

Способы задания движения точки
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.
![]()
При координатном способе задания движения задаются координаты точки как функции времени:
Это и параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t. Чтобы записать ее уравнение в явной форме, надо исключить из них t.
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t) . Этим способом удобно пользоваться, если траектория точки заранее известна.
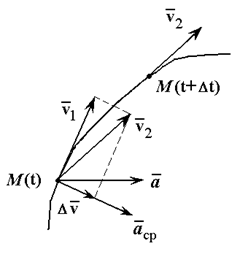
Определение скорости и ускорения точки при векторном способе задания движения.
Рассмотрим перемещение точки за малый промежуток времени Δt:
![]()
тогда

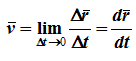
средняя скорость точки за промежуток времени t . Скорость точки в данный момент времени
Среднее ускорение

характеризует изменение вектора скорости за малый промежуток времени Δt . Ускорение точки в данный момент времени
Координатном
Связь векторного способа задания движения и координатного дается соотношением
![]()
Из определения скорости

Проекции скорости на оси координат равны производным соответствующих координат по времени:
Модуль и направление скорости определяются выражениями
Из определения ускорения
Проекции ускорения на оси координат равны вторым производным соответствующих координат по времени
![]()
Модуль и направление ускорения определяются выражениями

Естественном
Из определения скорости точки
Где
![]()
- единичный вектор касательной, тогда
![]()
Алгебраическая скорость – это проекция вектора скорости на касательную, равная производной от дуговой координаты по времени. Если производная положительна, то точка движется в положительном направлении отсчета дуговой координаты.
Из определения ускорения
поскольку τ - переменный по направлению вектор, то:

Производная
![]()
определяется только свойствами траектории в окрестности данной точки, при этом

n - единичный вектор главной нормали,
ρ - радиус кривизны траектории в данной точке.
Таким образом,
т.е. вектор ускорения раскладывается на две составляющие - касательное и нормальное ускорения:

Здесь:

- алгебраическое значение касательного ускорения (проекция вектора ускорения на касательную) характеризует изменение скорости по величине;

– нормальное ускорение (проекция вектора ускорения на главную нормаль) характеризует изменение скорости по направлению. Вектор ускорения всегда лежит в соприкасающейся плоскости и проекция ускорения на бинормаль равна нулю (ab=0).

Движение точки ускоренное, если знаки проекций векторов скорости и ускорения на касательную совпадают.
Поступательное движение тела. Теорема о траекториях, скоростях, ускорениях точек тела. Уравнение поступательного движения.
Поступательное движение твердого тела – это движение, при котором любая прямая, связанная с телом, при его движении остается параллельной своему начальному положению.
Примеры поступательного движения: движение педалей велосипеда относительно его рамы, движение поршней в цилиндрах двигателя внутреннего сгорания относительно цилиндров, движение кабин колеса обозрения относительно Земли и т.д.

Теорема. При поступательном движении твердого тела траектории, скорости и ускорения точек тела одинаковы.
Доказательство.
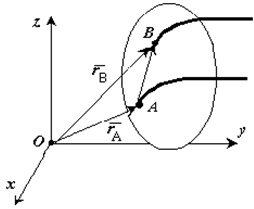
Если выбрать две точки твердого тела А и В (рисунок 1.2), то радиусы-векторы этих точек связаны соотношением
![]()
Траектория точки А – это кривая, которая задается функцией rA(t), а траектория точки B – это кривая, которая задается функцией rB(t). Траектория точки B получается переносом траектории точки A в пространстве вдоль вектора AB, который не меняет своей величины и направления во времени (AB = const). Следовательно, траектории всех точек твердого тела одинаковы.
Продифференцируем по времени выражение
Получаем

Продифференцируем по времени скорость и получим выражение aB = aA. Следовательно, скорости и ускорения всех точек твердого тела одинаковы.
Для задания поступательного движения твердого тела достаточно задать движение одной из его точек:
