

Теорема о скоростях точек тела при его плоском движении и следствия о проекциях скоростей двух его точек на ось, проходящую через 2 эти точки.
Скорость любой точки плоской фигуры равна геометрической сумме скорости выбранного полюса и скорости точки во вращательном движении фигуры вокруг полюса.
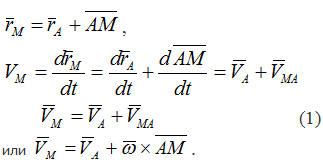
Производная от вектора AM, постоянного по величине и переменного по направлению, численно равна скорости точки М при вращении ее вокруг точки А.
Вектор VMA= ω⋅AM перпендикулярен отрезку АМ.
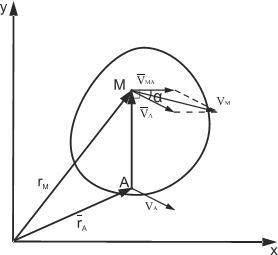
Численную величину скорости точки М можно получить, если воспользоваться теоремой косинусов
![]()
или спроецировать векторное равенство (1) на выбранные оси координат
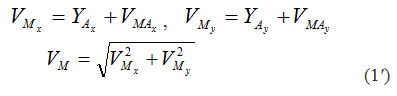
Из теоремы о скоростях точек плоской фигуры следует, что проекции скоростей точек плоской фигуры на ось, проходящую через эти точки, равны. Это легко показывается в рассуждениях:

так как VBA⊥AB , то и проекция VBA на ось АХ равна нулю.
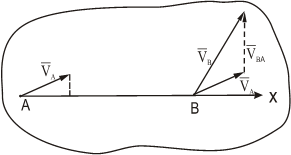
Следовательно, VBx=VAx .
Мгновенный центр скоростей. Способы нахождения.
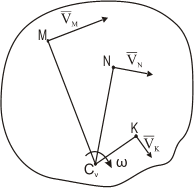
При плоско-параллельном движении в каждый момент времени существует точка, неизменно связанная с плоской фигурой, скорость которой в этот момент равна нолю. Эту точку называют мгновенным центром скоростей.
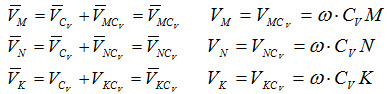
При определении положения МЦС скорость любой точки может быть записана: VM=VCV+VMCV , где точка СV выбрана за полюс. Поскольку это МЦС и VCV=0 , то скорость любой точки определяется как скорость вращении вокруг мгновенного центра скоростей.
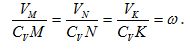
Из рис. видно, что мгновенный центр скоростей лежит в точке пересечения перпендикуляров, проведенных к скоростям точек, при этом всегда справедливо соотношение
Теорема об ускорениях точек тела при плоском движении и следствия о проекциях ускорений двух его точек на ось, проходящую через 2 эти точки.
Ускорение любой точки тела в плоском движении равно геометрической сумме ускорения точки тела в поступательном движении совместно с полюсом и ускорения вращения точки вокруг полюса во вращательном движении тела вокруг полюса.
Дифференцируя по времени выражение
![]() ,
получаем
,
получаем
![]()
В последнем выражении вектор углового
ускорения тела ε направлен по оси
вращения тела, совпадающей с осями Az*
и Az1 , так как при плоском
движении вектор ω не изменяет
своего направления в пространстве,
двигаясь параллельно самому себе. То
есть распределение ускорений в базовой
системе координат такое же, как и при
вращении тела вокруг неподвижной оси.
На рис. 88 показан случай, когда ускоренное
вращение происходит против хода часов,
а остальные оси базовой и связанной с
телом систем координат не показаны.
последнем выражении вектор углового
ускорения тела ε направлен по оси
вращения тела, совпадающей с осями Az*
и Az1 , так как при плоском
движении вектор ω не изменяет
своего направления в пространстве,
двигаясь параллельно самому себе. То
есть распределение ускорений в базовой
системе координат такое же, как и при
вращении тела вокруг неподвижной оси.
На рис. 88 показан случай, когда ускоренное
вращение происходит против хода часов,
а остальные оси базовой и связанной с
телом систем координат не показаны.
Очевидно, что aA является ускорением полюса или ускорением поступательного движения базовой системы координат и тела совместно с полюсом. Согласно векторным формулам для ускорений точек тела при вращательном движении вектор касательного ускорение вращения вокруг полюса равен
|
он перпендикулярен радиусу вращения AB и направлен в сторону углового ускорения, а его величина равна
|
Вектор нормального ускорения равен
|
он направлен по радиусу вращения AB от точки B к полюсу A, а его величина равна
|
При вычислении величин векторов в формулах (8) и (10) учитывалось, что векторы ρ и VBA лежат в плоскости движения, а векторы ω и ε перпендикулярны ей (рис.88).
Подставляя формулы (7) и (9) в выражение для aB , получаем
|
ДИНАМИКА