

Теоремы о парах.
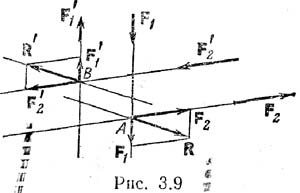
Теорема 1.Две пары, лежащие в одной плоскости, можно заменить одной парой, лежащей в той же плоскости, с моментом, равным сумме моментов данных двух пар. Для док–ва рассмотрим две пары (F1, F`1) и (F2, F`2) (рис. 3.9) и перенесем точки приложения всех сил вдоль линий их действия в точки А и В соответственно. Складывая силы по аксиоме 3, получим R=F1+F2 и R'=F`1+F`2, но F'1=–F1 и F`2=–F2. Следовательно, R=–R', т. е. силы R и R' образуют пару. Момент этой пары: М=М(R, R')=ВАxR=BAx(F1+F2)=ВАxF1+ВАxF2. (3.14). При переносе сил, составляющих пару, вдоль линий их действия ни плечо, ни направление вращения пары не меняются, следовательно, не меняется и момент пары. Значит, ВАхF1=M(F1, F'1)=M1, ВАxF2=M(F2, f`2)=M2, и формула (З.14) примет вид M=M1+M2, (3.15) ч.т.д. Сделаем два замечания. 1. Линии действия сил, составляющих пары, могут оказаться параллельными. Теорема остается справедливой и в этом случае. 2. После сложения может получиться, что М(R,R')=0; на основании замечания1 из этого следует, что совокупность двух пар (F1, F`1, F2, F`2)~0.
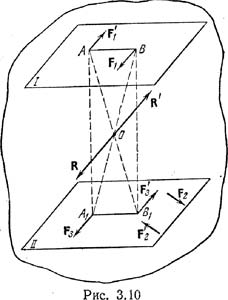
Теорема 2.Две пары, имеющие равные моменты, эквивалентны. Пусть на тело в плоскости I действует пара (F1,F`1) с моментом M1. Покажем, что эту пару можно заменить другой парой (F2, F`2), расположенной в плоскости II, если только ее момент М2 равен М1. Заметим, что плоскости I и II должны быть параллельны, в частности, они могут совпадать. Действительно, из параллельности моментов M1, и М2 следует, что плоскости действия пар, перпендикулярные моментам, также параллельны. Введем в рассмотрение новую пару (F3, F`3) и приложим ее вместе с парой (F2, F`2) к телу, расположив обе пары в плоскости II. Для этого согласно аксиоме 2 нужно подобрать пару (F3, F`3) с моментом М3 так, чтобы приложенная система сил (F2, F`2, F3, F`3) была уравновешена. Положим F3=–F`1 и F`3=–F1 и совместим точки приложения этих сил с проекциями А1 и B1 точек А и В на плоскость II (см. рис. 3.10). В соответствии с построением будем иметь: М3=–M1 или, учитывая, что М1=М2, М2+М3 = 0, получим (F2, F`2, F3, F`3)~0. Т.о., пары (F2, F`2) и (F3, F`3) взаимно уравновешены и присоединение их к телу не нарушает его состояния (аксиома 2), так что (F1, F`1)~(F1, F`1, F2, F`2, F3, F`3). (3.16). С другой стороны, силы F1 и F3, а также F`1 и F`3 можно сложить по правилу сложения параллельных сил, направленных в одну сторону. Они равны по модулю, поэтому их равнодействующие R и R' должны быть приложены в точке пересечения диагоналей прямоугольника ABB1A1, кроме того, они равны по модулю и направлены в противоположные стороны. Это означает, что они составляют систему, эквивалентную нулю. Итак, (F1, F`1, F3, F`3)~(R, R')~0. Теперь можем записать (F1, F`1, F2, F`2, F3,F`3)~(F2, F`2).(3.17). Сравнивая соотношения (3.16) и (3.17), получим (F1, F`1)~(F2, F`2), ч.т.д. Из этой теоремы следует, что пару сил можно перемещать и поворачивать в плоскости ее действия, переносить в параллельную плоскость; в паре можно менять одновременно силы и плечо, сохраняя лишь направление вращения пары и модуль ее момента (F1h1=F2h2).
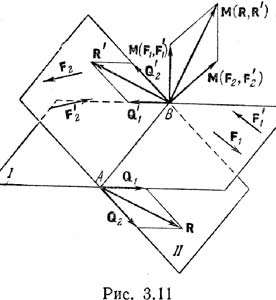
Теорема 3. Две пары, лежащие в пересекающихся плоскостях, эквивалентны одной паре, момент которой равен сумме моментов двух данных пар. Пусть пары (F1, F`1) и (F2, F`2) расположены в пересекающихся плоскостях I и II соответственно. Пользуясь следствием теоремы 2, приведем обе пары к плечу АВ (рис. 3.11), расположенному на линии пересечения плоскостей I и II. Обозначим трансформированные пары через (Q1, Q`1) и (Q2, Q`2). При этом должны выполняться равенства: M1=M(Q1, Q`1)=M(F1, F`1) и M2=M(Q2, Q`2)=M(F2, F`2). Сложим по аксиоме 3 силы, приложенные в точках А и В соответственно. Тогда получим R=Q1+Q2 и R'=Q`1+Q`2. Учитывая, что Q`1=–Q1 и Q`2= –Q2, получим: R=–R'. Т.о., мы доказали, что система двух пар эквивалентна одной паре (R, R'). Найдем момент М этой пары. М(R, R')=ВАxR, но R=Q1+Q2 и М(R, R')=ВАх(Q1+Q2)=BAxQ1+BAxQ2=M(Q1, Q`1)+M(Q2, Q`2)=M(F1, F'1)+M(F2, F`2), или M=M1+M2, т. е. теорема доказана.
Вывод: момент пары является свободным вектором и полностью определяет действие пары на абсолютно твердое тело. Для деформируемых тел теория пар неприменима.