

Методы моделирования объектов автоматического управления
.pdf
|
Для построения полной содержа- |
Для побудови повної змістовної |
|||||
тельной модели |
шагающего робота |
моделі крокуючого робота «ANI» необ- |
|||||
«ANI» необходимо знать некоторые па- |
хідно знати деякі параметри й характе- |
||||||
раметры и характеристики объекта и |
ристики об'єкта та його окремих функ- |
||||||
его отдельных функциональных эле- |
ціональних елементів. У табл. 3.2 наве- |
||||||
ментов. В табл. 3.2 приведены основ- |
дено основні характеристики стандарт- |
||||||
ные характеристики стандартных сер- |
них сервоприводів TowerPro MG995. |
||||||
воприводов TowerPro MG995. |
|
|
|
||||
|
|
|
|
|
|
Таблица 3.2 |
|
|
|
|
|
|
|
Таблиця 3.2 |
|
|
№ |
|
Параметр |
|
Значение |
Единица измерения |
|
|
п/п |
|
Параметр |
|
Значення |
Одиниця виміру |
|
|
1 |
Вид модуляции |
|
Аналоговая |
– |
|
|
|
Вид модуляції |
|
Аналогова |
|
|
||
|
|
|
|
|
|||
|
2 |
Крутящий момент |
|
10,00 (4,8 В) |
кг∙см |
|
|
|
Крутний момент |
|
|
|
|
||
|
|
|
|
|
|
||
|
3 |
Скорость вращения |
|
0,20 |
c/60° |
|
|
|
Швидкість обертання |
|
|
|
|
||
|
|
|
|
|
|
||
|
4 |
|
Масса |
|
55 |
г |
|
|
|
Маса |
|
|
г |
|
|
|
|
|
|
|
|
||
|
|
|
Размеры: |
|
40,6×19,8×42,9 |
мм |
|
|
5 |
длина×ширина×высота |
|
|
|
|
|
|
|
Розміри: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
довжина×ширина×висота |
|
|
|
|
|
|
6 |
Угол вращения |
|
180 |
град |
|
|
|
Кут обертання |
|
|
|
|
||
|
|
|
|
|
|
||
|
7 |
Ширина импульса |
|
1000…2000 |
мкс |
|
|
|
Ширина імпульсу |
|
|
|
|
||
|
|
|
|
|
|
||
|
В табл. 3.3 |
приведены основные |
У табл. 3.3 наведено основні хара- |
||||
характеристики аналогового сервомо- |
ктеристики аналогового |
сервомотора |
|
тора SpringRC SR402P. |
SpringRC SR402P. |
|
|
Спецификация веб-камеры для об- |
Специфікація веб-камери для об- |
||
мена сообщениями FaceCam 1320: |
міну повідомленнями FaceCam 1320: |
||
а) требования к вычислительной |
а) вимоги до обчислювальної сис- |
||
теми: процесор Pentium 4 2.4 GHz або |
|||
системе: процессор Pentium 4 2.4 GHz |
|||
или AMD; ОС Windows 7/Vista/XP SP2; |
AMD; ОС Windows 7/Vista/XP SP2; |
||
б) матриця 1.3 МП; |
|
||
б) матрица 1.3 МП; |
|
||
в) роздільність відео: 1280x1024 |
|||
|
|||
в) разрешение видео: 1280x1024 |
пікселів. |
|
|
пикселей. |
|
|
|
На выходе блока питания получаем |
На виході блока живлення маємо |
||
выходное напряжение 9 В, максималь |
вихідну напругу 9 В, |
максимальний |
|
111
ный ток 2 А. |
|
|
струм 2 А. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.3 |
||
|
|
|
|
|
|
|
|
|
|
|
Таблиця 3.3 |
||
|
№ |
|
|
Параметр |
Значение |
|
Единица измерения |
|
|||||
|
п/п |
|
Параметр |
Значення |
|
Одиниця виміру |
|
||||||
|
1 |
|
Момент остановленного вала |
8,2 (6,0 В) |
|
|
кг∙см |
|
|||||
|
|
|
|
Момент зупиненого вала |
9,6 (7,4 В) |
|
|
кг∙см |
|
||||
|
2 |
|
|
Масса |
57 |
|
|
|
г |
|
|||
|
|
|
|
|
Маса |
|
|
|
|
г |
|
||
|
3 |
|
|
Размеры: |
40,2×20,8×41,5 |
|
мм |
|
|||||
|
|
|
|
длина×ширина×высота |
|
|
|
|
|
|
|
||
|
|
|
|
|
Розміри: |
|
|
|
|
|
|
|
|
|
|
|
|
довжина×ширина×висота |
|
|
|
|
|
|
|
||
|
4 |
|
Напряжение питания |
6,0...7,4 |
|
|
В |
|
|||||
|
|
|
|
|
Напруга живлення |
|
|
|
|
|
|
|
|
|
5 |
|
Ток: |
|
|
0,43 (6,0 В) |
|
|
А |
|
|||
|
|
|
|
− без нагрузки |
1,0 (6,0 В) |
|
|
|
|
|
|||
|
|
|
|
− при полной нагрузке |
|
|
|
|
|
|
|
||
|
|
|
|
Струм: |
|
|
|
|
|
|
|
||
|
|
|
|
− без навантаження |
|
|
|
|
|
|
|
||
|
|
|
|
− при повному навантаженні |
|
|
|
|
|
|
|
||
|
6 |
|
|
Угол вращения |
180 |
|
|
град |
|
||||
|
|
|
|
|
Кут обертання |
|
|
|
|
|
|
|
|
|
|
Основные |
параметры регуляторов |
Основні |
параметри регуляторів |
||||||||
напряжения для питания сервоприводов |
напруги для |
живлення |
сервоприводів |
||||||||||
приведены в табл. 3.4. |
наведено в табл. 3.4. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.4 |
||
|
|
|
|
|
|
|
|
|
|
|
Таблиця 3.4 |
||
№ |
|
|
|
Параметр |
|
Значение |
|
Единица измерения |
|
||||
п/п |
|
|
|
Параметр |
|
Значення |
|
Одиниця виміру |
|
||||
1 |
|
|
|
Выходной ток |
|
до 1,5 |
|
|
А |
|
|
|
|
|
|
|
|
Вихідний струм |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
5; 6; 8; |
|
|
|
|
|
|
|
|
|
|
|
Выходное напряжение |
|
8,5; 9; |
|
|
В |
|
|
|
|
|
|
|
|
Вихідна напруга |
|
12; 15; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
18; 24 |
|
|
|
|
|
|
3 |
|
Защита от тепловой перегрузки |
|
есть |
|
|
– |
|
|
|
|||
|
|
|
Захист від теплового переванта- |
|
є |
|
|
|
|
|
|
||
|
|
|
|
|
ження |
|
|
|
|
|
|
|
|
4 |
Защита от короткого замыкания |
|
есть |
|
|
– |
|
|
|
||||
|
|
|
Захист від короткого замикання |
|
є |
|
|
|
|
|
|
||
|
|
|
|
|
112 |
|
|
|
|
|
|
||
Полученная |
содержательная мо- |
Отримана змістовна модель да- |
||||
дель позволила |
определить принцип |
ла змогу визначити принцип дії та |
||||
действия и устройство ОАУ. Однако |
будову ОАК. Однак для досягнення |
|||||
для достижения цели моделирования |
мети моделювання такої інформації |
|||||
такой информации недостаточно, так |
недостатньо, оскільки цей вид моде- |
|||||
как данный вид моделей не раскрыва- |
лей не розкриває особливостей кіне- |
|||||
ет особенностей кинематики движе- |
матики руху й не дає змоги отримати |
|||||
ния и не позволяет получить количе- |
кількісні оцінки динамічних власти- |
|||||
ственные |
оценки |
динамических |
востей ОАК. Це, у свою чергу, приз- |
|||
свойств ОАУ. Это, в свою очередь, |
водить до необхідності побудови ве- |
|||||
приводит к необходимости построе- |
ликої кількості графічних моделей |
|||||
ния ряда графических моделей объек- |
об'єкта моделювання. |
|||||
та моделирования. |
|
|
|
|||
3.2. Физическая модель |
3.2. Фізична модель |
|||||
|
|
шагающего робота |
|
крокуючого робота |
||
На |
рис. 3.4 |
изображена |
укруп- |
На рис. 3.4 зображено укрупне- |
||
ненная |
физическая |
модель |
объекта |
ну фізичну модель об’єкта автомати- |
||
автоматического управления. |
|
чного керування. |
||||
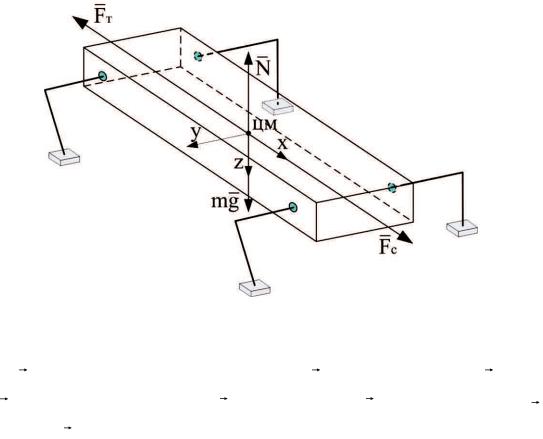
Рис. 3.4. Физическая модель ОАУ |
Рис. 3.4. Фізична модель ОАК |
Силы, действующие на ОАУ, – это |
Сили, що діють на ОАК, – це сила |
сила тяги
Т
, сила сопротивления двитяги
Т
, сила опору руху
C
, сила реа-
жению
C
, сила реакции опоры
N
и
кції опори
N
і сила тяжіння mg . Під-
сила тяжести mg . Результирующая сисумкова сила є сумою сил, що діють на ла есть сумма сил, действующих на об’єкт.
объект.
113

Сила сопротивления
C
складыва-
Сила опору
F C
складається з сили
ется из силы сопротивления среды, си- |
опору середовища, сили тертя між опо- |
|||||||
лы трения между опорами и поверхно- |
рами й поверхнею, якою рухається |
|||||||
стью, по которой движется объект, и |
об’єкт, і сил тертя в шарнірах. |
|
||||||
сил трения в шарнирах. |
|
|
|
|
|
|||
На рис. 3.5 изображена кинемати- |
На рис. 3.5 зображено кінематичну |
|||||||
ческая схема шагающего робота «ANI». |
схему крокуючого робота «ANI». Ме- |
|||||||
Механическая часть ОАУ представляет |
ханічна частина ОАК являє собою сім |
|||||||
собой семь |
шарнирно соединенных |
шарнірно з'єднаних ланок: корпус, тя- |
||||||
звеньев: корпус, ведущий мост, ведо- |
говий міст, ведений міст і чотири опо- |
|||||||
мый мост и четыре опоры. Звенья ме- |
ри. Ланки механізму здійснюють прос- |
|||||||
ханизма совершают |
пространственные |
торові рухи, що приводять до перемі- |
||||||
движения, приводящие к перемещению |
щення центра мас. Ці рухи можна поді- |
|||||||
центра масс. Эти движения можно раз- |
лити на цикли (повні кроки), кожний |
|||||||
делить на циклы (полные шаги), каж- |
цикл складається з двох напівкроків, |
|||||||
дый цикл состоит из двух полушагов, |
суть яких полягає в спільному кутовому |
|||||||
суть которых заключается в совмест- |
русі мостів з двома піднятими опорами. |
|||||||
ном угловом движении мостов с двумя |
У свою чергу, корпус, з'єднаний з мос- |
|||||||
поднятыми опорами. В свою очередь, |
тами, здійснює складний переносний |
|||||||
корпус, соединенный с мостами, со- |
рух. |
|
|
|||||
вершает сложное переносное движение. |
|
|
|
|||||
Учитывая |
особенности |
кинемати- |
Ураховуючи |
особливості |
кінема- |
|||
ки, это сложное движение центра масс, |
тики, цей складний рух центра мас, |
|||||||
расположенного |
на |
корпусе, |
можно |
розташованого на корпусі, можна по- |
||||
представить в виде двух движений: пе- |
дати у вигляді двох рухів: переносно- |
|||||||
реносного движения в плоскости OX0Y0 |
го руху в площині OX0Y0 інерціальної |
|||||||
инерциальной системы координат и от- |
системи координат і відносного куто- |
|||||||
носительного |
углового |
движения |
вого руху (перекидання), опричинено- |
|||||
(опрокидывания), |
вызванного |
смеще- |
го зміщенням центра мас відносно лі- |
|||||
нием центра масс относительно линии, |
нії, яка з'єднує дві опори, що контак- |
|||||||
которая соединяет две опоры, контак- |
тують з площиною руху у зв'язаній |
|||||||
тирующие с поверхностью движения в |
системі координат OXYZ. |
|
||||||
связанной системе координат OXYZ. |
|
|
|
|||||
Особенностью связанной системы |
Особливістю |
зв'язаної |
системи |
|||||
координат является то, что ее начало |
координат є те, що її початок розта- |
|||||||
находится в центре масс ОАУ, а коор- |
шовується в центрі мас ОАК, а коор- |
|||||||
динатные оси параллельны соответ- |
динатні осі є паралельними відповід- |
|||||||
ствующим осям инерциальной систе- |
ним осям інерціальної системи. Це |
|||||||
мы. Это позволит определить абсолют- |
дасть змогу визначити абсолютні ко- |
|||||||
ные координаты центра масс в пере- |
ординати центра мас в переносному |
|||||||
носном движении, рассматривая ОАУ |
русі, уважаючи ОАК твердим тілом. |
|||||||
как твердое тело. |
|
Угловое положение ψr и угловую |
Кутове положення ψr і кутову |
|
114 |
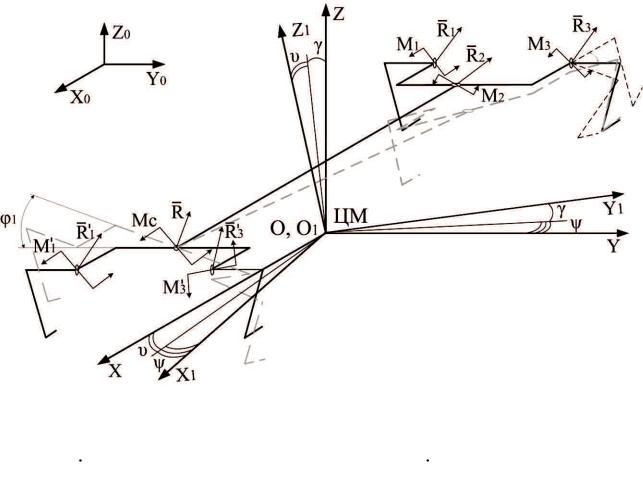
Рис. 3.5. Кинематическая схема |
Рис. 3.5. Кінематична схема |
||||||
шагающего робота «ANI» |
крокуючого робота «ANI» |
||||||
скорость |
|
r |
центра масс при опроки- |
швидкість |
r |
центра мас при переки- |
|
дывании удобно определять в скорост- |
данні зручно визначати у швидкісній |
||||||
ной системе координат OX1Y1Z1, нача- |
системі координат OX1Y1Z1, початок |
||||||
ло которой также расположено в центре |
якої також розташовано в центрі мас і |
||||||
масс и ориентированной таким обра- |
орієнтованої таким чином, що вісь X1 |
||||||
зом, что ось X1 совпадает с направлени- |
збігається |
з |
напрямком швидкості |
||||
ем скорости центра масс υцм . |
|
центра мас |
υцм . |
||||
Графические модели ОАУ в виде |
Графічні моделі ОАК у вигляді |
||||||
3D-модели и кинематической схемы |
3D-моделі й кінематичної схеми дають |
||||||
дают полное представление об особен- |
повне уявлення про особливості прос- |
||||||
ностях |
пространственного движения |
торового руху ланок механічної части- |
|||||
звеньев |
механической части |
объекта |
ни об'єкта моделювання, проте не розк- |
||||
моделирования, однако не раскрывают |
ривають особливостей динамічних вла- |
||||||
особенностей |
динамических |
свойств |
стивостей ОАК. |
||||
ОАУ. |
|
|
|
|
|
|
|
Этап 4. Описание конструкции и |
Етап 4. Опис конструкції і прин- |
||||||
принципа |
функционирования |
шагаю- |
ципу функціонування крокуючого ро- |
||||
щего робота позволило выделить шесть |
бота дав змогу видокремити шість ру- |
||||||
подвижных узлов (см. рис. 3.2): несу- |
хомих вузлів (див. рис. 3.2): несна бал- |
||||||
щая балка, четыре конечности и узел |
ка, чотири кінцівки і вузол кріплення |
||||||
крепления |
видеокамеры. Первые пять |
відеокамери. Перші п'ять вузлів, з'єдна- |
|||||
узлов, соединенных шарнирами, участ- |
них шарнірами, беруть участь у реалі- |
||||||
115
вуют в реализации процесса шагания и |
зації процесу крокування і є твердоті- |
||||||
представляют |
собой |
твердотельные |
льними жорсткими функціонально за- |
||||
жесткие |
функционально законченные |
вершеними конструкціями. Тому вико- |
|||||
конструкции. Поэтому выполнять более |
нувати |
більш детальну декомпозицію |
|||||
детальную декомпозицию |
ОАУ |
нет |
ОАК немає необхідності. |
||||
необходимости. |
|
|
|
|
|
|
|
Этапы 5 и 6 (см. рис. 3.1), связан- |
Етапи 5 і 6 (див. рис. 3.1), пов'язані |
||||||
ные с проведением экспериментального |
з проведенням експериментального до- |
||||||
исследования «ANI» как ОАУ, целесо- |
слідження «ANI» як ОАК, доцільно ви- |
||||||
образно выполнять в замкнутом конту- |
конувати в замкненому контурі автома- |
||||||
ре автоматического управления, так как |
тичного керування, оскільки робот є |
||||||
робот является статически неустойчи- |
статично нестійким об'єктом. |
||||||
вым объектом. |
|
|
|
|
|
|
|
3.3. Нелинейные уравнения |
|
3.3. Нелінійні рівняння математичної |
|||||
математической модели шагающего |
моделі крокуючого робота «ANI» |
||||||
|
робота «ANI» |
|
|
|
|
||
Перейдем к формализации физиче- |
Перейдемо до формалізації фізич- |
||||||
ской модели механической части ша- |
ної моделі механічної частини крокую- |
||||||
гающего робота как объекта управле- |
чого робота як об'єкта керування (етап |
||||||
ния (этап 7). Опишем движение этой |
7). Опишемо рух цієї механічної систе- |
||||||
механической системы с помощью ла- |
ми з допомогою лагранжева формаліз- |
||||||
гранжева формализма. Уравнения Ла- |
му. Рівняння Лагранжа другого роду є |
||||||
гранжа второго рода являются универ- |
універсальним методом складання ди- |
||||||
сальным методом составления диффе- |
ференціальних рівнянь руху матеріаль- |
||||||
ренциальных уравнений движения ма- |
них систем [3]. |
||||||
териальных систем [3]. |
|
|
|
|
|||
Рассмотрим |
движение |
объекта в |
Розглянемо рух об’єкта в площині |
||||
плоскости OXY связанной системы ко- |
OXY |
зв’язаної системи координат |
|||||
ординат (рис. 3.6). |
|
|
|
(рис. 3.6). |
|||
Корпус поворачивается в горизон- |
Корпус повертається в горизонта- |
||||||
тальной |
плоскости, |
вследствие |
чего |
льній площині, унаслідок чого відбува- |
|||
происходит перемещение вдоль оси X. |
ється переміщення вздовж осі X. Об'єкт |
||||||
Объект |
моделирования есть система |
моделювання є системою рухомих тіл. |
|||||
движущихся тел. Данная система имеет |
Ця система має два незалежні ступеня |
||||||
две независимые степени свободы, так |
свободи, оскільки її положення визна- |
||||||
как её положение определяется двумя |
чається двома параметрами – узагаль- |
||||||
параметрами – обобщенными коорди- |
неними координатами. |
||||||
натами. |
|
|
|
|
|
|
|
При |
построении |
модели приняты |
При побудові моделі зроблено такі |
||||
следующие допущения: |
|
|
припущення: |
||||
1) механизм симметричен относи- |
1) механізм є симетричним віднос- |
||||||
тельно продольной оси; |
|
|
но поздовжньої осі; |
||||
|
|
|
|
|
116 |
|
|
а
|
б |
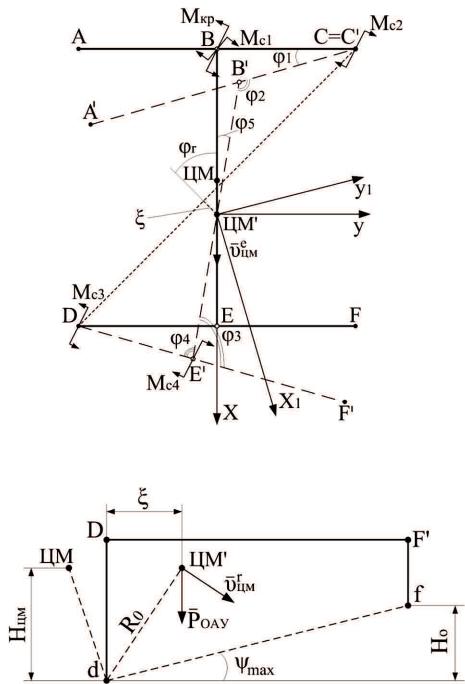
Рис. 3.6. Расчетная схема движения |
Рис. 3.6. Розрахункова схема руху |
робота: а – плоскость XOY; |
робота: а – площина XOY; |
б – плоскость опрокидывания |
б – площина перекидання |
2) центры масс звеньев совпадают |
2) центри мас ланок збігаються з |
с геометрическими центрами; |
геометричними центрами; |
3) люфт в шарнирах отсутствует. |
3) люфту в шарнірах немає. |
С учетом этих допущений движе- |
З урахуванням цих припущень рух |
117
ние центра масс механизма будет осуществляться вдоль оси X. В качестве
обобщенных координат приняты |
угол |
||
поворота звена АС q1 |
= ϕ1 и угол пово- |
||
рота механизма |
при |
опрокидывании |
|
q2 = ψ , однозначно определяющие по- |
|||
ложение всех звеньев механизма. |
|
||
Поскольку |
рассматриваемая |
си- |
|
стема имеет две степени свободы, получаем два уравнения Лагранжа второго рода:
центра мас механізму буде здійснюватися вздовж осі X. Як узагальнені координати взято кут повороту ланки АС q1 = ϕ1 і кут повороту механізму при перекиданні q2 = ψ , що однозначно визначають положення всіх ланок механізму.
Оскільки система, що розглядається, має два ступені свободи, отримуємо два рівняння Лагранжа другого роду:
|
|
d |
|
∂T |
∂T |
= Qϕ ; |
(3.1) |
||||||
|
|
|
|
∂ϕ |
|
− |
|
|
|||||
|
|
dt |
|
1 |
|
|
1 |
|
|
1 |
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
d ∂T |
|
− |
∂T |
= Q |
|
, |
(3.2) |
||||
|
|
|
|
∂ψ |
|
∂ψ |
ψ |
||||||
|
|
dt |
|
|
|
|
|
|
|
||||
где Т – кинетическая энергия механиз- |
|
де Т – кінетична енергія механізму; |
|
||||||||||
ма; |
|
|
|
|
|
|
|
Qϕ |
– узагальнена сила, яка відпові- |
||||
Qϕ |
– обобщенная сила, |
соответ- |
|
|
|
1 |
|
|
|
|
|||
|
дає першій узагальненій координаті; |
||||||||||||
1 |
|
|
|
|
|
|
|||||||
ствующая первой обобщенной коорди- |
|
|
Qψ |
– узагальнена сила, яка відпові- |
|||||||||
нате; |
|
|
|
|
|
|
дає другій узагальненій координаті. |
|
|||||
Qψ |
– обобщенная сила, |
соответ- |
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||
ствующая второй обобщенной координате.
Раскроем слагаемые в выражении Розкриємо доданки у виразі (3.1). (3.1). Кинетическая энергия корпуса Кінетична енергія корпусу робота робота
T = |
m |
xp |
|
||
|
|
|
|
|
|
1 |
|
2 |
|
|
где mxp – масса несущей балки;
x – линейная скорость перемещения центра масс балки;
2 |
xp |
2 |
|
|
|
J |
5 |
|
|
|
z |
, |
(3.3) |
|
|
2 |
|
||
|
|
|
|
|
|
де mxp |
– маса несної балки; |
|
|
|
x – лінійна швидкість переміщення |
|||
|
центра мас балки; |
|
||
xp |
– момент инерции несущей бал- |
Jz |
|
ки относительно оси Z; |
|
5 |
– угловая скорость балки отно- |
сительно ее центра масс.
Линейную скорость x и угловую
скорость  5 выразим через обобщен-
5 выразим через обобщен-
ную координату ϕ1 и ее производную:
xp |
– момент інерції |
несної |
балки |
|
Jz |
||||
відносно осі Z; |
|
|
||
5 |
– кутова швидкість балки відно- |
|||
сно її центра мас. |
|
|
||
Лінійну |
швидкість |
x і |
кутову |
|
швидкість |
5 виразимо через узагаль- |
|||
нену координату ϕ1 та її похідну:
118
a
x |
cos |
|
|
|
|
(
ϕ1
)
−
sin |
( |
|
|
b/a |
|
ϕ1 2
)( |
− cos |
( |
1 |
|
|
− 1− cos |
||
ϕ |
) |
1 |
|
ϕ |
|
1 |
|
)
 1
1
;
(3.4)
ϕ5 |
= arcsin |
a |
(1− cos(ϕ1)) |
; |
5 |
|
|
|
|
sin |
1 |
|
|
|
1 , (3.5) |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
|
b |
|
|
|
|
b/a |
2 |
|
− 1 |
− cos |
ϕ1 |
||||
|
|
|
|
|
|
|
|
|
|||||||
где b, a – длины несущей балки и переднего (заднего) моста соответственно.
де b, a – довжини несної балки й переднього (заднього) моста відповідно.
Кинетическая энергия заднего мо- |
Кінетична енергія заднього моста, |
ста, совершающего поворотное движе- |
який здійснює поворотний рух у пло- |
ние в плоскости ОX0Y0, |
щині ОX0Y0, |
|
|
|
T |
|
|
|
2 |
где |
зм |
– момент инерции заднего мо- |
|
Jz |
|
||
ста относительно вертикальной оси; |
|||
|
1 |
– угловая скорость поворота зад- |
|
него моста.
Кинетическая энергия переднего моста
|
|
T |
|
|
3 |
где |
пм |
– момент инерции переднего |
Jz |
||
моста относительно оси Z; |
||
|
3 |
– угловая скорость поворота |
переднего моста.
Особенностью движения механизма при изменении координаты ψ является то, что это движение вызвано смещением центра масс относительно линии, соединяющей две опорные точки ОАУ во время движения (точки С и D на рис. 3.6). В свою очередь, смещение центра масс приводит к возникновению опрокидывающего момента. При этом ОАУ совершает вращательное движение как твердое тело вокруг оси, проходящей через линию СD. Кинетиче-
|
|
|
зм |
|
|
2 |
|
|
|
|
= |
|
J |
|
|
1 |
|
|
|
|
|
|
|
z |
|
, |
(3.6) |
|||||
|
|
2 |
|
|
||||||
|
|
|
|
|
|
|
|
|||
де |
зм |
|
– момент інерції заднього моста |
|||||||
Jz |
|
|||||||||
відносно вертикальної осі; |
|
|||||||||
|
|
|
1 |
|
|
– кутова швидкість повороту зад- |
||||
нього моста. |
|
|||||||||
|
|
|
Кінетична енергія переднього мос- |
|||||||
та |
|
|
|
|
|
|
|
|
||
|
|
|
пм |
|
2 |
|
|
|
|
|
= |
|
J |
3 |
|
|
|
|
|||
|
|
z |
|
|
, |
(3.7) |
||||
|
|
2 |
|
|
||||||
|
|
|
|
|
|
|
|
|||
де |
пм |
– момент інерції переднього мо- |
||||||||
Jz |
|
|||||||||
ста відносно осі Z; |
|
|||||||||
|
|
|
3 |
– кутова швидкість повороту пе- |
||||||
реднього моста. |
|
|||||||||
|
|
|
Особливістю руху механізму при |
|||||||
зміненні координати ψ є те, що цей рух спричиняється зміщенням центра мас відносно лінії, що з'єднує дві опорні точки ОАК під час руху (точки С і D на рис. 3.6). У свою чергу, зміщення центра мас призводить до виникнення перекидального моменту. При цьому ОАК здійснює обертовий рух як тверде тіло навколо осі, що проходить через лінію СD. Кінетична енергія ОАК як твердого тіла при перекиданні може бу-
119
ская энергия ОАУ как твердого тела ти подана у вигляді при опрокидывании может быть представлена в виде
|
|
J |
|
2 |
|
R |
2 |
T |
= |
o |
m |
ОАУ |
o |
||
|
|
|
|||||
4 |
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
2
,
(3.8)
где Jo – момент инерции ОАУ относительно линии опрокидывания;
 – угловая скорость опрокидыва-
– угловая скорость опрокидыва-
ния;
mОАУ – масса ОАУ;
Ro – радиус опрокидывания. Радиус опрокидывания определя-
ется величиной смещения центра масс (см. рис. 3.6):
де |
Jo – момент інерції ОАК відносно |
лінії перекидання; |
|
|
– кутова швидкість перекидання; |
|
mОАУ – маса ОАК; |
|
Ro – радіус перекидання. |
Радіус перекидання визначається величиною зміщення центра мас (див. рис. 3.6):
R
2 o
=
H
2 цм
+
ξ
2
,
(3.9)
где Hцм – геометрическая высота цен-
тра масс ОАУ; ξ – смещение центра масс ОАУ от-
носительно линии опрокидывания.
Для получения выражения смещения центра масс ξ запишем уравнение прямой, проходящей через точки C и D:
де Hцм – геометрична висота центра
мас ОАК; ξ – зміщення центра мас ОАК від-
носно лінії перекидання.
Для отримання виразу зміщення центра мас ξ запишемо рівняння прямої, що проходить через точки C і D:
где
yC
KCD = −
y =
=a′ 2
ba′
yC + KCD (x − xC ), |
(3.10) |
|
де |
|
|
(1+ cos(ϕ1)); |
|
|
1+ cos(ϕ1) |
; |
|
2 |
|
|
2 |
|
|
− 1− cos |
ϕ1 |
|
|
|
|
|
|
|
a′ |
b |
2 |
|
|
x |
|
= − |
− |
1− cos ϕ |
|||
C |
|
|
|
||||
|
|
2 |
|
1 |
|||
|
|
|
a′ |
|
|
||
2
;
a′ = a , 2
а также уравнение перпендикулярной а також рівняння прямої, перпендикуей прямой, проходящей через смещенлярної до неї, що проходить через змі-
120