

Глава 4 - Структурные схемы для анализа динамических режимов.
4.1 Структурная схема обобщенной электромеханической системы с линеаризованной механической характеристикой
Анализируя электромеханические свойства двигателей различного вида, можно установить, что при определенных условиях механические характеристики принципиально разнотипных двигателей описываются идентичными уравнениями. Соответственно в этих границах аналогичны и основные электромеханические свойства двигателей, что создает предпосылки для обобщенного изучения динамики электромеханических систем.
Возможность такого обобщения вытекает из сравнения уравнений динамической жесткости для двигателей с независимым возбуждением, с последо-
вательным возбуждением при линеаризации в окрестности точки статического равновесия и асинхронного двигателя при линеаризации рабочего участка характе-
ристики при питании от источника напряжения. Все эти уравнения аналогичны по форме и отличаются только выражениями статической жесткости β и электромагнитной постоянной времени ТЭ (или ТЯ). Следовательно, распространив обозначение ТЭ на двигатели постоянного тока (ТЭ = ТЯ), получим следующую форму записи уравнений динамики линеаризованных электромеханических систем:
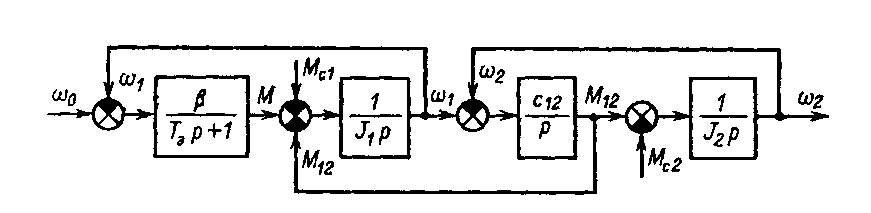
(1 + TЭ p)M = β(ω0 - ω1);
M – c12(φ1 - φ2) – MС1 = J1pω1; (4.1)
c12(φ1 - φ2) – MС1 = J1pω1
Уравнения 4.1 являются обобщенным уравнениями динамики электромеханической системы с упругой передачей и с двигателем, обладающим линейной или линеаризованной механической характеристикой, жесткость которой описывается передаточной функцией апериодического звена с коэффициентом β и постоянной времени ТЭ: βДИН(р) = - β / (1 + ТЭ р). (4.2)
Уравнениям 4.1 соответствует структурная схема на рис 4.1.

Переменными и параметрами ДПТ с независимым возбуждением будут:
![]()
![]()
![]()
(4.3)
А для асинхронного двигателя при линеаризации рабочего участка механической характеристики в области s < sk
ω0 = 2πf1 / p; β = 2Mk/ω0sk; TЭ=1/ω0эл.номsk. (4.4)
Обобщенная электромеханическая система с механической характеристикой, описываемой линейным дифференциальным уравнением первого порядка, является основным объектом изучения теории управления. Она правильно отражает основные закономерности
свойственные реальным нелинейным электромеханическим системам в режимах допустимых отклонений от статического состояния, благодаря простоте обеспечивает возможность обобщенного анализа этих закономерностей методами теории автоматического управления.
4.2 Динамические свойства электропривода с линейной механической
характеристикой при жестких механических связях
В случае если с12= ∞, то φ1 = φ2 = φ, ω1 = ω2 = ω. В результате получаем:
(1 + ТЭр) М = β (ω0 – ω) ;
МС = JΣ pω. (4.5)
Системе уравнений 4.5 соответствует структурная схема , представленная на рис.4.2. Эта схема заслуживает детального анализа, т.к. отражают основные свойства большого числа электромеханических систем с жесткими связями Для анализа свойств такого электропривода в соответствии с рис.4.2 запишем передаточную функцию по управляющему воздействию:
![]()
(4.6)
где ТМ = JΣ/β – электромеханическая постоянная времени.
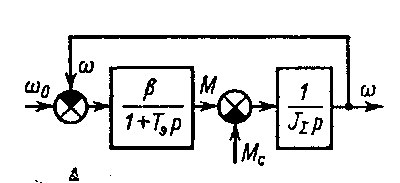
Рисунок 4.2 – Структурная схема электропривода с линейной механической
характеристикой при с12 = ∞
Передаточная функция по возмущающему воздействию имеет вид:
![]()
WВ (р) =
Характеристическое уравнение системы будет: ТЭТМр2 + ТМр + 1 = 0.
Корни характеристического уравнения будут:

Р1,2 =
где m = ТМ / ТЭ – отношение постоянных времени электропривода.
Значение m является важным показателем динамических свойств электропривода, непосредственно определяющим колебательность разомкнутой электромеханической системы при жестких механических связях:
Рассмотрим три варианта соотношения постоянных времени:
а) При m > 4 корни характеристического уравнения будут вещественными отрицательными. В этом случае передаточная функция системы будет равна произведению передаточных функций 2-х последовательно соединенных апериодических звеньев. Частотные характеристики и реакция системы на скачок
управляющего воздействия при нулевых начальных условиях и МС = 0 представлены на рисунке 4.3. При увеличении скачка управляющего воздействия (uЯ или f1) увеличивается максимум момента.
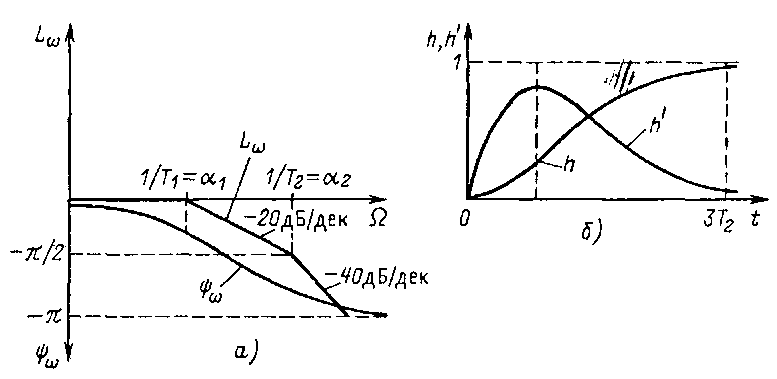
Рисунок 4.3 – Частотные (а) и временные (б) характеристики электропривода с
линейной механической характеристикой при m > 4
Поэтому скачок должен быть ограничен величиной при которой Ммакс остается в пределах, допустимых перегрузочных способностей.
б) При m = 4 характеристическое уравнение системы имеет два равных отрицательных корня. Передаточная функция будет представлена апериодическим звеном второго порядка. Характеристики показаны на рисунке 4.4.
в) При m < 4 характеристическое уравнение комплексные сопряженные корни и электропривод представляет собой колебательное звено с коэффициентом затухания ξ ≤ 1, уменьшающемся по мере уменьшения m.
Учитывая обозначения коэффициентов передаточной функции колебательного звена, принятые в теории управления, можно записать
![]()
W(p) = . (4.4)
С помощью этих равенств установим связь между параметрами электропривода и обобщенного колебательного звена:
![]()
![]()
Т = ; 2ξТ = ТМ; ξ = (4.5)
На рисунке 4.4 приведены частотные характеристики колебательного звена при различных значениях соотношения постоянных m.
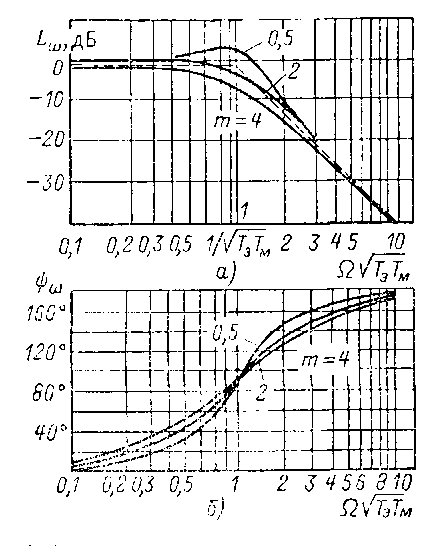
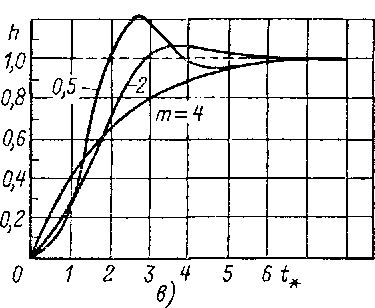
Рисунок 4.5 – Частотные (а, б) и временные характеристики электропривода с линейной механической характеристикой при m < 4 .
Значениям m ≤ 4 соответствуют значения коэффициента затухания ξ ≤ 1.
От соотношения постоянных времени m зависят не только затухание и частота колебаний, но и показатель колебательности λ (логарифмический декре-
мент колебаний) :λ = 2πα /Ωр= 2πm√4m – m2 . (4.6)
При m = 2 и λ = 6.28 колебания затухают практически за один период, а скорость электропривода достигает установившегося значения с небольшим превышением его в переходном процессе, составляющим около 5% установившегося значения. Это значение «2» будет применяться при расчете коэффициентов регуляторов, как коэффициент при ТΣ .
При m < 2 затухание колебаний ухудшается, и в переходном процессе максимальные значения скорости все в большей мере превышают установившееся
значение. При данном m общее время переходного процесса увеличивается пропорционально увеличению ТМ. Из рисунков 4.3 – 4.5 видно, что при уменьшении m изменения фазы в области сопрягающей частоты ω1=1/Т1=√ТЭТМ становятся все более быстрыми.
Таким образом, электропривод с линейной механи-ческой характеристикой вследствие электромехани-ческой инерции представляет собой при жестких механических связях колебательное звено, показатели колебательности которого λ и ξ зависят только от соотношения постоянных времени m=ТМ /ТЭ, а быстродействие определяется электромагнитной
постоянной времени ТЭ или при данном m – электромеханической постоянной времени ТМ.
Электромеханическая постоянная ТМ может изменяться в широких пределах, и ее удобно выразить через произведение собственной электромеханической постоянной времени двигателя и отношение моментов инерции электропривода JΣ и якоря двигателя JДВ:
ТМ = JΣ / β = JДВJΣ / β JДВ = TM.ДВ JΣ/JДВ (4.7)
Для двигателей средней и большой мощности ТМ и ТЭ соизмеримы. Поэтому для двигателей с небольшим моментом инерции 0.5 < m < 2 , а для электроприводов со значительной инерцией m > 2. Для многих электроприводов малой мощности m> 4, при этом можно пренебречь электромагнитной инерцией, положив в (4.5) ТЭ ≈ 0:
М = β(ω0 – ω) ; а М – МС = β ТМр ω (4.8)
Соответствующая приведенным значениям момента в (4.8) структурная схема приведена на рисунке 4.6,а, а, используя правила преобразования структурных схем получим схему рис.4.6,б
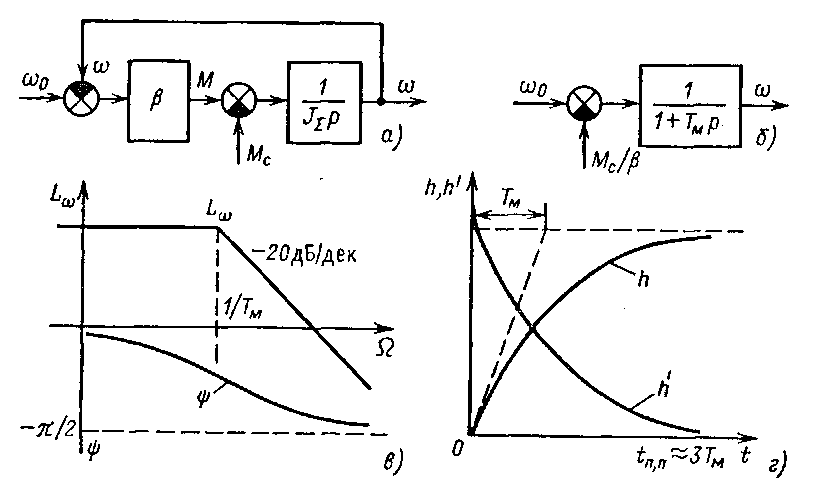
Рисунок 4.6 – Структурные схемы (а и б) , частотные(в) и временные (г)
характеристики электропривода при ТЭ = 0.
Такое преобразование свидетельствует о том, что при сделанных допущениях электропривод с линейной механической характеристикой представляется апериодическим звеном. Частотные характеристики представлены на рис.4.6,в, а переходная и весовая функции – на рис 4.6,г. При анализе переходных процессов в разомкнутой системе электропривода при m > 4, как правило, можно без большой погрешности пренебрегать влиянием электромагнитной инерции и принимать ТЭ ≈ 0.
При синтезе замкнутых систем регулирования координат электромеханической системы малую постоянную ТЭ при m > 4 следует учитывать во избежание ошибок, вносимых не учетом потери запаса по фазе на частоте среза контура регулирования, обусловленной электромагнитной инерцией электромеханического преобразователя.