

Методы моделирования объектов автоматического управления
.pdff5
(
ϕ1
)
=
m |
R |
2 |
|
o |
|||
ОАУ |
|
;
f
6
(
ϕ1
)
=
2H |
цм |
|
|
a |
|
π |
|
cos |
|
|
2 |
− arcsin
a b
(1
−
cos
(
ϕ1
)
)
;
vцм =
vцмr y
vцмe
= f8
+ vцмr ;
(ϕ1)cos
vцмr (ψ)
= R |
|
|
2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o |
|
|
|
|
|
ц |
|
|
|
|
|
|
|
r |
= −Ro |
|||||
; vцм |
||||||
|
|
z |
||||
+ ξ
sin |
( |
|
ψ |
r |
|
|
; vцм |
|
||
|
|
x |
|
ψ) |
; |
f7 |
( |
= f7
ϕ |
) |
1 |
|
(ϕ1 = R
)
o
( |
ψ |
) |
|
cos |
|
||
cos |
|
ϕ |
|
( |
|
r |
|
|
|
|
|
 ;
;
);
f8
(
ϕ1
)
=
R |
o |
sin |
( |
||
|
|||||
|
|
|
|
|
|
ψ |
max |
= |
|||
|
|
|
|||
ϕr );
arctg
cos(ϕ |
|||
|
|
r |
|
|
|
|
|
|
asin |
( |
|
|
|||
|
|||
|
|
||
)=
H0 ϕк
ξ xцм′
± ϕ |
) |
1 |
|
; |
sin( |
|
; ϕк |
|
|
|
|
ϕr )= 
 1−
1−
= arctg ba
cos2 ϕ |
r |
; |
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
ν
цм0
=
M
св ст
νцм
;
νцм01
=
M |
ст |
ν |
|
|
б |
цм0 |
|||
|
|
;
Mсв
б
=MстMсв
бст
=
cos sin
(ϕ0 (ϕ0
) )
−sin(ϕ |
|
) |
0 |
|
|
cos(ϕ |
) |
|
0 |
|
|
cos sin
(ϕ5 (ϕ5
) )
−sin(ϕ |
|
) |
5 |
|
|
cos(ϕ |
) |
|
5 |
|
|
=
cos |
( |
0 ) |
|
|
( |
5 ) |
|
( |
0 ) |
|
( |
5 ) |
|||||
|
|
ϕ |
|
cos |
|
|
ϕ |
− sin |
|
ϕ |
sin |
|
ϕ |
||||
= |
sin |
( |
|
0 ) |
cos |
( |
|
5 ) |
+ cos |
( |
0 ) |
sin |
( |
5 ) |
|||
|
|
|
|||||||||||||||
|
|
|
ϕ |
|
|
ϕ |
|
ϕ |
|
ϕ |
|||||||
7) диапазон и масштаб изменения |
|||||||||||||||||
времени: |
tT |
, mt |
|
=1. |
|
|
|
|
|
|
|||||||
|
|
( |
0 ) |
|
|
( |
5 ) |
|
( |
0 ) |
( |
5 ) |
|
; |
|||
−cos |
|
|
ϕ |
|
sin |
|
|
ϕ |
− sin |
( |
ϕ |
cos |
ϕ |
|
|
||
|
( |
|
0 ) |
|
|
( |
|
5 ) |
|
0 ) |
( |
5 ) |
|
||||
−sin |
|
|
ϕ |
sin |
|
|
ϕ |
+ cos |
|
ϕ |
cos |
ϕ |
|
|
|||
7) діапазон і масштаб змінення часу: tT, mt =1.
131
Глава 4 ЛИНЕАРИЗОВАННАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
ШАГАЮЩЕГО РОБОТА «ANI» Розділ 4
ЛІНЕАРИЗОВАНА МАТЕМАТИЧНА МОДЕЛЬ КРОКУЮЧОГО РОБОТА «ANI»
Книга природы написана на языке |
Книга природи написана мовою |
||||
|
математики. |
|
математики. |
||
Галилео Галилей (1564–1642), |
Галілео Галілей (1564–1642), |
||||
итальянский физик и астроном |
італійський фізик і астроном |
||||
Нелинейная |
математическая мо- |
Нелінійна |
математична |
модель |
|
дель шагающего робота как объекта |
крокуючого робота як об'єкта керуван- |
||||
управления не позволяет конструктив- |
ня не дає змоги конструктивно сформу- |
||||
но сформировать математическую мо- |
вати математичну модель ОАК. Для то- |
||||
дель ОАУ. Для того чтобы воспользо- |
го щоб скористатися класичними засо- |
||||
ваться классическими средствами тео- |
бами теорії автоматичного керування, |
||||
рии автоматического управления, не- |
нелінійні математичні моделі лінеари- |
||||
линейные математические модели ли- |
зують. У цьому розділі описано особ- |
||||
неаризуют. В этой главе описаны осо- |
ливості графічної та аналітичної лінеа- |
||||
бенности графической и аналитической |
ризації нелінійностей моделі крокуючо- |
||||
линеаризации нелинейностей |
модели |
го робота «ANI», а також особливості |
|||
шагающего робота «ANI», а также осо- |
формування лінеаризованих інтерваль- |
||||
бенности формирования линеаризован- |
них математичних моделей робота, що |
||||
ных интервальных математических мо- |
відображають його малі кутові й посту- |
||||
делей робота, отражающих его малые |
пальні рухи. |
|
|
||
угловые и поступательные движения. |
|
|
|
||
4.1. Графоаналитическая |
4.1. Графоаналітична |
||||
линеаризация статических |
лінеаризація статичних |
||||
нелинейностей |
|
нелінейностей |
|
||
Выражения |
(3.4), |
(3.5), |
Вирази (3.4), (3.5), (3.12)–(3.14), |
||
(3.12)–(3.14), (3.22), (3.29), (3.30)–(3.39) |
(3.22), (3.29), (3.30)–(3.39) є нелінійни- |
||||
представляют собой нелинейные алгеб- |
ми алгебричними й неоднорідними ди- |
||||
раические и неоднородные дифферен- |
ференціальними |
рівняннями |
другого |
||
циальные уравнения второго |
порядка. |
порядку. Аналізувати динамічні влас- |
|||
Анализировать динамические свойства |
тивості робота як ОАК і синтезувати |
||||
робота как ОАУ и синтезировать зако- |
закони керування рухом на основі ана- |
||||
ны управления движением на основе |
літичного розв’язання системи неліній- |
||||
аналитического решения системы не- |
них рівнянь доволі важко, і це |
обумов- |
|||
линейных уравнений довольно трудно, |
лює необхідність вирішення |
завдання |
|||
132
и это |
обуславливает |
необходимость |
лінеаризації нелінійної моделі робота. |
||||||
решения задачи линеаризации нели- |
|
|
|
||||||
нейной модели робота. |
|
|
|
|
|
|
|||
Выбор метода линеаризации осу- |
Вибір методу лінеаризації здійс- |
||||||||
ществляется исходя из задачи, которую |
нюється виходячи з завдання, яке має |
||||||||
должна решать система автоматическо- |
вирішувати система автоматичного ке- |
||||||||
го управления. САУ «ANI» предназна- |
рування (САК). САК «ANI» призначена |
||||||||
чена для обеспечения устойчивости и |
для забезпечення стійкості й необхід- |
||||||||
требуемых показателей качества дви- |
них показників якості руху центра мас |
||||||||
жения центра масс робота по заданной |
робота за заданою траєкторією. Така |
||||||||
траектории. |
Такая |
система, |
которую |
система, яку можна віднести до класу |
|||||
можно отнести к классу систем автома- |
систем автоматичного позиціонування, |
||||||||
тического позиционирования, имеет не- |
має кілька особливостей: |
||||||||
сколько особенностей: |
|
|
|
|
|
|
|||
1) положение центра масс робота |
1) положення центра мас робота |
||||||||
относительно точки цели в каждый мо- |
відносно точки цілі в кожний момент |
||||||||
мент времени характеризуется неопре- |
часу характеризується невизначеністю, |
||||||||
деленностью, что |
обусловлено двумя |
що обумовлено двома основними фак- |
|||||||
основными факторами: |
|
|
|
торами: |
|
||||
а ) возможностью проскальзывания |
а) можливістю проковзування між |
||||||||
между |
конечностями |
и |
поверхностью |
кінцівками й поверхнею руху, що зале- |
|||||
движения, что зависит от рельефа по- |
жить від рельєфу поверхні, її шорсткос- |
||||||||
верхности, её шероховатости и матери- |
ті й матеріалу, з якого виготовлено кін- |
||||||||
ала, из которого изготовлены конечнос- |
цівки; |
|
|||||||
ти; |
|
|
|
|
|
|
|
|
|
б) использованием видеокамеры в |
б) |
використанням відеокамери як |
|||||||
качестве датчика взаимного положения |
датчика взаємного положення крокую- |
||||||||
шагающего робота и цели, точность ко- |
чого робота й цілі, точність якого зале- |
||||||||
торого зависит от оптических свойств |
жить від оптичних властивостей атмос- |
||||||||
атмосферы и уровня освещенности; |
фери й рівня освітленості; |
||||||||
2) |
линеаризованная |
математиче- |
2) лінеаризована математична мо- |
||||||
ская модель подобной системы должна |
дель подібної системи має описувати |
||||||||
описывать |
основные |
|
динамические |
основні динамічні властивості робота у |
|||||
свойства робота во всем практическом |
всьому практичному діапазоні змінення |
||||||||
диапазоне изменения обобщенных ко- |
узагальнених координат (кутів ϕ1 і ψ |
||||||||
ординат (углов ϕ |
и |
ψ |
на |
рис. 3.6) |
на рис. 3.6) адекватно фізичному про- |
||||
|
|
1 |
|
|
|
|
|||
адекватно физическому процессу дви- |
цесу руху. |
||||||||
жения. |
|
|
|
|
|
|
|
|
|
Учитывать неопределенность со- |
Ураховувати невизначеність стану |
||||||||
стояния ОАУ в линеаризованной мате- |
ОАК |
в |
лінеаризованій математичній |
||||||
матической модели целесообразно при |
моделі доцільно при переході до інтер- |
||||||||
переходе к интервальным значениям её |
вальних значень її параметрів. Межі ін- |
||||||||
параметров. Границы интервалов могут |
тервалів можуть бути визначені шля- |
||||||||
быть определены |
путем |
комплексной |
хом |
комплексної лінеаризації статич- |
|||||
133

линеаризации статических и динамиче- |
них і динамічних нелінійностей у поча- |
|||||||||||||||||||||
ских нелинейностей в исходных нели- |
ткових нелінійних рівняннях. |
|
|
|||||||||||||||||||
нейных уравнениях. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Статические нелинейности в нели- |
|
Статичні нелінійності в нелінійній |
||||||||||||||||||
нейной модели представлены функция- |
моделі |
|
подано |
функціями |
A(ϕ ) |
, |
||||||||||||||||
|
|
A(ϕ1), |
|
(ϕ1), |
f3 (ϕ1), |
|
(ϕ1), |
|
1 |
|||||||||||||
ми |
f2 |
f4 |
f2 |
(ϕ1) |
, |
f3 |
(ϕ1) |
, |
f4 ( |
ϕ1), |
f5 (ϕ1), f6 (ϕ1), |
|||||||||||
|
(ϕ1), |
|
(ϕ1), |
f7 (ϕ1), f8 (ϕ1) |
, fv (ϕ1) |
|||||||||||||||||
f5 |
f6 |
f7 |
(ϕ1) |
, |
f8 |
(ϕ1) |
, |
fv ( |
ϕ1) |
і ξ |
(ϕ1), форма- |
|||||||||||
|
ξ |
(ϕ |
), |
|
|
|
|
|
|
|
||||||||||||
и |
формальный |
вид |
которых |
льний вигляд яких визначається геоме- |
||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
||||||||||||
определяется геометрическими особен- |
тричними |
особливостями |
механічної |
|||||||||||||||||||
ностями механической части ОАУ. Вы- |
частини ОАК. Вирази цих функцій да- |
|||||||||||||||||||||
ражения этих функций позволяют ана- |
ють змогу аналітично визначити їх по- |
|||||||||||||||||||||
литически определить их производные |
хідні за узагальненою координатою ϕ1 |
, |
||||||||||||||||||||
по обобщенной координате ϕ1 , а гра- |
а графічним способом – найбільші й |
|||||||||||||||||||||
фическим способом – наибольшие и |
найменші значення похідних у всьому |
|||||||||||||||||||||
наименьшие значения производных во |
робочому діапазоні, а також діапазони |
|||||||||||||||||||||
всем рабочем диапазоне, а также диапа- |
лінеаризації в точках графіків функцій, |
|||||||||||||||||||||
зоны линеаризации в точках графиков |
які відповідають цим значенням. |
|
||||||||||||||||||||
функций, соответствующих этим зна- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
чениям. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Диапазоны |
линеаризации, |
ограни- |
|
Діапазони лінеаризації, що обме- |
||||||||||||||||
чивающие |
|
касательные |
указанных |
жують |
|
дотичні |
зазначених |
функцій, |
||||||||||||||
функций, устанавливаются на основа- |
установлюються на основі максимально |
|||||||||||||||||||||
нии |
максимальной |
допустимой |
по- |
допустимої |
|
|
|
|
|
похибки |
||||||||||||
грешности
δ |
max |
= |
|
|
max |
100 |
|
y |
||
|
||
max |
|
%
,
где
δ |
max |
= |
|
|
max |
100 |
|
y |
||
|
||
max |
|
%
, де
max
– макси-
max
− максимальная абсолютная помальна абсолютна похибка, а
ymax
–
грешность, а |
y |
max |
– весь |
диапазон |
весь діапазон змінення |
досліджуваної |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
функції. Значення |
|
|
визначається |
||||||
изменения исследуемой функции. Зна- |
max |
|||||||||||||||||||
чение |
max |
определяется |
величиной |
величиною |
максимально |
допустимої |
||||||||||||||
максимальной |
допустимой |
погрешно- |
похибки δmax = 5 %. |
|
|
|
|
|
||||||||||||
сти |
δmax |
= 5 %. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Вид |
функций |
A(ϕ1) |
, |
f2 |
( |
ϕ1), |
|
Вигляд |
функцій |
A( |
ϕ1), |
f2 |
(ϕ1), |
|||||
f3 |
(ϕ1), |
f4 ( |
ϕ1), |
f5 (ϕ1), |
|
f6 |
( |
ϕ1), |
f3 |
(ϕ1), f4 (ϕ1), |
f5 (ϕ1), |
f6 |
(ϕ1), |
f7 |
(ϕ1), |
|||||
f7 |
(ϕ1), |
f8 (ϕ1), fv (ϕ1), |
ξ(ϕ1) |
и |
их |
f8 |
(ϕ1), fv (ϕ1), |
ξ(ϕ1) |
та їх похідних |
|||||||||||
производных при изменении обобщен- |
при зміненні узагальненої координати в |
|||||||||||||||||||
ной |
координаты |
в |
|
|
диапазоне |
діапазоні ϕ = 0...60 |
а також результа- |
|||||||||||||
ϕ1 = 0...60 , а также результаты графо- |
|
1 |
|
|
|
|
|
|
|
|||||||||||
ти графоаналітичної лінеаризації зо- |
||||||||||||||||||||
аналитической линеаризации представ- |
бражено на рис. 4.1–4.11. |
|
|
|
||||||||||||||||
лены на рис. 4.1–4.11. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
134

а
б
Рис. 4.1. Функция A(ϕ1):
a – графическая линеаризация;
dA
б – график производной dϕ1
Атрибуты линеаризации графика функции A = A(ϕ1):
1) максимальная погрешность линеаризации:
Рис. 4.1. Функція A(ϕ1): a – графічна лінеаризація;
dA
б – графік похідної dϕ1
Атрибути лінеаризації графіка функції A = A(ϕ1):
1) максимальна похибка лінеаризації:
δ
max
=
max Amax
100 % = 5%;
2) |
координаты рабочих точек: |
|
|
р.т.: {0; 4,53 10 |
−3 |
|
} |
|
|
|
1 |
3) |
диапазон линеаризации по |
|
обобщенной координате:
2)координати робочих точок:
;р.т.: {1,05; 4,35 10−3}2;
3)діапазон лінеаризації за узагальненою координатою:
Δϕ1max =1,05 рад;
135
4) диапазон линеаризации по зна- |
4) діапазон лінеаризації за значен- |
чениям функции: |
нями функції: |
A |
max |
= 510 |
−4 |
|
|||
|
|
|
5) коэффициент пропорционально-
сти:
кг·м2;
5) коефіцієнт пропорційності:
K |
A |
= |
|
|
A |
= −2,6510 |
−4 |
; 0 |
ϕ |
|
||
|
|
|
|
1 |
|
|
|
кг·м2/рад;
6) линеаризованное уравнение: |
6) лінеаризоване рівняння: |
7) масштаб времени:
mt
=
1
.
A = KA
ϕ1 |
; |
7) масштаб часу:
m
t
=
1
.
а
|
|
|
б |
|
|
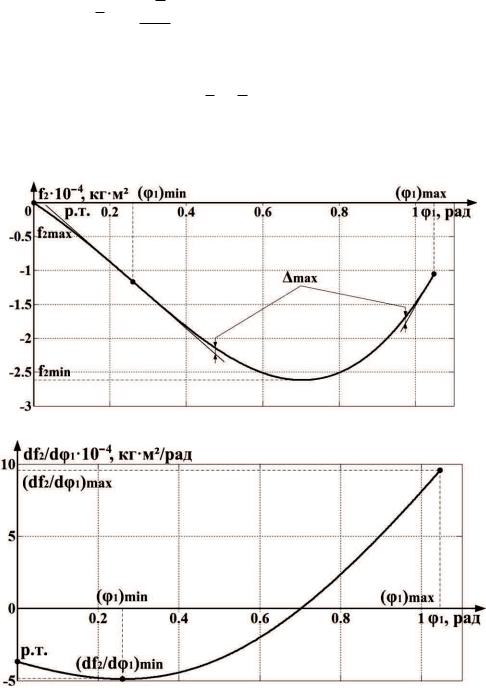
Рис. 4.2. Функция f2 (ϕ1): |
Рис. 4.2. Функція f2 (ϕ1): |
||||
a – графическая линеаризация; |
a – графічна лінеаризація; |
||||
б – график производной |
df2 |
|
б – графік похідної |
df2 |
|
dϕ |
|
dϕ |
|||
1 |
|
|
1 |
|
|
136

Атрибуты функции f2 = f2
линеаризации графика |
Атрибути лінеаризації графіка фу- |
(ϕ1): |
нкції f2 = f2 (ϕ1): |
1) максимальная погрешность ли- |
1) максимальна похибка лінеари- |
неаризации: |
зації: |
δ |
max |
= |
max |
100 % |
|
f |
|||||
|
|
|
|||
|
|
|
|
||
|
|
|
2max |
|
=
5%
;
2) координаты рабочих точек:
р.т.: {0; 0} |
; р.т.: |
1 |
|
2) координати робочих точок:
{1,05; −1,0510 |
−4 |
} |
; |
|
|||
|
|
2 |
|
3) диапазон линеаризации по |
3) діапазон лінеаризації за узагаль- |
обобщенной координате: |
неною координатою: |
Δϕ1max
=1,05
рад;
4) диапазон линеаризации по зна- |
4) діапазон лінеаризації за значен- |
чениям функции: |
нями функції: |
f
2max
=
2,6
10
−4
кг·м2;
5) коэффициент пропорционально- |
5) коефіцієнт пропорційності: |
сти:
K |
f |
= |
|
2 |
|
f2 |
= −4,8 10 |
−4 |
;9,6 |
10 |
−4 |
|
ϕ |
|
|
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
кг·м2/рад;
6) линеаризованное уравнение: |
6) лінеаризоване рівняння: |
f |
= K |
f |
2 |
|
|
|
|
2 |
7) масштаб времени: mt =1.
ϕ1; |
7) масштаб часу: mt =1. |
Атрибуты линеаризации графика |
Атрибути лінеаризації графіка |
||||
функции f3 = f3 (ϕ1): |
|
|
|
функції f3 = f3 (ϕ1): |
|
1) |
максимальная погрешность ли- |
1) максимальна похибка лінеари- |
|||
неаризации: |
|
|
|
зації: |
|
|
δ |
max |
= |
max |
100 % = 5%; |
|
f3max |
||||
|
|
|
|
||
|
|
|
|
|
|
2) |
координаты рабочих точек: |
2) координати робочих точок: |
|||
р.т.:
{ |
} |
|
0;1 |
1 |
|
|
|
|
; р.т.:
{1,05;
} |
|
0,395 |
2 |
|
|
;
137

а
б
Рис. 4.3. Функция f3 |
(ϕ1): |
a – графическая линеаризация;
б – график производной df3 dϕ1
3) диапазон линеаризации по обобщенной координате:
Рис. 4.3. Функція f3 |
(ϕ1): |
a – графічна лінеаризація;
б – графік похідної df3 dϕ1
3) діапазон лінеаризації за узагальненою координатою:
|
Δϕ1max =1,05 рад; |
||
4) |
диапазон линеаризации по зна- |
4) |
діапазон лінеаризації за значен- |
чениям функции: |
нями функції: |
||
|
f3max = 0,59; |
|
|
5) |
коэффициент пропорциональности: |
5) |
коефіцієнт пропорційності: |
|
138 |
|
|

K |
f |
= |
|
3 |
|
f3 ϕ1
=
[
−0,66;
−
0,48
]
рад |
−1 |
|
;
6) линеаризованное уравнение:
f3
=
K
f3
6) лінеаризоване рівняння:
ϕ1 |
; |
7) масштаб времени: mt =1.
Рис. 4.4. Функция f4 (ϕ1): a – графическая линеаризация;
б – график производной df4 dϕ1
Атрибуты линеаризации графика функции f4 = f4 (ϕ1):
1) максимальная погрешность линеаризации:
7) масштаб часу: mt =1.
а
б
Рис. 4.4. Функція f4 (ϕ1): a – графічна лінеаризація;
б – графік похідної df4 dϕ1
Атрибути лінеаризації графіка функції f4 = f4 (ϕ1):
1) максимальна похибка лінеаризації:
139
δ |
max |
= |
max |
|
f |
||||
|
|
|||
|
|
|
||
|
|
|
4max |
100 %
=
5%
;
2) координаты рабочих точек: |
2) координати робочих точок: |
р.т.:
{ |
} |
|
0;1 |
1 |
|
|
|
|
; р.т.:
{1,05;
} |
|
0,395 |
2 |
|
|
;
3) диапазон линеаризации по обобщенной координате:
Δϕ1max
4) диапазон линеаризации по значениям функции:
=
3) діапазон лінеаризації за узагальненою координатою:
1,05 рад;
4) діапазон лінеаризації за значеннями функції:
f
4max
=
7,3
10
−4
м2/рад;
5) коэффициент пропорциональности: |
5) коефіцієнт пропорційності: |
K |
f |
= |
|
4 |
|
f |
= −2 10 |
−3 |
;2,1 10 |
−3 |
|
4 |
|||||
ϕ |
|
|
|||
|
|
|
|
|
|
1 |
|
|
|
|
|
м2/рад2;
6) линеаризованное уравнение: |
6) лінеаризоване рівняння: |
7) масштаб времени:
m
t
=
1
.
f4
=
K
f
4
ϕ1 |
; |
7) масштаб часу:
m
t
=
1
.
Атрибуты линеаризации графика
функции f5 = f5 |
(ϕ1): |
1) максимальная погрешность линеаризации:
Атрибути лінеаризації графіка фу-
нкції f5 = f5 |
(ϕ1): |
1) максимальна похибка лінеаризації:
δ |
max |
= |
max |
100 % |
|
f |
|||||
|
|
|
|||
|
|
|
|
||
|
|
|
5max |
|
=
5%
;
2) |
координаты рабочих точек: |
|
|
|
р.т.: {0; 4,4 10 |
−3 |
} |
|
|
||
|
|
|
1 |
3) |
диапазон линеаризации по |
|
|
обобщенной координате:
2) координати робочих точок:
; р.т.: {1,05; 5,16 10 |
−3 |
; |
} |
||
|
2 |
|
3) діапазон лінеаризації за узагальненою координатою:
Δϕ1max
=1,05
рад;
4) диапазон линеаризации по зна- |
4) діапазон лінеаризації за значен- |
чениям функции: |
нями функції: |
f5max = 7,8 10−4 м2;
140