Потери энергии в установившихся режимах работы электропривода.
Полученное в параграфе 2,1 соотношение (12) относилось к статическому установившемуся режиму работы нерегулируемого привода. В регулируемых приводах наряду с выбором способа регулирования скорости или момента необходимо учитывать потери в преобразовательных устройствах с целью обеспечения экономичности привода.
А) При регулировании скорости электропривода постоянные потери, состоящие из потерь в цепи возбуждения, механических, потерь в стали и преобразователях, в целом будут изменяться. Однако, потери на возбуждение и в преобразователях остаются практически постоянными (если отсутствует изменение магнитного потока), а потери в стали и механические можно считать изменяемыми пропорционально квадрату скорости.
Б) Переменные потери вращающегося преобразователя определяются аналогично таковым для двигателей. К переменным потерям статического преобразователя относятся потери в меди силового трансформатора и в вентилях.
При частотном регулировании скорости машин переменного тока составляющая постоянных потерь – потери в стали статора - существенным образом зависит от диапазона регулирования частоты. Поскольку рабочее скольжение остается небольшим на всем диапазоне изменения скоростей, остальные виды постоянных потерь остаются примерно постоянными.
А как же обстоит дело с переменными потерями, определяемыми выражением:
v
= 3I![]() (R
+ R
(R
+ R![]() )
= Mω
s(1
+
)
= Mω
s(1
+
 )
(18)
)
(18)
При частотном регулировании скорости, за счет постоянства момента двигателя, перепад скорости Δω = ω s = const, а соответственно и переменные потери остаются постоянными. Таким образом, переменные потери в роторной цепи определяются моментом и скольжением, а в статорной цепи еще зависят от соотношения сопротивлений статора и ротора.
Потери энергии в переходных процессах и способы их уменьшения.
Известно, что в переходных процессах ток двигателя, а соответственно и переменные потери значительно превышают номинальные. В этом случае постоянными потерями, как правило, можно пренебречь.
Суммарные потери энергии в переходных режимах определяются выражением:
ΔW
=
![]() ΔP
dt =
[
k(t)
+ v(t)
] dt (19)
ΔP
dt =
[
k(t)
+ v(t)
] dt (19)
В общем случае они оказываются сложной функцией, зависящей от нагрузки на валу, от механической и электромагнитной инерционности двигателя и т.п. Чтобы лучше понять физическую сторону возникновения потерь в переходных режимах электропривода будем пренебрегать электромагнитной инерционностью двигателя и постоянными потерями. Рассматривать будем только активные потери, имеющие место в рабочих цепях двигателей и преобразователей.
В соответствии
со сделанными допущениями и с допускаемым
равенством 3I
R![]() =
Mω
s
, выражение для потерь в роторной
(якорной) цепи двигателя можно определить
по выражению:
=
Mω
s
, выражение для потерь в роторной
(якорной) цепи двигателя можно определить
по выражению:
ΔW
=
 ,
(20)
,
(20)
где t![]() - время переходного процесса;
- время переходного процесса;
s = Δω / ω - относительный перепад скорости для двигателя постоянного тока или скольжение для асинхронного.
А) Сначала упростим задачу и найдем выражение для потерь при отсутствии нагрузки, при этом потери энергии будут обусловлены только переходным процессом.
Подставим в (20) выражение для момента из уравнения движения при М = 0, т.е. М = J dω/dt , и получим:
ΔW
=
 .
(21)
.
(21)
Из приведенного выражения видно, что производная потерь энергии (подинтегральная функция) по скорости не зависит от времени и равна разности количеств движений при скорости ω и текущей скорости ω .
Проинтегрировав
выражение (21), получим формулу для
определения потерь (переменных) при
изменении скорости от ω![]() до ω
до ω![]() вхолостую:
вхолостую:
ω ω
ΔW
= J
ω
ω![]() -
J
-
J![]() ω
/2
=
J
ω
(ω
-ω
)
- J
ω
/2
=
J
ω
(ω
-ω
)
- J
![]() (22)
(22)
ω ω
Заменяя значение скоростей ω и ω в (22) через соответствующие величины скольжения s и s [поскольку ω = ω(1- s ) ; ω = ω (1- s )] и меняя пределы интегрирования, получим:
ΔW
=
J
ω![]() (s
(s![]() -s
-s![]() )/2.
(23)
)/2.
(23)
Таким образом, при изменении скорости затрачивается количество энергии, равное разности кинетических энергий при начальной и конечной скоростях привода, выраженных через запас кинетической энергии привода при скорости ω .
Какими же будут потери энергии в приводе при различных случаях переходных процессов? Рассмотрим некоторые из них, подставляя в (22) или (23) соответствующие начальные условия.
а) Процесс пуска: ω = 1; s = 1; ω = ω ; s = 0.
При этом ΔW = - J ω / 2.
Потери энергии при пуске равны запасу кинетической энергии при разгоне инерционных масс от скорости равной 0 до ω .
б) Динамическое торможение: ω = ω ; s = - 1; ω = 0 ; s = 0.
ΔW = - J ω / 2.
Потери при динамическом торможении численно равны запасу кинетической энергии при пуске, но с противоположным знаком и выделяются в виде теплоты.
в) Торможение
противовключением: ω
=
- ω
; s![]() =
2 ; ω
= 0 ; s
=
1.
=
2 ; ω
= 0 ; s
=
1.
ΔW![]() = 3J
ω
= 3J
ω![]() /
2.
/
2.
Потери энергии при торможении противовключением в три раза больше потерь при пуске, но в 1,5 раза больше энергии, потребляемой из сети [первое слагаемое в (22 )].
г) Сравнивая предыдущие случаи, можно сделать прогнозирующий вывод о том, что при реверсе потери энергии равны четырехкратному запасу кинетической энергии и равны количеству энергии, потребляемой из сети.
Из (22) и (23) видно, что потери энергии в роторной (якорной) цепи не зависят от времени переходного процесса и от формы механической характеристики, а определяются диапазоном изменения скорости в переходном процессе и величиной инерционности системы..
Б) При учете нагрузки к мощности потерь, определяемой переходным процессом при холостом ходе, добавляется составляющая, связанная с нагрузкой. Потери энергии в этом случае зависят от характера статического момента и формы механической характеристики двигателя и определяются выражением:
ΔW
=
 ,
,
где t - время переходного процесса.
Второе слагаемое,
отражающее влияние статической нагрузки,
обозначим как ΔW
,
тогда ΔW
=
![]() М
(ω
- ω)dt
М
(ω
- ω)dt
Согласно (23) первое слагаемое представляет собой потери энергии при Мс = 0, а второе – определяет потери энергии, вызванные наличием момента
сопротивления Мс.
Особое значение правильная оценка потерь энергии имеет для регулируемых электроприводов.
С энергетической точки зрения регулирования скорости или момента означает изменение мощности механической энергии на валу двигателя.
Наиболее просто уменьшить потери энергии на валу двигателя ΔРмех можно, установив на пути устройство, отбирающее часть энергии, при этом отведенную энергию можно рассеять в виде тепла (рис. 2.1.а) или возвратить в сеть (рис.2.1.б ). Первый способ реализуется в реостатных схемах, а второй в каскадных схемах. Наиболее экономично регулировать координаты электропривода так, чтобы мощность потребляемой энергии определялась мощностью, необходимой в данный момент механизму, и потерями. Такие возможности имеют системы УП – Д, позволяющие регулировать параметры U, I, f на входе электромеханического преобразователя таким образом, чтобы управление механической энергией осуществлялось не за счет увеличения потерь, а за счет необходимого снижения потребления энергии электродвигателем (рис.2.1.г). Суммарные потери для регулируемого привода с ДПТ с независимым возбуждением можно представить в виде: ΔР = ΔРв(ΔРмех.н.+ ΔРст.н)(ω/ωн)2 +М(ω`0 – ω) (25)
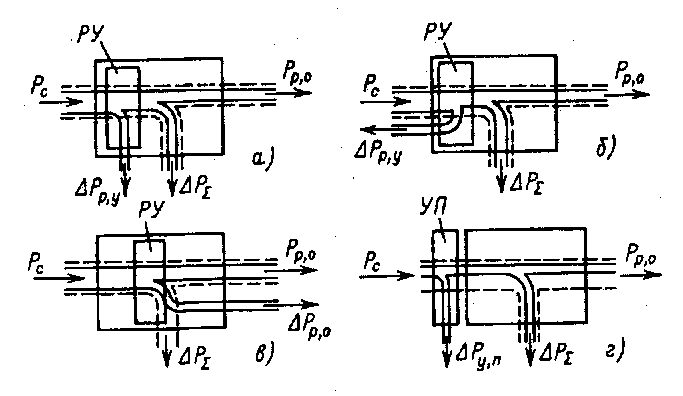
РУ – регулирующее устройство;
УП – управляемый преобразователь
Рисунок 2.1 – Схемы баланса мощности в регулируемом электроприводе .
При регулировании реостатным способом (ω`0= ω0)переменные потери растут пропорционально относительному перепаду скорости, а постоянные снижаются, поэтому изменение суммарных потерь зависит от соотношения постоянных и переменных потерь для данного двигателя и статической нагрузки.
При регулировании скорости путем изменения напряжения (ω0=var), например, с Мс= Мс.ном = const,ток якоря неизменен, неизменны переменные потери и суммарные потери несколько снижаются вследствие снижения постоянных потерь. При регулировании скорости путем изменения магнитного потока двигателя при Мсωс=const ток возбуждения из-за нелинейности кривой намагничивания в большей степени, чем поток. Таким образом, снижение потерь в обмотке возбуждения компенсируется примерно таким же увеличением механических потерь.
Для статического преобразователя с полупроводниковыми вентилями постоянные потери определяются в основном потерями в стали силового трансфор-
матора и реакторов. Эти потери меняются мало, поэтому для управляемых преобразователей постоянные потери практически неизменны и равны номинальным.
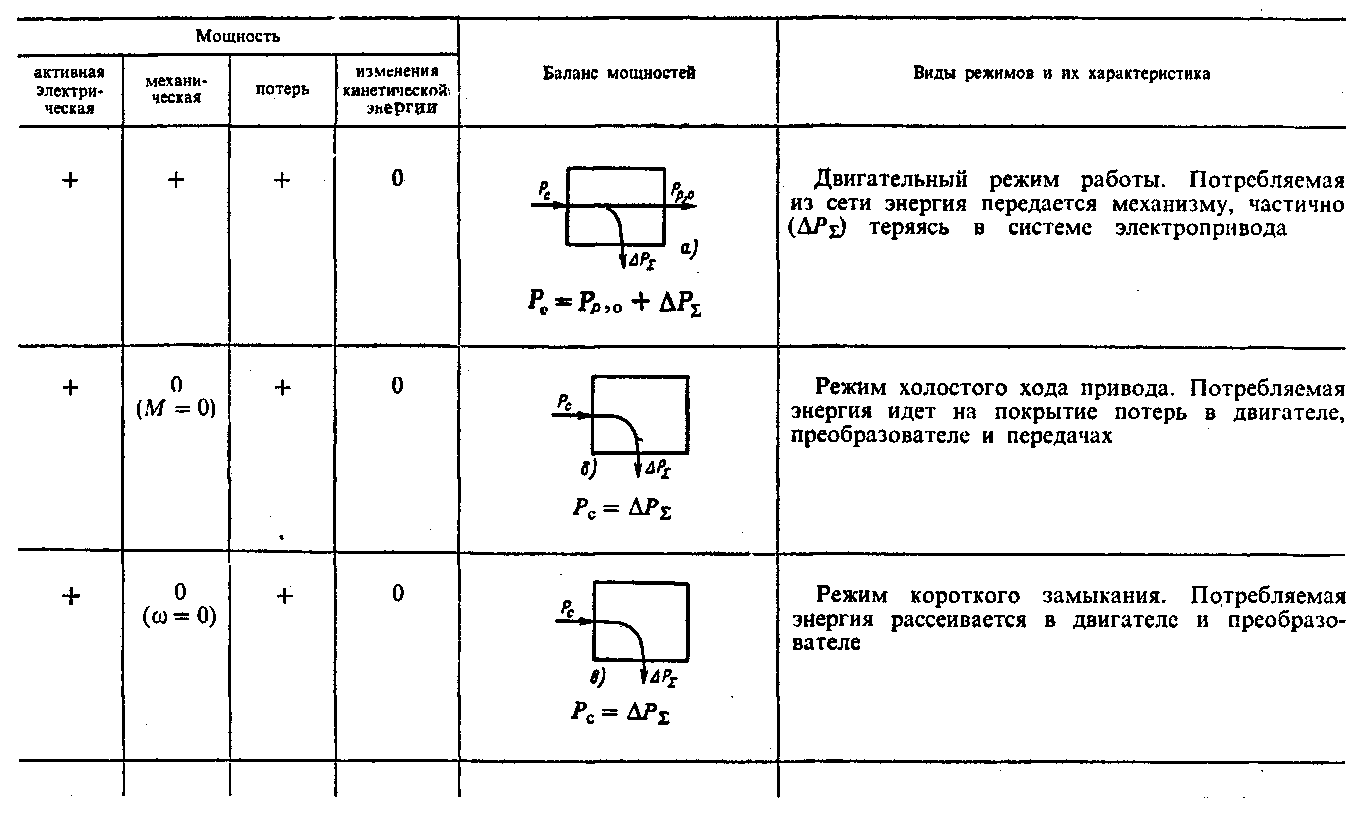
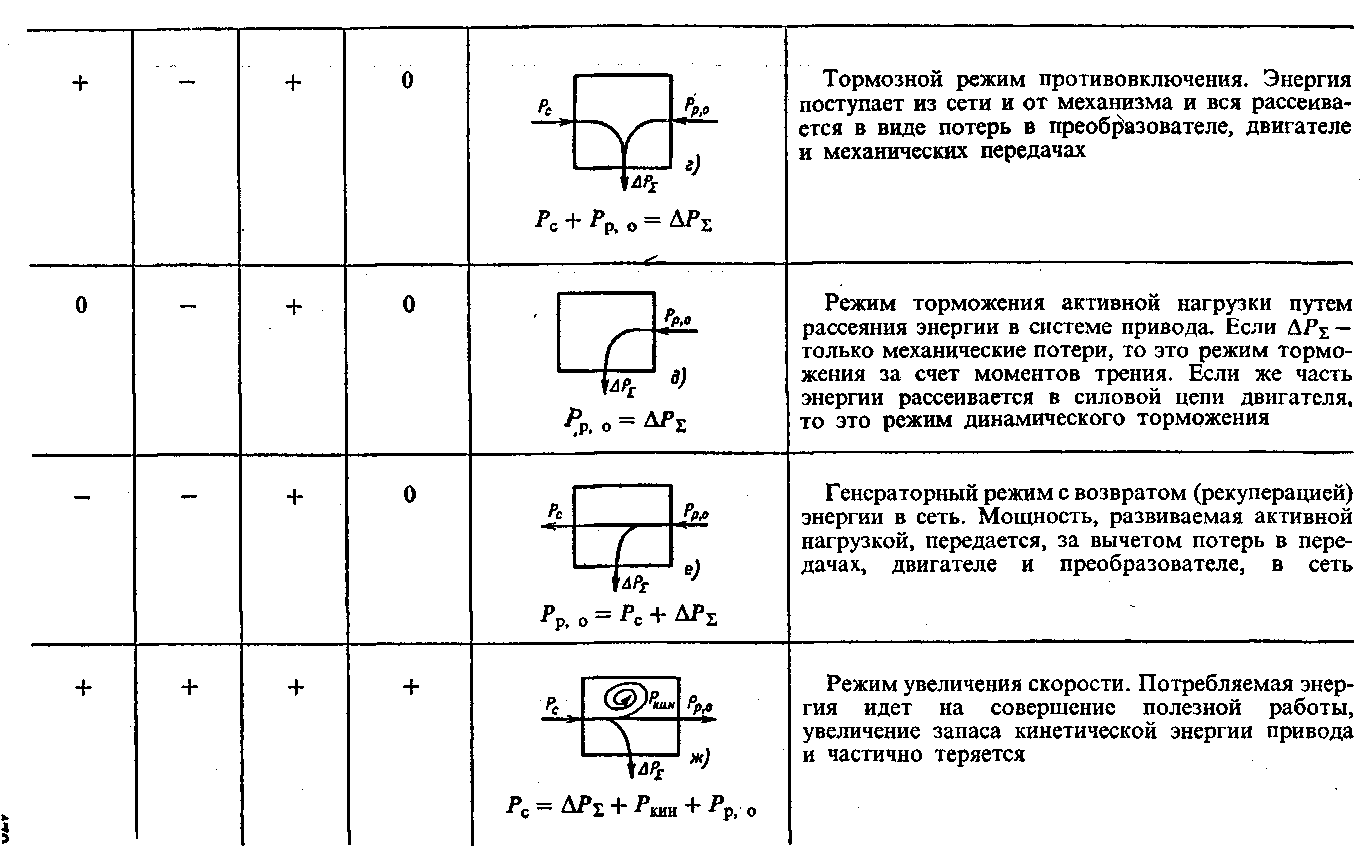
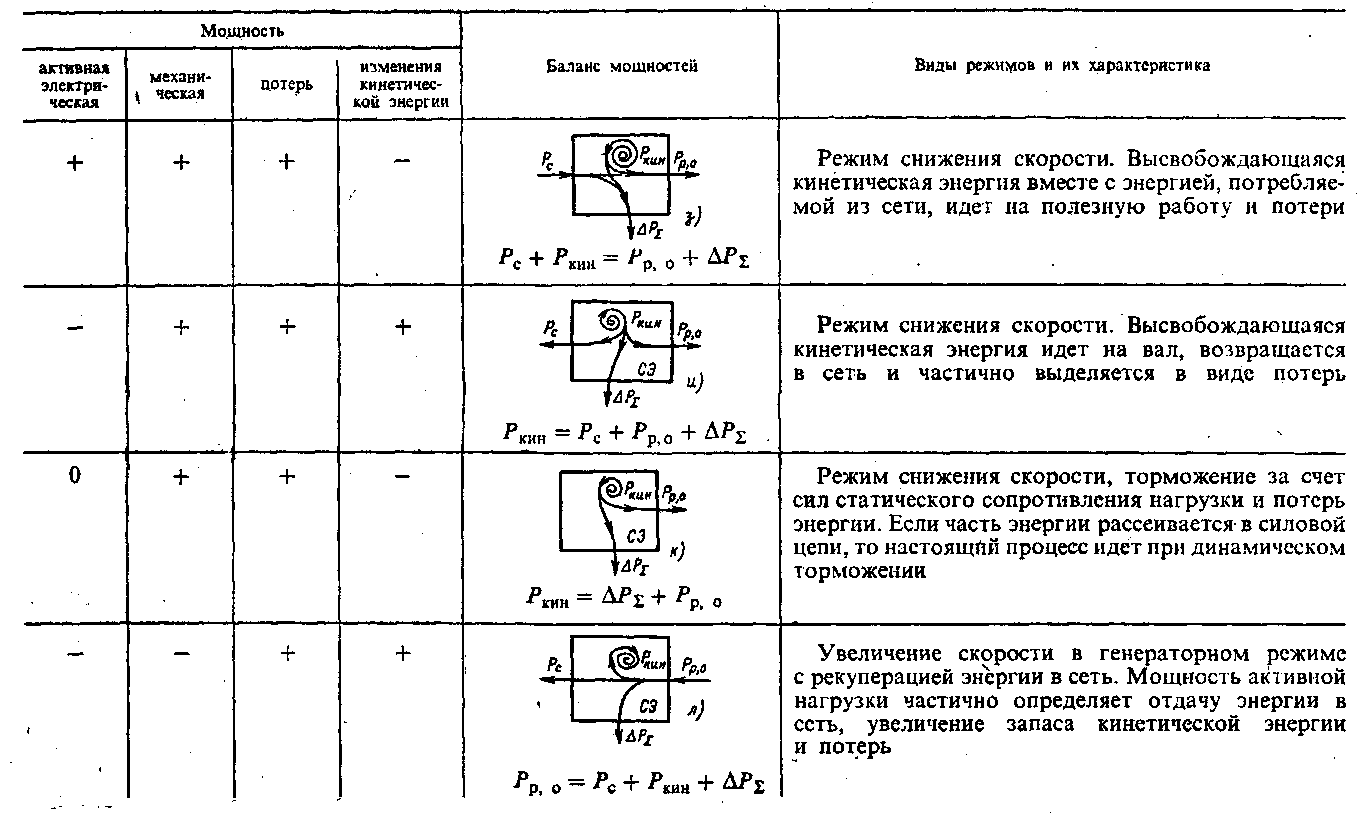
Все энергетические режимы удобно представить в виде таблицы 1, в которой указаны направления составляющих мощностей, соотношения между их величинами и дана краткая характеристика.
Таблица 1 – Потери энергии в различных режимах работы