

4.5 Переходные процессы эп с линейной механической характеристикой
при ω0 = f(t)
В замкнутых системах регулируемого ЭП имеется возможность формировать переходные процессы, достаточно близкие к оптимальным, путем плавного изменения напряжения, подводимого к якорю двигателя постоянного тока, или частоты тока, протекающего по обмоткам статора асинхронного двигателя. Эти особенности можно проследить, задавшись линейным законом изменения управляющего воздействия ω0 во времени
ω0(t) = ω0НАЧ + ε0t .
Если подставить полученное выражение для ω0 в правую часть уравнения механической характеристики получим
ТЭТМ d2ω/dt2 + ТМ dω/dt + ω = ω0НАЧ + ε0t – ΔωС (4.16)
где ΔωС = МС / β.
При m > 2, влияние электромагнитной инерции незначительно сказывается на характере рассматриваемых переходных процессов благодаря плавности изменения управляющего воздействия. Полагая ТЭ ≈ 0 уравнение 4.16 упрощается:
ТМ dω /dt + ω = ω0НАЧ + ε0t – ΔωС (4.17)
Общее решение этого уравнения получим в виде:
ω = ε0t + (ω0НАЧ – ΔωС – ε0 ТМ)(1 – е –t/Тм) + ωНАЧ е –t/Тм , (4.18)
а для момента
М = МС + βε0ТМ + (МНАЧ – МС - βε0ТМ) е –t/ТМ (4.19)
Примерный вид кривых представлен на рис. 4.14.
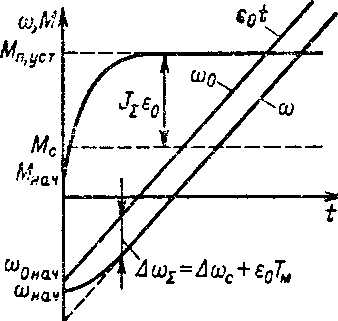
Рисунок 4.13 - Переходный процесс изменения скорости при линейном
законе изменения ω0(t).
Линейный закон изменения управляющего воздействия определяет равномерно ускоренное изменение скорости с ускорением, пропорциональным темпу нарастания напряжения uЯ или частоты f1. Задаваемый закон изменения скорости воспроиз- водится с ошибкой ΔωΣ = ΔωС + ΔωДИН = (МС + JΣε0)/β, которая в установившемся процессе складывается из ошибки, равной статическому падению скорости Δωс = МС/β, и ошибки, равной динамическому падению скорости ΔωДИН = JΣε0/β.
При пуске двигателя процессы происходят по характеристикам приведенным на рисунке 4.13.
При пуске ЭП путем плавного подъема управляющего воздействия от нуля до установившегося значения существенное влияние на переходный процесс оказывает характер момент нагрузки. При постоянстве момента нагрузки МС = const процесс пуска состоит из трех этапов (4.14).
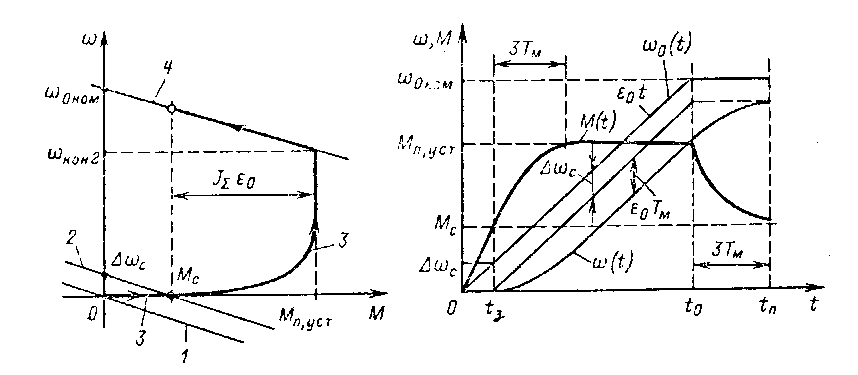
Рисунок 4.14 – Механические характеристики (а) и графики переходного
процесса (б) при ω0 = ε0t
На первом этапе возрастание ω0 = ε0t вызывает линейное возрастание момента короткого замыкания двигателя по закону
Мк.з = βω0 = βε0t (4.20)
но до тех пор, пока Мк.з ≤ Мс, скорость остается постоянной и равной нулю. Первый этап заканчивается при Мк.з = Мс ; это условие позволяет с помощью 4.20 определить время запаздывания начала движения:
tзап = Мс / βε0 = Δωс / β0 (4.21)
На втором этапе движение ЭП определяется по 4.18 и 4.19 при условиях
ω0нач = Δωс; ωнач = 0; Мнач = Мс
ω = ε0 - ε0Тм(1 – е –t/Тм); (4.20)
М = (Мс + βε0Тм)(1 - е –t/Тм). (4.21)
Начало отсчета времени в 4.20 и 4.21 в точке t = tзап.
Третий этап начинается в момент времени t0, когда управляющее воздействие достигает требуемого установившегося значения и его дальнейший рост должен быть прекращен. Двигатель при этом выходит на естественную характеристику 4, и в дальнейшем скорость на этом участке нарастает по экспоненте, а момент уменьшается по тому же закону, стремясь к МС. Общее время переходного процесса составляет tп.п = t0 + 3Тм. Обычно Тм << t0, поэтому время переходного процесса определяется временем нарастания напряжения на якоре или частоты тока статора до установившегося значения (tп.п ≈ t0).