

Порядок выполнения работы
1. Запустить макет поточной линии.
- Для запуска контроллера макета используется ПО PuTTy (двойной клик на putty.exe на рабочем столе).
- Откроется окно:
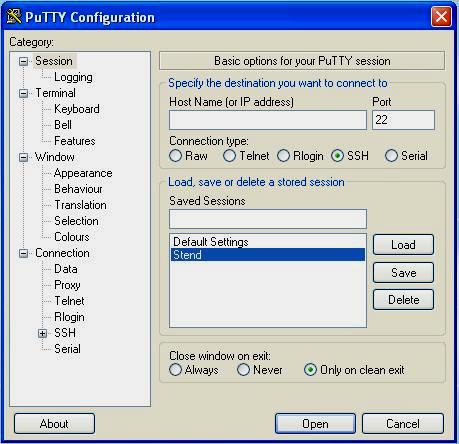
Рис. 4.4. Рабочее окно программы
- В данном окне выбрать строку “stend” и нажать кнопку “Open”. Появится консольное окно.
- В поле login вводим “root” нажимаем Enter.
- В поле password вводим “1” нажимаем Enter.
- Затем вводим имя исполняемой программы (../dasu02.o) нажимаем Enter.
- В окне появятся начальный и конечный фрагменты надписи – программа запущена.
Подключение удаленного пользователя для работы со стендом.
- Подключение к трансляции Web-камеры осуществляется через Web-интерфейс с помощью любого web-браузера.
- В адресной строке набрать http://80.250.190.147:8080/
Появиться изображение с Web-камеры закрепленной рядом со стендом.
- Подключение для управления стендом и запуска программ осуществляется через программу “Подключение к удаленному рабочему столу”. (Пуск → Все программы → Стандартные → Подключение к удаленному рабочему столу).
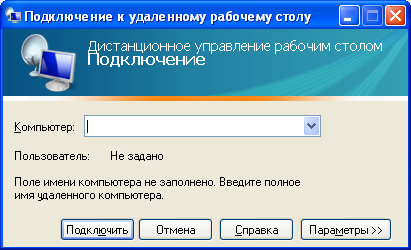
Рис. 4.5. Окно подключения к удаленному рабочему столу
- Для подключения нужно ввести IP адрес 80.250.190.147
Откроется окно, где будет предложено ввести «Имя пользователя» и «Пароль».
Имя пользователя: Rstud
Пароль: (вход без пароля)
Откроется окно рабочего стола Windows удаленного компьютера, к которому подключен стенд. На столе расположены ярлыки для запуска программ iFIX 4.0 Конструктор и клиента подключения к стенду putty.
IP стенда 172.16.64.221
2. Изучить работу макета поточной линии в целом.
3. По заданному варианту элемента макета (табл. 4.1. и 4.2) поточной линии детально рассмотреть порядок его функционирования и взаимодействие с другими элементами.
4. Описать алгоритм функционирования.
4. Содержание отчета
Отчет должен содержать:
Краткое описание макета поточной линии.
Подробное рассмотрение заданного компонента.
Блок схему алгоритма функционирования, выполненную в соответствии с ГОСТ 19.701-90 (ISO 5807-85).
ЛАБОРАТОРНАЯ РАБОТА № 5
ИЗУЧЕНИЕ СИСТЕМЫ УПРАВЛЕНИЯ МАКЕТОМ ПОТОЧНОЙ ЛИНИИ МАКЕТА ПОТОЧНОЙ ЛИНИИ
1. Цель работы
Изучение и анализ работы системы управления макетом поточной линии на базе промышленного контроллера Beckhoff .
2. Указания к выполнению лабораторной работы
С
2
1
3
4
5
6
7





Рис. 5.1. Схема макета поточной линии
Объекты управления
Поточная линия
• 4 конвейерные секции (поз. 1, 3, 4, 6 рис. 5.1), обеспечивающие перемещение детали;
• 2 толкателя (шибера) (поз. 2, 5 рис. 5.1)служащие для изменения направление движения;
• 2 рабочие станции (сверлильная и фрезерная) (поз. 8, 9 рис. 5.1) подачи делили на станки и имитация их обработки;
Трехосевой робот (поз 7 рис. 5.1) служит для замыкания рабочего цикла. Выполняет следующие виды перемещений:
• поворот на 180°
• вертикальное перемещение
• горизонтальное перемещение.
Для манипулирования деталями оснащен механическим схватом.
Датчики
• Концевые выключатели: сухой контакт (рис. 5.2)




Рис. 5.2. Конечные выключатели
а) робота, б) шибера
• Счетчики оборотов: сухой контакт (рис. 5.3)

Рис. 5.3. Счетчик оборотов
• Присутствие детали: лампа накаливания +фототранзистор (рис. 5.4)
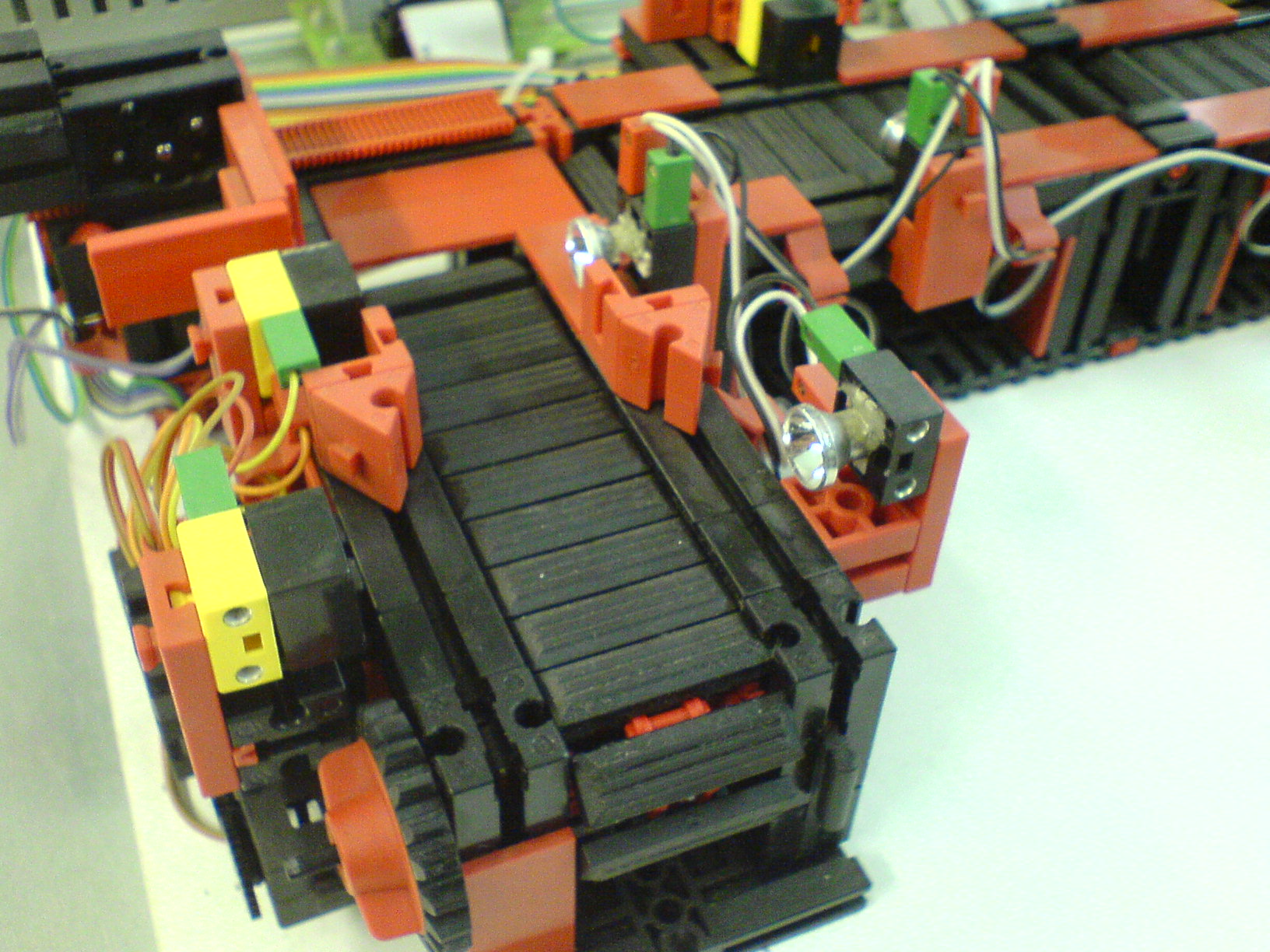



Рис. 5.4. Оптико-электронный барьерный датчик
а) загрузочная станция, б) рабочая станция
И
а)
б)
б)
Приводятся в действие двигателями постоянного тока с возбуждением от постоянных магнитов:
• Конвейер: напряжение питания – 12В, режим работы – нереверсивный (рис. 5.5.а);
• Имитаторы станков: напряжение питания – 12В, режим работы – нереверсивный (рис. 5.5.б);
а)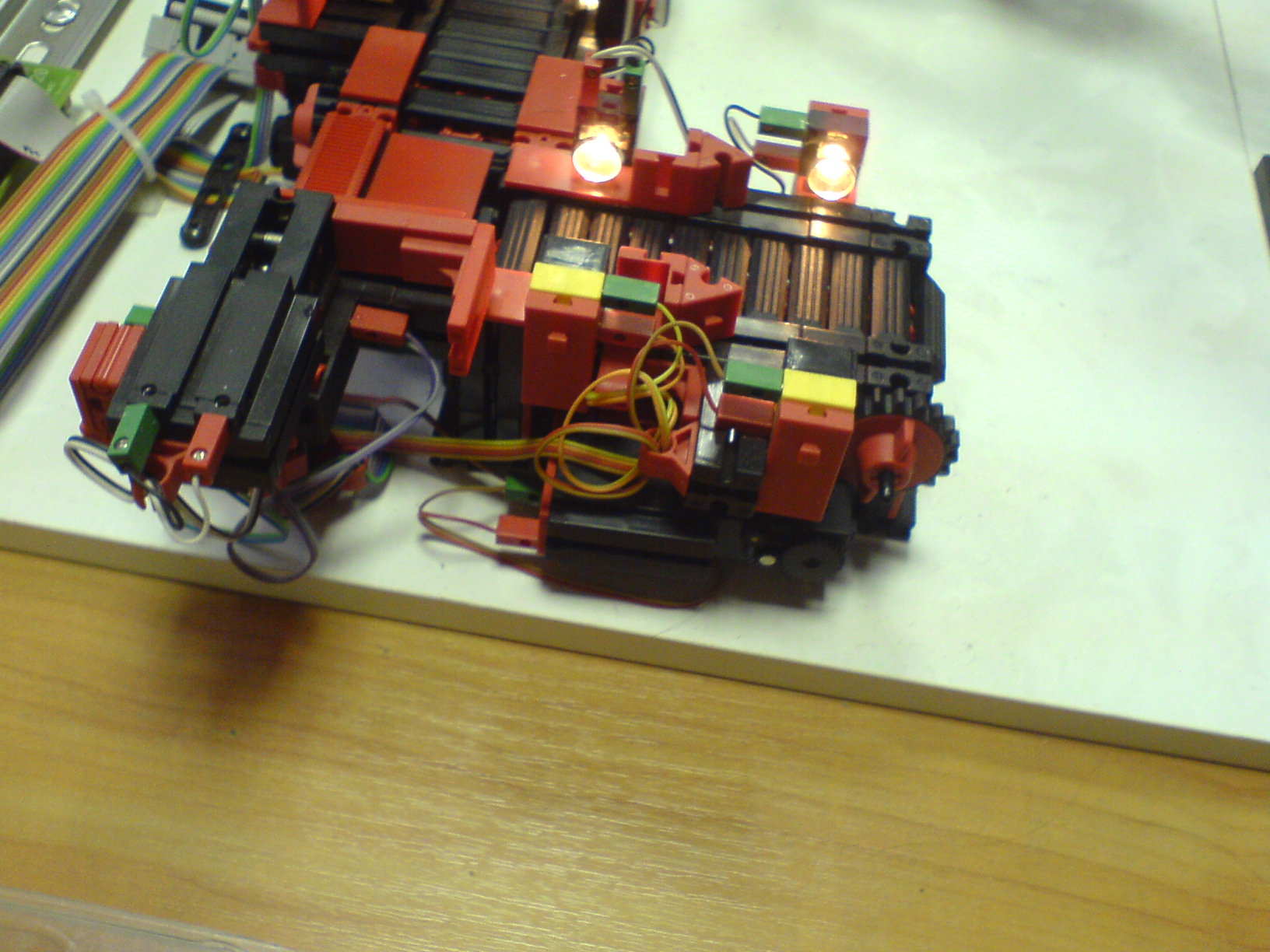

Рис. 5.5. Приводы: а) конвейера, б) имитатора станка
• Шибер (рис. 5.6): напряжение питания – -12В, режим работы – реверсивный (рис. 5.6);
Рис. 5.6. Привод шибера
• Робот: напряжение питания – 9В режим работы – реверсивный (рис. 5.7);
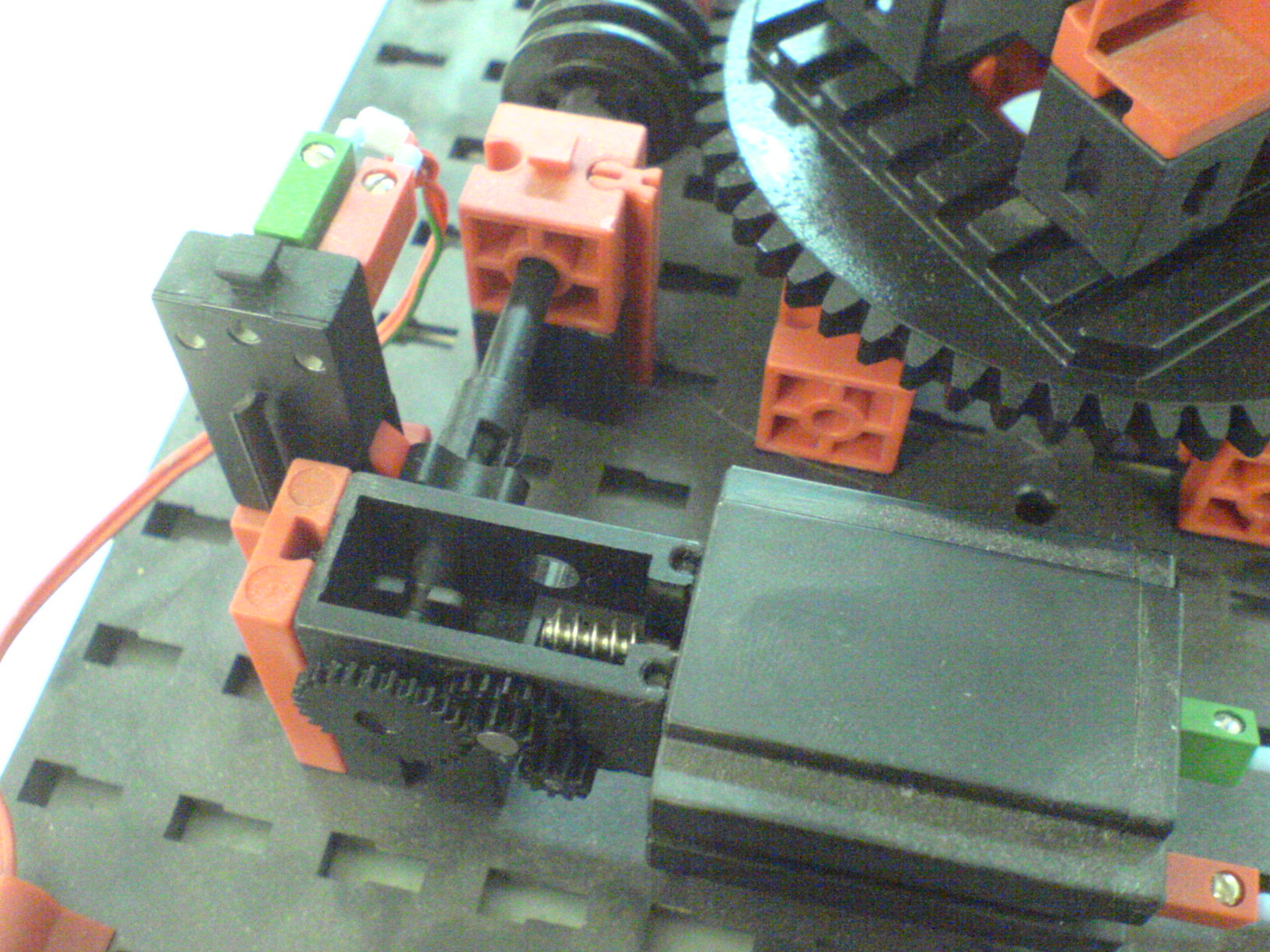
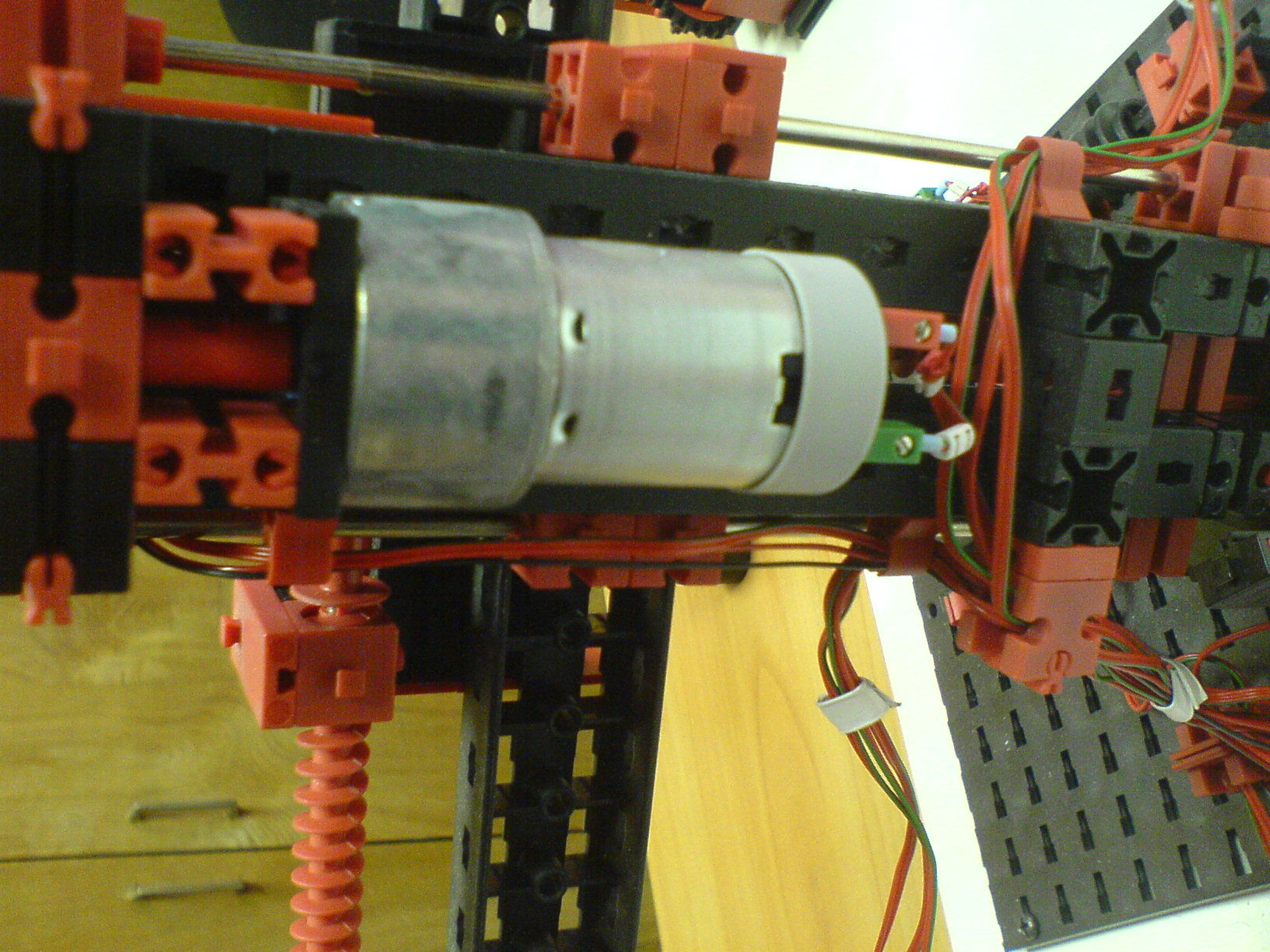
Рис. 5.7. Приводы робота: а) поворота, б) подьема
Управляющее устройство
Контроллер Beckhoff CX1000-000 (рис. 5.8.)
Основные характеристики контроллера Beckhoff CX1000-000.
• Совместимость с PentiumR MMX, частота 266 Мгц
• Compact Flash card
• ОЗУ 32 MB
Модули расширения
Дискретный вывод KL2408- 3 шт
• 24В
• 8 выходов
• Дискретный ввод KL1408 KL2408- 3 шт
• 0: -3 ÷ +5 В, 1: 11 ÷ 30В
• 8 входов
А1
Рис. 5.8. Общий вид контроллера Beckhoff CX1000-000
А
а)