
де M |
– маса літака; |
Vc |
– абсолютна швидкість центра |
мас. |
|
КЕ відносного руху подамо як
T |
r |
|
=
1 2
I |
2 |
ω |
|
z |
|
,
(2.17)
где Iz – момент инерции самолета относительно боковой оси Z;
ω – угловая скорость вращения вокруг центра масс.
Выразим линейную и угловую скорости через обобщенные координаты:
де Iz – момент інерції літака відносно бокової осі Z;
ω – кутова швидкість обертання навколо центра мас.
Виразимо лінійну й кутову швидкості через узагальнені координати:
Vc = V = Vx i + Vy j = |
c |
i |
|
y |
j |
; |
||||
|
|
|
|
|
|
|
|
|
|
|
V |
2 |
= V |
2 |
= (xc i yc j |
|
|
2 |
|
2 |
; |
|
|
|
x c |
y c |
||||||
(2.18)
(2.19)
где
i
,
j
,
k
ω = ωzk
2 |
2 |
= |
( |
ω |
= ω |
|
|
|
z |
|
|
– единичные орты НСК. |
де |
||
= |
|
|
|
|
|
|
|
|
|
k ; |
|||
|
|
|
|
2 |
|
|
|
|
|
|
|
||
|
k |
|
|
|
||
i |
, |
|
j , |
|||
k
(2.20)
2 |
, |
(2.21) |
|
– одиничні орти НСК.
После подстановки (2.19), (2.21) в |
Після підстановки (2.19), (2.21) у |
(2.16), (2.17) с учетом (2.15) запишем |
(2.16), (2.17) з урахуванням (2.15) за- |
|
пишемо |
|
1 |
|
|
2 |
|
|
T = |
M(x |
) |
|
. |
(2.22) |
|
2 |
z |
|||||
|
2 |
|
|
|
|
4. Определим обобщенные силы, |
4. Визначимо узагальнені сили, для |
для чего запишем выражения для эле- |
чого запишемо вирази для елементарної |
ментарной работы всех сил вдоль вы- |
роботи всіх сил уздовж вибраних уза- |
бранных обобщенных координат: |
гальнених координат: |
δAxc = Qxc δxc = Pcos(υ)δxc − Xa cos(θ)δxc − Ya sin(θ)δxc; |
(2.23) |
|||
|
|
Qx |
= Pcos(υ)− Xa cos(θ)− Ya sin(θ); |
(2.24) |
|
|
|
c |
|
δAy |
= Qy |
δyc = Psin(υ)δyc − Xa sin(θ)δyc + Ya cos(θ)δyc − Gδyc ; (2.25) |
||
c |
|
c |
|
|
|
|
Qy = Psin(υ)− Xa sin(θ)+ Ya cos(θ)− G ; |
(2.26) |
|
|
|
c |
|
|
|
|
|
δAυ = Qυδυ = Mzδυ ; |
(2.27) |
|
|
|
Qυ = Mz . |
(2.28) |
88
5. Продифференцируем выражение |
5. |
Здиференціюємо вираз для кіне- |
для кинетической энергии (2.22): |
тичної |
енергії (2.22): |
∂T |
= 0 |
; |
∂T |
= Mxc |
; |
d ∂T |
= Mxc |
; |
|||||||||
∂x |
|
|
∂x |
|
|
dt ∂x |
|
|
|||||||||
c |
|
|
c |
|
|
|
|
c |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
∂T = 0; |
∂T = My |
c |
; d ∂T = My |
c |
; |
||||||||||||
∂y |
c |
|
|
∂y |
c |
|
|
dt ∂y |
c |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
∂T |
= 0 |
; |
∂T |
= I |
υ ; |
d ∂T |
= I . |
|
∂υ |
∂υ |
dt ∂υ |
||||||
|
|
|
|
|
(2.29)
(2.30)
(2.31)
6. |
Составим |
дифференциальные |
6. Складемо диференціальні рів- |
|
уравнения продольного движения са- |
няння поздовжнього руху літака вихо- |
|||
молета исходя из уравнений Лагранжа |
дячи з рівнянь Лагранжа другого роду |
|||
второго рода (2.8) с учетом выражений |
(2.8) з урахуванням виразів (2.21), |
|||
(2.21), |
(2.24), |
(2.26), |
(2.28), |
(2.24), (2.26), (2.28), (2.29)–(2.31): |
(2.29)–(2.31):
Mx |
|
P |
(υ)− Xa cos(θ)− Ya sin(θ); |
Myc |
P |
|
(υ)− Xa sin(θ)+ Ya cos(θ)− G; |
|
|
|
Iz |
z |
M |
z . |
(2.32)
(2.33)
(2.34)
Выразим проекции абсолютного ускорения центра масс через воздушную скорость и угол наклона траектории, а угол тангажа − через угол наклона траектории и угол атаки:
Виразимо проекції абсолютного прискорення центра мас через повітряну швидкість і кут нахилу траєкторії, а кут тангажу − через кут нахилу траєкторії і кут атаки:
x |
V |
d |
cos |
V |
Vcos |
||||
|
|
dt |
|
|
y |
V |
d |
sin |
V |
Vsin |
||||
|
c |
dt |
|
|
|
|
|
|
υ = θ + α ,
sin |
Vθ ; |
cos |
Vθ ; |
(2.35)
(2.36)
(2.37)
тогда уравнения (2.32)–(2.34) примут |
тоді рівняння (2.32)–(2.34) наберуть ви- |
||||||
вид |
|
|
гляду |
|
|
||
M(cos(θ) V sin |
)V |
P |
(θ + α)− Xa cos(θ)− Ya sin(θ); |
(2.38) |
|||
M(sin(θ) V cos |
)V |
P (θ + α)− Xa sin(θ)+ Ya cos(θ)− G; |
(2.39) |
||||
|
|
Iz |
|
M |
z . |
|
(2.40) |
|
|
|
|
|
|||
Дополним уравнения |
динамики |
|
Доповнимо рівняння динаміки кі- |
||||
кинематическими соотношениями: |
нематичними співвідношеннями: |
|
|||||
|
|
z ; υ = θ + α; H V |
θ), |
(2.41) |
|||
где H – вертикальная скорость. |
|
де H – вертикальна швидкість. |
|
||||
89

Аэродинамические |
силы опреде- |
Аеродинамічні сили визначаються |
ляются следующими |
соотношениями |
такими співвідношеннями [1]: |
[1]: |
|
|
Xa
= Cxa
ρV |
2 |
|
|
2 |
|
Sкр
;
Ya
=
C
ya
ρV 2
2
Sкр
;
Mz
= mza
ρV |
2 |
|
|
2 |
|
S |
b |
a |
кр |
|
,
(2.42)
где Cxa , Cya , mza |
– аэродинамические |
коэффициенты; |
|
ρ = ρ(H) – плотность воздуха;
Sкр |
– площадь крыла; |
ba |
– средняя аэродинамическая |
де |
Cxa |
, Cya , |
mza – аеродинамічні кое- |
фіцієнти; |
|
||
|
ρ = ρ(H) |
– густина повітря; |
|
|
Sкр |
– площа крила; |
|
|
ba |
– середня аеродинамічна хорда |
|
хорда крыла. |
крила. |
Аэродинамические коэффициенты |
Аеродинамічні коефіцієнти можна |
можно представить наиболее суще- |
подати найбільш істотними залежнос- |
ственными зависимостями [1]: |
тями [1]: |
Cxa = Cxa (V, H, α); Cya = Cya (V, H, α, δв ); mza = mza (V, H, α, |
, |
, δв ), (2.43) |
где
δ
в
– отклонение руля высоты;
P
=
P
(
де
V,
δв H,
– відхилення руля висоти;
δр ),
(2.44)
где δр – отклонение органа управления двигателем.
де δр – відхилення органа керування двигуном.
2.5.2. Получение линеаризованных |
2.5.2. Отримання лінеаризованих |
||
уравнений математической модели |
рівнянь математичної моделі |
||
продольного движения самолета |
поздовжнього руху літака |
||
Для получения линеаризованных |
Для отримання лінеаризованих рі- |
||
уравнений математической модели |
внянь математичної моделі поздовж- |
||
продольного движения будем исполь- |
нього руху застосуємо метод аналітич- |
||
зовать метод аналитической линеариза- |
ної лінеаризації, що ґрунтується на |
||
ции, основанный на разложении нели- |
розвиненні |
нелінійних |
рівнянь |
нейных уравнений (2.38)–(2.44) в ряд |
(2.38)–(2.44) у ряд Тейлора. Як почат- |
||
Тейлора. В качестве начальных условий |
кові умови візьмемо параметри сталого |
||
примем параметры устойчивого и не- |
і незбуреного горизонтального польоту: |
||
возмущенного горизонтального полета: |
|
|
|
V0, θ0, υ0, α0, P0, Xa0, Ya0, Mz0 = 0, ωz0 = 0, H |
0 . |
(2.45) |
Разложение уравнения (2.38) в ряд |
Розвинення рівняння (2.38) у ряд |
Тейлора: |
Тейлора: |
90