

Методы моделирования объектов автоматического управления
.pdfный центр масс ОАУ (см. рис. 3.6): |
щений центр мас ОАК (див. рис. 3.6): |
y = yцм′
где
yцм′ = 0, xцм′ = a′sin(ϕ1)− b 2
− K
де
1−
1 |
( |
|
x − |
CD |
|
a′ |
b |
|
|
|
|
b |
|
|
a′ |
||
xцм′
2
−
),
1− cos ϕ1 2
(3.11)
– координаты смещенного центра масс. |
– координати зміщеного центра мас. |
|
Решая совместно (3.10), (3.11), |
Розв’язуючи разом |
(3.10), (3.11), |
определяем координаты проекции сме- |
визначаємо координати |
проекції змі- |
щенного центра масс на прямую, про- |
щеного центра мас на пряму, що про- |
|
ходящую через точки C и D: |
ходить через точки C і D: |
|
xцм′′ = |
K |
CD |
|
||
|
|
|
|||
|
2 |
|
+1 |
||
|
K |
|
|
||
|
CD |
||||
|
|
|
|
||
|
|
|
|
yцм′′ |
|
y |
цм′ |
− y |
C |
||
|
|
|
|||
= y |
C |
+ K |
|||
|
|
|
|
||
+ |
1 |
|
K |
||
|
||
|
CD |
|
( |
|
CD |
x |
цм |
|
x
′′
цм′ − x
+
C
K |
CD |
x |
C |
|
|
||
). |
|
|
|
;
(3.12)
(3.13)
Из выражений (3.11)–(3.13) опре- |
З виразів (3.11)–(3.13) визначаємо |
деляем смещение центра масс ОАУ: |
зміщення центра мас ОАК: |
ξ = |
y |
цм′ |
− y |
цм′′ |
2 |
+ |
x |
цм′ |
− x |
цм′′ |
|
||||||||||
|
|
|
|
|
|
|
2
.
(3.14)
Кинетическая энергия сервоприво- |
|
|
|
Кінетична енергія сервоприводу |
||
да |
|
|
|
|
|
|
|
пр |
2 |
|
|
||
T = |
Jсп |
|
|
1 |
, |
(3.15) |
|
|
|||||
|
|
|
|
|||
5 |
2 |
|
|
|
|
|
|
|
|
|
|
||
где Jсппр – приведенный момент инерции |
де Jсппр – зведений момент інерції сер- |
|||||
сервопривода, включающий в себя мо- |
воприводу, що містить момент інерції |
|||||
мент инерции электродвигателя и при- |
електродвигуна й зведений до нього |
|||||
веденный к нему момент инерции ре- |
момент інерції редуктора. |
|
||||
дуктора. |
|
|
|
|
|
|
Полная кинетическая энергия рас- |
|
|
|
Повна кінетична енергія ОАК, що |
||
сматриваемого ОАУ |
розглядається, |
|
||||
T = mкp x2 + Jкp
2 2
ϕ |
2 |
+ |
Jзмz |
2 |
+ |
Jпм |
2 |
2 |
2 |
пр |
2 |
. |
(3.16) |
|
|
ϕ |
|
|
|
|
|
|
|||||
|
5 |
|
2 |
1 |
|
2 |
3 |
|
|
|
1 |
|
|
Найдем компоненты уравнения (3.1), для чего определим производные кинетической энергии:
Знайдемо компоненти рівняння (3.1), для чого визначимо похідні кінетичної енергії:
121
dt
∂T
∂ϕ1
|
∂T |
= ( |
|
|
зм |
|
пм |
пр |
1 ; |
|
||||||
|
∂ϕ |
(ϕ1)+ Jz |
+ Jz |
+ Jсп ) |
|
|||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂T |
= 1 f2 (ϕ1) 2 m АУ |
|
|
2 ; |
|
||||||||||
∂ϕ |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
ϕ |
+ J |
зм |
+ J |
пм |
+ J |
пр |
|
|
|
|
|
|
( |
|
( |
z |
z |
|
сп ) |
2 |
( |
1) |
||||||
|
|
1) |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1
,
(3.17)
(3.18)
(3.19)
где
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
( |
ϕ |
) |
= |
a |
|
кр |
|
|
( |
ϕ |
) |
− |
|
f |
|
m |
cos |
|||||||||||
|
|
|
||||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||||
1 |
|
1 |
|
|
4 |
|
|
|
|
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де
sin
ba
(
ϕ1)
2 −
(1
1
− −
cos
cos
(
ϕ1
ϕ1
)
)
2
2
+
f
(cos
−
+2J
кp |
|
|
|
sin |
2 |
(ϕ |
) |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1 |
|
|
|
|
; |
|
+Jz |
b |
2 |
|
|
|
|
|
|
)) |
||
|
|
|
|
|
( |
|
2 |
||||
|
|
− 1− cos |
ϕ |
||||||||
|
|
|
|
( |
|
|
|
1 |
|
||
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin( |
ϕ |
) 1− cos |
( |
ϕ |
) |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
a |
|
|
кр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
(ϕ )= |
m |
cos(ϕ |
) |
− |
|
|
|
|
1 |
( |
|
|
|
|
|
|
|
1 |
|
|
−sin(ϕ |
|
)− |
|
|
|||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 1− cos ϕ |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
(ϕ1) − cos(2ϕ1)) |
|
− (1− cos(ϕ1))2 |
|
|
+ sin2 |
(ϕ1)(1− cos( |
ϕ1))2 |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
− (1− cos(ϕ1)) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
b |
|
2 |
|
|
(1− cos(ϕ1))2 |
|
|
|
|
|
(ϕ1)(1− cos(ϕ1)) |
|
|
|
|
||||||||||||||||||||||||
|
|
cos(ϕ1) |
|
− |
|
|
+ sin2 |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
кр |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin(ϕ1); |
|
|||||||
z |
|
|
|
|
|
|
|
|
|
|
|
b |
2 |
|
(1− cos(ϕ1)) |
2 |
2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
(ϕ |
)= ξ |
∂ξ |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
∂ϕ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
122 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Запишем выражение для обобщен- |
Запишемо вираз для узагальненої |
ной силы Qϕ . Для этого найдем сумму |
сили Qϕ . Для цього знайдемо суму |
1 |
1 |
элементарных работ: |
елементарних робіт: |
4 ∑δAi i=1
= M |
кр |
δϕ |
2 |
|
|
− M δϕ − M δϕ |
2 |
||
c2 |
1 |
c4 |
|
−
M δϕ |
|
c3 |
1 |
,
(3.20)
где |
Mкр |
– крутящий момент на валу |
сервопривода; |
||
|
Mc2 |
– момент сопротивления в пя- |
те задней опорной конечности; |
||
|
Mc3 |
– момент сопротивления шар- |
нира; |
|
|
|
Mc4 |
– момент сопротивления в пя- |
те передней опорной конечности. |
||
|
Обобщенную силу найдем, разде- |
|
лив |
выражение суммарной работы |
|
(3.20) на вариацию δϕ1 |
: |
де |
Mкр |
– крутильний момент на валу |
сервоприводу; |
||
|
Mc2 |
– момент опору в п’яті задньої |
опорної кінцівки; |
||
|
Mc3 |
– момент опору шарніра; |
|
Mc4 |
– момент опору в п’яті перед- |
ньої опорної кінцівки.
Узагальнену силу знайдемо, поді-
ливши вираз сумарної роботи (3.20) на варіацію δϕ1:
4
∑δAi
Qϕ1 = i=δϕ1 1
где
f |
3 |
( |
ϕ |
) |
=1 |
− |
|
|
1 |
|
|
|
= Mкрf3 (ϕ1)− Mc2 − Mc3 − Mc4f3 (ϕ1), (3.21)
|
|
де |
|
|
|
|
|
|
sin(ϕ ) |
|
|
||
|
|
|
1 |
|
. |
|
|
|
2 |
|
|
||
b |
|
|
2 |
|||
− 1 |
− cos |
ϕ |
||||
|
|
|
||||
|
|
1 |
|
|||
a |
|
|
|
|
||
С учетом (3.17)–(3.21) уравнение |
З урахуванням (3.17)–(3.21) рів- |
Лагранжа (3.1) запишем в таком виде: |
няння Лагранжа (3.1) запишемо в тако- |
|
му вигляді: |
|
|
A(ϕ1) |
|
2 ( 1) |
2 |
|
2 |
|
|
|
|
|
1 |
1 |
2 1 1 |
4 1 ψ |
|
|
|
||
|
|
= Mкрf3 (ϕ1)− Mc2 − Mc3 − Mc4f3 (ϕ1), |
|
|
(3.22) |
|||||
где A(ϕ )= f (ϕ )+ Jзм + Jпм + Jпр . |
|
де A(ϕ )= f (ϕ )+ Jзм + Jпм + Jпр . |
||||||||
1 |
1 1 |
z |
z |
сп |
|
1 |
1 1 |
z |
z |
сп |
Далее найдем компоненты уравне- |
Далі знайдемо компоненти рівнян- |
123

ния (3.2), для чего также определим |
ня (3.2), для чого також визначимо по- |
|
производные кинетической энергии по |
хідні кінетичної енергії за змінними |
ψ |
переменным ψ и : |
і : |
|
∂T |
= m |
2 |
|
||
|
|
|
Ro |
; |
|
∂ψ |
|
||||
|
|
|
|||
|
|
|
|
||
∂T |
= 0 |
; |
|
|
|
∂ψ |
|
|
|||
|
|
|
|
||
d ∂T |
= m |
R |
2 |
||
|
|
||||
∂ψ |
o |
||||
|
|
||||
dt |
|
|
|
||
4 |
1 |
1
ψ
.
(3.23)
(3.24)
(3.25)
Запишем выражение для обобщен- |
Запишемо вирази для узагальненої |
ной силы Qψ . Для этого найдем сумму |
сили Qψ . Для цього знайдемо суму |
элементарных работ активных сил: |
елементарних робіт активних сил: |
2 ∑
i=1
δA
ψi
=
Pдв
H
цм
δψ
+
P |
ξδψ |
ОАУ |
|
,
(3.26)
где Pдв – движущая сила, вызванная
крутящим моментом и приложенная к центру масс ОАУ;
PОАУ = mОАУg – сила тяжести. Обобщенную силу найдем, разде-
лив выражение суммарной работы (3.26) на вариацию δψ :
де Pдв – рушійна сила, спричинена кру-
тильним моментом і прикладена до центра мас ОАК;
PОАУ = mОАУg – сила тяжіння. Узагальнену силу знайдемо, поді-
ливши вираз сумарної роботи (3.26) на варіацію δψ :
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑δAψi |
|
|
|
|
|
|
|
|
|
||
Q |
ψ |
= |
i=1 |
= P |
H |
цм |
+ P ξ . |
(3.27) |
||||||
|
|
|
||||||||||||
|
|
|
δψ |
|
|
дв |
|
|
|
ОАУ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Движущая сила может быть опре- |
|
|
Рушійна сила може бути визначена |
|||||||||||
делена из геометрических соображе- |
із геометричних міркувань: |
|
||||||||||||
ний: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
= |
2 |
cos(ϕ |
− ϕ )M |
|
, |
(3.28) |
||||||
|
|
|
||||||||||||
|
|
дв |
|
a |
2 |
|
1 |
|
кр |
|
|
|||
где |
|
|
|
|
|
де |
|
|
|
|
|
|
|
|
ϕ2 = π + ϕ1 − arcsin |
a |
(1− cos(ϕ1)) . |
|
|||||||||||
|
|
|||||||||||||
2 |
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
С учетом (3.23)–(3.28) уравнение |
|
|
З урахуванням (3.23)–(3.28) рів- |
|||||||||||
Лагранжа (3.2) запишем в таком виде: |
няння Лагранжа (3.2) запишемо в тако- |
|||||||||||||
124

где
f5
(
ϕ1
)
=
mОАУ
R
f |
|
5 |
|
2 |
; |
o |
|
(
ϕ1
)
2f 
му вигляді:
f |
|
)Mкр + PОАУξ |
(ϕ1), |
|
|
|
|||
де f5 |
2 |
; |
|
|
(ϕ1)= mОАУRo |
|
|||
(3.29)
f6 (ϕ1)= |
2H |
цм |
π |
− arcsin |
a |
(1− cos(ϕ1)) |
|
|
|
cos |
|
|
. |
||||
a |
2 |
|
||||||
|
|
b |
|
|
||||
Выражения (3.22), (3.29) не позволяют определить траекторию центра масс ОАУ. Для этого необходимо получить выражения для абсолютной скорости.
Скорость центра масс может быть представлена в виде векторной суммы скоростей переносного движения несущей балки в плоскости OXY и относительного движения ОАУ как твердого тела вокруг оси, проходящей через две опорные точки при опрокидывании (см. рис. 3.6):
Вирази (3.22), (3.29) не дають змоги визначити траєкторію центра мас ОАК. Для цього необхідно отримати вирази для абсолютної швидкості.
Швидкість центра мас може бути подана у вигляді векторної суми швидкостей переносного руху несної балки в площині OXY і відносного руху ОАК як твердого тіла навколо осі, що проходить через дві опорні точки при перекиданні (див. рис. 3.6):
vцм
= ve цм
+
vцмr
,
(3.30)
где |
vцм |
– вектор абсолютной скорости |
|
центра масс ОАУ; |
|||
|
|
цмe |
– вектор переносной скорости; |
|
v |
||
|
|
цмr |
– вектор относительной скоро- |
|
v |
||
сти.
В силу симметричности механической части ОАУ переносная скорость центра масс направлена вдоль оси Х и определяется выражением (3.4). Относительное движение является вращательным с угловой скоростью  и радиусом Ro (см. рис. 3.6, б):
и радиусом Ro (см. рис. 3.6, б):
де |
vцм |
– вектор абсолютної швидкості |
|
центра мас ОАК; |
|||
|
|
цмe |
– вектор переносної швидкості; |
|
v |
||
|
|
цмr |
– вектор відносної швидкості. |
|
v |
||
Унаслідок симетричності механічної частини ОАК переносна швидкість центра мас напрямлена вздовж осі Х і визначається виразом (3.4). Відносний рух є обертальним з кутовою швидкістю  і радіусом Ro (див. рис. 3.6, б):
і радіусом Ro (див. рис. 3.6, б):
r |
|
2 |
|
2 |
|
|
vцм = Ro |
ц |
+ ξ ψ . |
|
(3.31) |
||
Проекции относительной скорости |
|
Проекції |
відносної |
швидкості на |
||
на оси связанной системы координат: |
осі зв’язаної системи координат: |
|||||
vцмr |
= f7 (ϕ1)cos(ψ) |
; |
|
(3.32) |
||
|
x |
|
|
|
|
|
|
125 |
|
|
|
|
|

v |
r |
|
= f |
|
цм |
|
|||
|
y |
8 |
||
|
|
|
|
|
v |
r |
|
= − |
|
цм |
||||
|
|
|
z |
|
где
f |
|
( |
ϕ |
) |
= |
|
7 |
1 |
|
||
|
|
|
|
||
f |
( |
ϕ |
) |
= |
|
|
8 |
1 |
|
||
|
|
|
|
||
(ϕ1)cos(ψ) |
; |
|||||
Ro sin(ψ) |
|
|
, |
|||
|
де |
|
|
|
|
|
Ro cos(ϕr ); |
|
|||||
R |
|
( |
ϕ |
) |
; |
|
o |
sin |
|
|
|||
|
|
r |
|
|
|
|
(3.33)
(2.34)
ϕr |
– угол между проекцией скорости |
||
r |
на плоскость OXY и осью Х. |
|
|
vцм |
|
||
|
Множители в выражениях |
(3.32), |
|
(3.33), содержащие угол |
ϕr , |
можно |
|
определить по рис. 3.6, б с использованием (3.11)–(3.14):
ϕr – кут між проекцією швидкості vцмr
на площину OXY і віссю Х.
Множники у виразах (3.32), (3.33), що містять кут ϕr , можна визначити за рис. 3.6, б з використанням
(3.11)–(3.14):
cos
(
ϕ
r
)
= x
ξ цм′
;
sin
(
ϕr
)
= |
1− cos |
2 |
ϕ |
|
|||
|
|
|
r |
.
(3.35)
Максимальное опрокидывания ψmax
значение зависит от
угла |
Максимальне значення |
кута пере- |
поло- |
кидання ψmax залежить від |
положення |
жения центра масс при его движении в |
центра мас при його русі в площині |
|||
плоскости OXY (см. рис. 3.6): |
OXY (див. рис. 3.6): |
|
||
|
H0 |
|
|
|
ψmax = arctg |
|
, |
(3.36) |
|
|
|
|||
asin(ϕк ± ϕ1) |
|
|||
где |
ϕк |
b |
|
– конструктивное |
= arctg |
|
|||
|
|
a |
|
|
значение угла ϕ1; |
|
|
||
|
H0 |
– высота подъема подвижной |
||
опоры на полушаге.
Знак «+» в выражении (3.36) соответствует «передней» поднятой опоре, а «-» – «задней» по отношению к направлению движения.
де |
|
b |
– конструктивне зна- |
|
ϕк = arctg |
|
|||
|
|
a |
|
|
чення кута ϕ1; |
|
|
||
|
H0 |
– висота |
піднімання рухомої |
|
опори на півкроці.
Знак «+» у виразі (3.36) відповідає «передній» піднятій опорі, а «-» – «задній» відносно напрямку руху.
3.4. Нелинейная математическая |
3.4. Нелінійна математична модель |
модель движения робота |
руху робота по заданій траєкторії |
по заданной траектории |
|
Положение робота на траектории |
Положення робота на траєкторії |
можно определить, зная координаты можна визначити, знаючи координати
126
точки цели в стартовой системе коор- |
точки цілі у стартовій системі коорди- |
||
динат (СК), скорость движения центра |
нат (СК), швидкість руху центра мас у |
||
масс в связанной СК и взаимное распо- |
зв'язаній СК і взаємне розташування |
||
ложение |
неподвижных |
стартовой |
нерухомих стартової О0X0Y0, базової |
О0X0Y0, базовой О0X01Y01 и подвижной |
О0X01Y01 і рухомої зв'язаної ОXY сис- |
||
связанной ОXY систем координат, как |
тем координат, як показано на рис. 3.7. |
||
показано на рис. 3.7. |
|
|
|
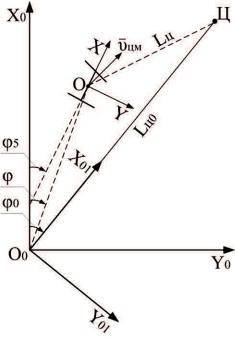
Рис. 3.7. Расположение точки цели Ц |
|
Рис. 3.7. Розташування точки цілі Ц ві- |
||||||
относительно стартовой О0X0Y0, |
|
дносно стартової О0X0Y0, базової |
||||||
базовой О0X01Y01 и связанной ОXY си- |
|
О0X01Y01 і зв’язаної ОXY систем |
||||||
стем координат |
|
|
|
|
координат |
|
||
Особенностью |
взаимного распо- |
Особливістю |
взаємного |
розташу- |
||||
ложения стартовой и базовой СК явля- |
вання стартової та базової СК є те, що |
|||||||
ется то, что их начала отсчета совпада- |
їх початки відліку збігаються, а вісь X01 |
|||||||
ют, а ось X01 базовой СК направлена к |
базової СК напрямлена до точки цілі Ц |
|||||||
точке цели Ц и отклонена от оси X0 |
і відхилена від осі X0 стартової СК на |
|||||||
стартовой СК на угол ϕ0 . |
|
|
кут ϕ0 . |
|
|
|
||
Компоненты |
вектора скорости |
Компоненти |
вектора |
швидкості |
||||
центра масс в стартовой СК можно |
центра мас у стартовій СК можна ви- |
|||||||
определить с использованием матрицы |
значити з використанням матриці на- |
|||||||
направляющих косинусов: |
|
|
прямних косинусів: |
|
||||
|
ν |
цм0 |
= Mсвν |
цм |
, |
|
(3.37) |
|
|
|
|
ст |
|
|
|
||
где νцм0 – вектор скорости центра масс |
де νцм0 – вектор швидкості центра мас |
|||||||
в стартовой СК; |
|
|
|
у стартовій СК; |
|
|
||
|
|
127 |
|
|
|
|
||
Mсв
ст
=
cos sin
(ϕ5 (ϕ5
) )
−sin(ϕ |
|
) |
5 |
|
|
cos(ϕ |
) |
|
5 |
|
|
− матрица перехода от связанной СК к стартовой
Аналогичным образом можно осуществить переход от стартовой СК к базовой:
– матриця переходу від зв’язаної СК до стартової.
Аналогічним чином можна здійснити перехід від стартової СК до базової:
ν
цм01
=
M
ст б
νцм0
,
(3.38)
где
ν
цм01
– вектор скорости центра
де
νцм01
– вектор швидкості центра мас
масс в базовой СК; |
|
|
у базовій СК; |
|||
cos(ϕ |
) |
−sin(ϕ |
) |
|||
Mбст = |
|
0 |
) |
0 |
|
|
|
sin(ϕ |
cos(ϕ ) |
|
|||
|
0 |
|
0 |
|
||
− матрица перехода от стартовой СК к |
|
– матриця переходу від стартової СК до |
||||
базовой. |
|
|
базової. |
|
|
|
С учетом (3.37), (3.38) матрицу пе- |
|
|
З урахуванням (3.37), (3.38) матри- |
|||
рехода от связанной СК к базовой за- |
|
цю переходу від зв’язаної СК до базової |
||||
пишем в виде |
|
|
запишемо у вигляді |
|||
=
|
|
|
|
|
|
M |
св |
= M |
ст |
M |
св |
|||||||
|
|
|
|
|
|
б |
б |
|
ст |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
cos |
( |
0 ) |
|
|
|
|
( |
5 ) |
|
|
|
|||||||
|
|
ϕ |
|
|
cos |
|
|
ϕ |
|
− sin |
||||||||
|
sin |
( |
|
0 ) |
cos |
( |
|
5 ) |
+ cos |
|||||||||
|
|
|
||||||||||||||||
|
|
|
ϕ |
|
|
|
ϕ |
|
||||||||||
|
cos(ϕ |
) |
||||
= |
sin(ϕ |
0 |
) |
|||
|
||||||
|
|
|
||||
( |
|
|
0 |
|
||
0 ) |
|
( |
|
5 |
||
( |
ϕ |
|
sin |
( |
ϕ |
|
0 ) |
|
|
5 |
|||
|
ϕ |
|
sin |
|
ϕ |
|
)
)
−sin(ϕ |
|
) cos |
(ϕ |
|
) |
||||||||||
|
|
|
0 |
|
|
|
|
|
|
5 |
|
|
|||
cos(ϕ |
|
) |
sin |
(ϕ |
) |
||||||||||
|
|
||||||||||||||
|
|
0 |
|
|
|
|
( |
5 |
|
|
|||||
|
|
( |
|
0 ) |
|
|
|
5 ) |
|
||||||
−cos |
|
|
ϕ |
|
|
sin |
|
|
ϕ |
|
− |
||||
|
( |
|
|
0 ) |
|
|
|
( |
|
5 ) |
|
|
|||
−sin |
|
|
ϕ |
|
sin |
|
|
ϕ |
|
+ |
|||||
−sin(ϕ |
|
|
) |
|||
|
|
5 |
|
|
||
cos(ϕ |
|
) |
||||
|
|
|||||
|
( |
5 |
|
|
||
sin |
0 ) |
cos |
||||
( |
ϕ |
|||||
cos |
0 ) |
cos |
||||
|
ϕ |
|||||
=
( |
5 |
( |
ϕ |
5 |
|
|
ϕ |
)
)
. (3.39)
Выражения |
(3.4), |
(3.5), |
Вирази (3.4), (3.5), (3.12) – (3.14), |
|
(3.12) − (3.14), (3.22), (3.29), (3.30) – |
(3.22), (3.29), (3.30) – (3.39) є неліній- |
|||
(3.39) представляют собой нелинейные |
ними рівняннями математичної моделі |
|||
уравнения математической модели про- |
просторового руху центра мас ОАК. |
|||
странственного движения центра масс |
|
|||
ОАУ. |
|
|
|
|
Тогда |
нелинейную математиче- |
Тоді нелінійну математичну мо- |
||
скую модель робота можно представить |
дель робота можна подати в такому ви- |
|||
в таком виде: |
|
|
гляді: |
|
1) критерий адекватности модели- |
1) критерій адекватності моделю- |
|||
рования и его численное значение, ко- |
вання та його числове значення, яке |
|||
торое может быть получено путем |
може бути отримане шляхом порівня- |
|||
сравнительного |
анализа |
результатов |
льного аналізу результатів натурних та |
|
натурных и вычислительных экспери- |
обчислювальних експериментів із за- |
|||
ментов с |
использованием |
машинной |
стосуванням машинної моделі; |
|
модели; |
|
|
|
|
2) номинальный режим функцио- |
2) номінальний режим функціону- |
|||
|
|
|
128 |
|
нирования, определяющий начальные |
вання, який визначає початкові умови |
условия (рабочая точка): |
(робоча точка): |
xцм01рт
=
0
;
yцм01рт
=
0
;
Mкррт
=
0
;
M
cΣрт
=
0
;
3) диапазон и характер изменения |
3) діапазон і характер змінення |
входного управляющего |
вхідного керувального |
M
кр
(
t
)
[
−0,08;
0,08]
,
Mкр
(
t
)
=
M |
|
( |
1 t |
||
|
кр |
|
)
и возмущающего |
і збурювального |
M
cΣ
(
t
)
[
0,001;0,02
]
Н·м,
McΣ
(
t
)
=
|
( |
M 1 t |
|
c |
|
)
воздействий, где 1(t) |
– единичная сту- |
пенчатая функция; 4) диапазон и характер изменения
выходных управляемых величин:
впливів, де 1(t) – одинична ступінчаста
функція; 4) діапазон і характер змінення ви-
хідних керованих величин:
xцм01
(
t
)
R,
yцм01
(
t
)
R;
5) оценочные значения параметров |
5) |
оцінні значення параметрів мо- |
модели; |
делі; |
|
6) математические уравнения, свя- |
6) |
математичні рівняння, які |
зывающие входные и выходные пере- |
зв’язують вхідні й вихідні змінні: |
|
менные: |
|
|
x |
a |
cos |
( |
ϕ |
) |
|
|
||||
|
|
|
|||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
−
sin |
( |
|
|
b/a |
|
ϕ1 2
)( |
− cos |
( |
1 |
|
|
− 1− cos |
||
ϕ |
) |
1 |
|
ϕ |
|
1 |
|
)
 1
1
;
ϕ5 |
= arcsin |
a |
(1− cos(ϕ1)) |
; |
5 |
|
|
|
|
sin |
1 |
|
|
|
1 ; |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
|
b |
|
|
|
|
b/a |
2 |
|
− 1 |
− cos |
ϕ1 |
||||
|
|
|
|
|
|
|
|
|
|||||||
|
K |
CD |
|
1 |
|
||
xцм′′ = |
|
|
yцм′ − yC + |
|
xцм′ + |
||
|
2 |
|
|
|
|||
|
K |
|
+1 |
KCD |
|
||
|
CD |
|
|||||
|
|
|
|
|
|
||
yцм′′ = yC + KCD (xцм′′ − xC );
K |
CD |
x |
C |
|
|
;
ξ =

 y
y
цм′
−
y
цм′′
2
+
x
цм′
−
x
цм′′
2
;
A ϕ |
1 |
2 |
|
1 |
|
2 |
2 1 1 |
|
|
2 |
|
( |
) |
1 |
4 |
1 |
ψ |
||||||
( |
1) |
|
|
|
|
|
|
||||
|
= Mкрf3 (ϕ1)− Mc2 − Mc3 − Mc4f3 (ϕ1); |
||||||||||
129

f1
(
f |
5 |
( |
ϕ |
|
|
1 |
ϕ |
) |
= |
1 |
|
|
)
a |
2 |
|
|
4 |
|
2f |
f |
( |
|
|
) |
|
|
( |
|
|
) |
|
|
зм |
||
A ϕ |
|
|
|
= f |
|
ϕ |
|
+ J |
z |
|||||
|
|
1 |
|
|
|
1 |
|
|
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
кр |
|
cos |
( |
ϕ |
) |
− |
sin |
||||||
|
|
|
||||||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
b
a
|
)Mкр |
+ PОАУξ |
(ϕ1); |
|
||||||||
|
|
|
||||||||||
|
|
пм |
|
пр |
|
|
|
|
|
|
||
+ Jz |
|
+ Jсп ; |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
ϕ |
|
)( |
|
− cos |
( |
ϕ |
)) |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
1 |
|
|
|
|
|
||||
|
1 |
|
|
|
|
|
1 |
|
|
|
+ |
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
− |
1 |
− cos |
|
ϕ |
|
|
|||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
2 (ϕ ) |
|
|
+Jкp |
|
|
|
|
1 |
|
; |
|
|
|
|
|
|
||
z |
b 2 |
− (1− cos(ϕ1)) |
|
|
|||
|
2 |
|
|||||
|
|
|
|
|
|
||
|
|
|
|
||||
|
a |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
ϕ |
) |
1− cos |
( |
ϕ |
) |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
a |
|
|
кр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
f |
|
(ϕ |
)= |
|
m |
cos(ϕ ) |
− |
|
|
|
|
|
1 |
|
( |
|
|
|
|
|
|
1 |
|
|
|
|
|
−sin( |
ϕ )− |
|
|
|
|||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 1− cos ϕ |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
(cos(ϕ1) − cos(2ϕ1)) |
− (1− cos |
(ϕ1))2 |
|
|
+ sin2 (ϕ1)(1− cos(ϕ1))2 |
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− (1− cos(ϕ1)) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
2 |
|
|
|
(1− cos(ϕ1))2 |
|
|
|
|
|
|
(ϕ1)(1− cos(ϕ1)) |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
cos(ϕ1) |
|
− |
|
|
+ sin2 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
+2Jкр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin(ϕ |
); |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
− (1− cos(ϕ1)) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f3 (ϕ1)=1− |
|
|
|
|
|
|
|
|
sin(ϕ1) |
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
b 2 |
− 1− cos ϕ1 |
2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
(ϕ |
)= ξ |
∂ξ |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
∂ϕ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
130 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||