

Вращательное движения твердого тела. Понятие угловой скорости и ускорения.
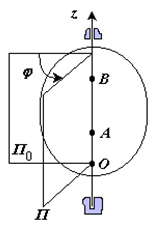
Вращательное движение – это движение твердого тела, имеющего как минимум две неподвижные точки. Прямая, проходящая через эти точки, называется осью вращения. Положение тела определено, если задан угол φ между плоскостями П0 и П , одна из которых неподвижна, а другая жестко связана с телом.
φ=φ(t) – уравнение вращательного движения твердого тела.
Для характеристики изменения угла поворота с течением времени вводится величина, называемая угловой скоростью ω:
![]()
В технике угловая скорость – это частота вращения, выраженная в оборотах в минуту. За одну минуту тело повернется на угол 2π⋅ n, где n – число оборотов в минуту (об/мин). Разделив этот угол на число секунд в минуте, получим
![]()
Угловое ускорение – мера изменения угловой скорости:
![]()
Если угловая скорость ω=const, то вращательное движение называется равномерным. Уравнение равномерного вращения
φ=φ0+ωt
Если угловое ускорение ε=const, то вращательное движение называется равнопеременным.
Уравнение равнопеременного вращения

и уравнение, выражающее угловую скорость в любой момент времени
ω=ω0+εt
Определение скоростей и ускорений вращающегося предмета. Формула Эйлера.
Так как траектории точек вращающегося тела – окружности, при определении скорости и ускорения удобно воспользоваться естественным способом задания движения. Дуговая координата, определяющая положение точки на траектории, связана с углом поворота равенством: s = φR . Отсюда:
![]()
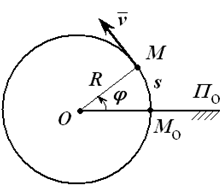
Скорость ν = νττ еще называют линейной или окружной скоростью. Она направлена по касательной к траектории движения точки.
Ускорение определяется как сумма касательного и нормального ускорений:
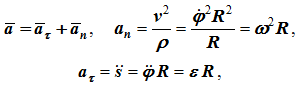
модуль ускорения
![]()
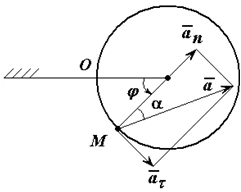
Угол α, образованный вектором ускорения точки с радиусом окружности OM, для всех точек тела в любой момент времени одинаков,

Касательное и нормальное ускорения при вращательном движении твердого тела также называют соответственно вращательным и центростремительным:
![]()
Понятие сложного, абсолютного, относительного и переносного движений.
Сложное движение - движение точки по отношению к некоторому твердому телу, которое в свою очередь движется.
При математическом описании такого сложного движения вводится неподвижная система отсчета и система отсчета жестко связанная с движущимся твердым телом, т.е. подвижная система отсчета. Тогда движение точки относительно подвижной системы отсчета называется относительным движением.
Движение твердого тела и неизменно связанной с ним подвижной системы отсчета относительно неподвижной системы называется переносным движением, а движение точки относительно неподвижной системы – абсолютным движением.
Соответственно вводятся понятия абсолютной скорости и абсолютного ускорения Va , aa относительной скорости и относительного ускорения Vr, ar. Понятия переносной скорости и переносного ускорения Ve , ae требуют уточнения. Переносной скоростью и переносным ускорением называется скорость и ускорение той точки твердого тела или подвижной системы отсчета, в которой в данный момент находится движущаяся точка.
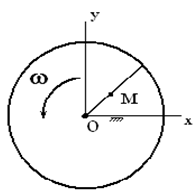
Рассмотрим пример, показанный на рис. Диск вращается вокруг оси, проходящей через центр диска перпендикулярно к его плоскости, с угловой скоростью ω . Введем подвижную систему отсчета xOy , которая вращается вместе с диском.
По радиусу диска движется точка M по закону OM = s(t). Таким образом, точка M участвует в двух движениях. Движется относительно диска по радиусу (относительное движение) и, вместе с диском, вращается вокруг оси, проходящей через центр диска (переносное движение).
Относительной скоростью и относительным ускорением точки M будет являться скорость и ускорение в движении вдоль радиуса диска. Переносной скоростью и переносным ускорением будет являться скорость и ускорение той точки диска, в которой в данный момент находится точка M.