

3.2 Двигатель постоянного тока с последовательным возбуждением.
Схема включения ДПТ с последовательным возбуждением представлена на рис.3.10. Основной особенностью такого двигателя является включение обмотки возбуждения последовательно с обмоткой якоря, вследствие чего ток якоря одновременно является и током возбуждения. Уравнение статической механической характеристики для такого двигателя получается также из уравнения равновесия напряжений для якорной цепи, учитывая тот факт, что магнитный поток является функцией тока якоря:
ω = U / [kФ(IЯ)] – MR/[kФ(IЯ)]2
.
(3.17)
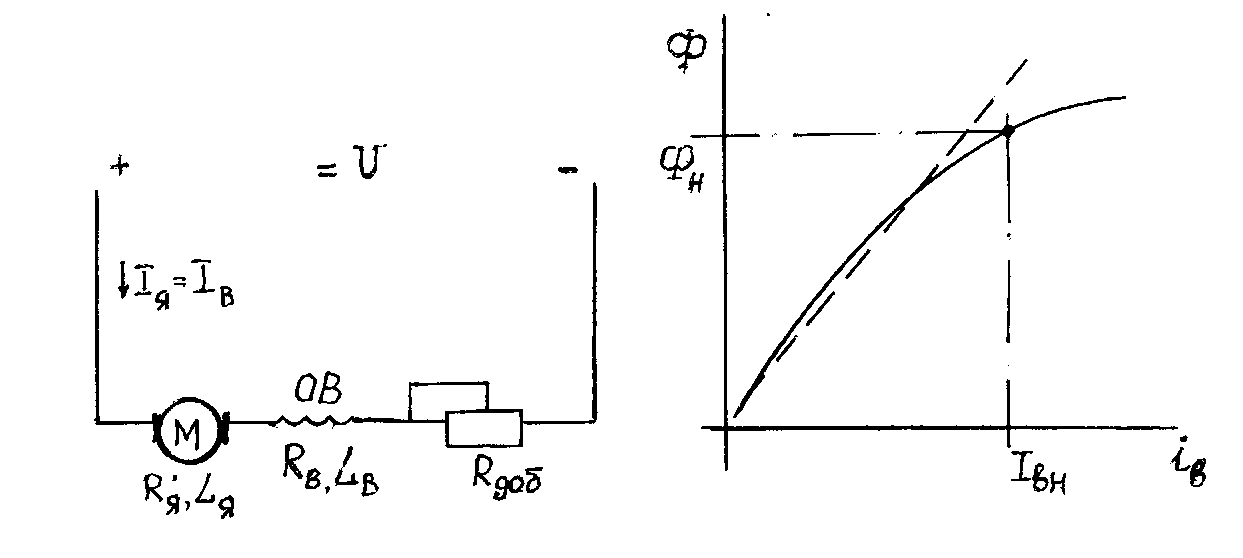
Рисунок 3.10 – Схема включения (а) и кривая намагничивания (б) ДПТ с
последовательным возбуждением
Магнитный поток Ф и ток якорной обмотки IЯ связаны между собой зависимостью, называемой «кривая намагничивания»,представленной на рис3.10.
В общем случае эта кривая не имеет точного аналитического выражения. Тм не менее ее можно представить прямой линией(пунктирная линия на рисунке), применив метод линейной аппроксимации, и получить следующее соотношение:
Ф = βIЯ , где β = tgφ.
При принятой аппроксимации момент ДПТ является квадратичной функцией тока якоря М = kβIЯ2. Подставляя полученное выражение в уравнение (3.17),получим уравнение механической характеристики в виде
____
ω = U / √kβM - R/kβ (3.18)
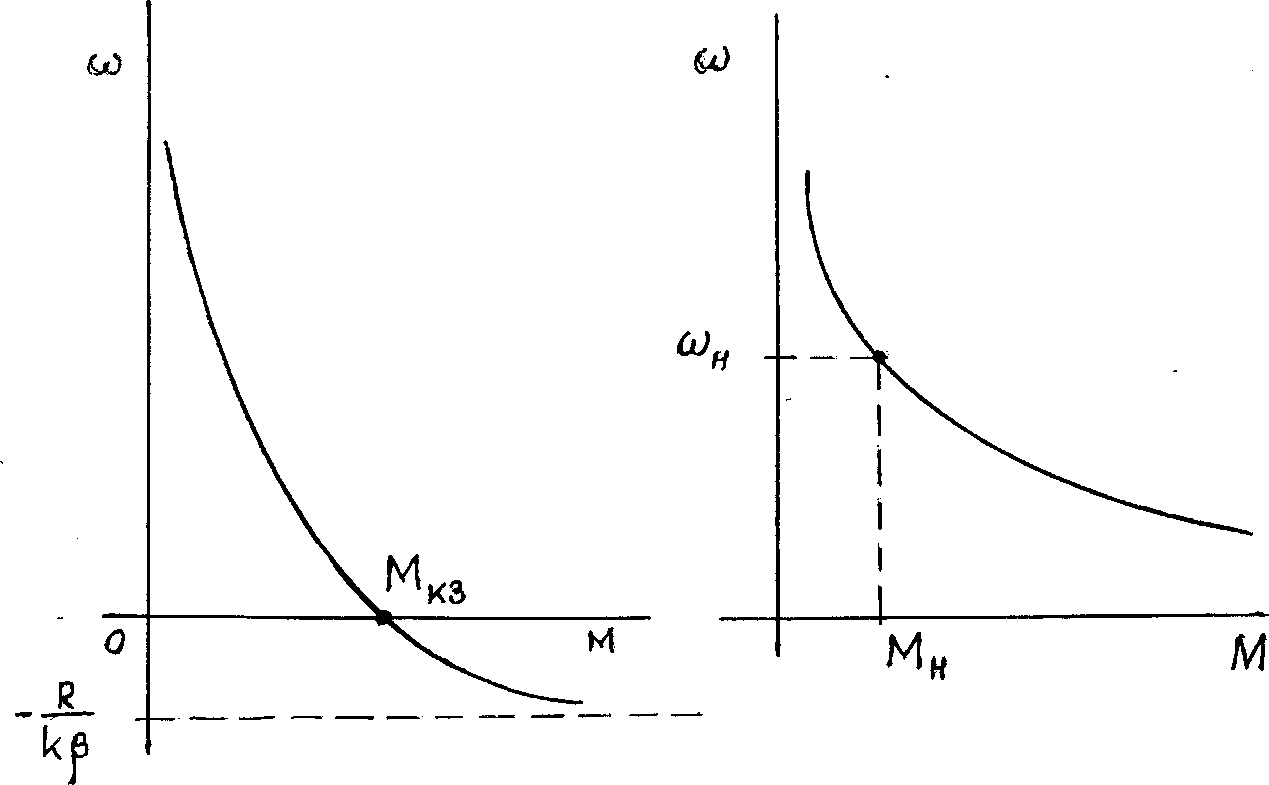
Рисунок 311 – Статические механические арактеристики
(а) –полная и (б) – естественная
Согласно уравнения (3.18) механическая характеристика имеет вид гиперболы (рис.3.11) с асимптотами: ось ординат и горизонталь ω = - R/kβ. Особенностью такого ДПТ является отсутствие у него генераторного режима рекуперативного торможения (работа параллельно с сетью). Характеристики ДПТ не пересекают ось скорости и не переходят во второй квадрант. Для ДПТ с последовательным возбуждение не может быть однозначно определена скорость идеального холостого хода ω0, так как теоретически при Ф→ 0, а ω0→∞. Отметим, что из-за наличия потока остаточного намагничивания Фост скорость холостого хода будет ω0 = U/kФост. Остальные режимы работы ДПТ с последовательным возбуждением аналогичны режимам работы ДПТ с независимым возбуждением и регулирование координат может осуществляться теми же способами (рис3.12).
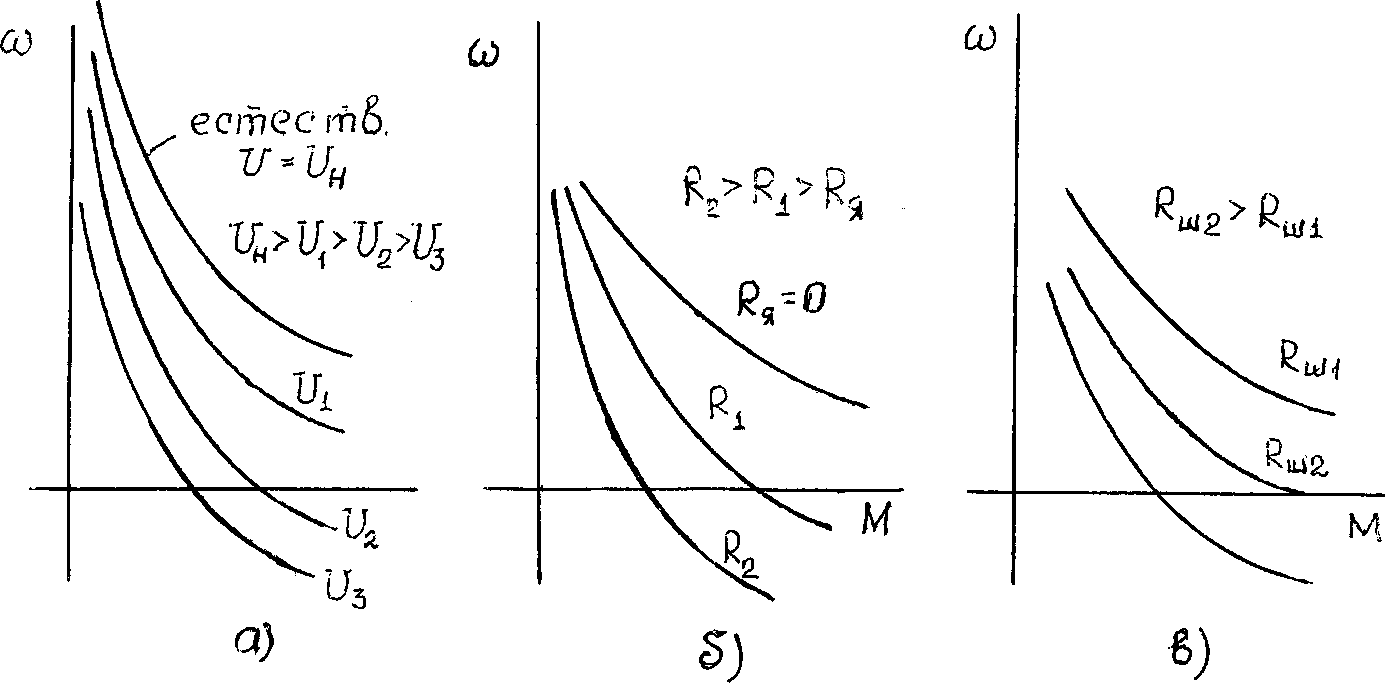
Рисунок 3.12 – Искусственные механические характеристики ДПТ с последовательным возбуждением при изменении: (а) – напряжения питания, (б) – сопротивления якорной цепи и (в) – магнитного потока.
3.3 Свойства двигателей переменного тока
Асинхронный двигатель переменного тока
Схема включения трехфазного АД и соответствующая ей упрощенная схема замещения с вынесенным контуром намагничивания показаны на рис.
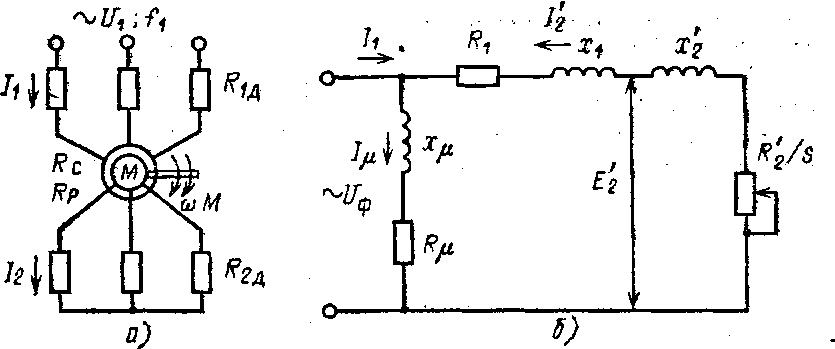
Рисунок 3.13 – Схема включения АД (а) и замещения фазы (б)
На схемах приняты следующие обозначения: U1, Uф – действующие значения линейного и фазного напряжений сети; I1, Iμ, I2` - фазные токи статора, намагничивания и приведенный ротора; x1, xμ, x2` - индуктивные фазные сопротивления статора, контура намагничивания и приведенное ротора; Rc, R1д, R1 = Rс + R1д – активные фазные сопротивления обмотки статора, добавочного сопротивления и суммарное фазы статора; Rр, R2д` R2` = Rр` + R2д` – активные приведенные к частоте фазные сопротивления обмотки ротора, добавочного сопротивления и суммарное фазы ротора; s = (ω0 – ω) / ω0 – скольжение АД;
ω 0
= 2πf1/p
– угловая скорость магнитного поля АД
(синхронная скорость); f1
– частота питающего напряжения; р –
число пар полюсов.
0
= 2πf1/p
– угловая скорость магнитного поля АД
(синхронная скорость); f1
– частота питающего напряжения; р –
число пар полюсов.
 На основании
закона Ома для полной цепи значение
тока для схемы рис.3.13 описывается
выражением
(3.19)
На основании
закона Ома для полной цепи значение
тока для схемы рис.3.13 описывается
выражением
(3.19)
где xk=x1+x2` - индуктивное фазное сопротивление короткого замыкания.
Выражение для механической характеристики АД можно получить, рассмотрев баланс мощности в цепи ротора. Потери мощности в цепи ротора ΔР2, выраженные через механические координаты АД, представляют собой разность электромагнитной мощности Р0 = Мω, то есть:
ΔР2 = РЭМ – Р2 = Мω0 – Мω = Мω0s . (3.20)
Отметим, что вследствие зависимости потерь в роторе от скольжения их часто называют потерями скольжения. Те же потери мощности, считая чисто тепловыми, можно определить как ΔP2 = 3(I`2)2 R`2 . (3.21)
Приравнивая потери в роторной цепи по (3.20) и (3.21),
получим
М = 3I2` R2` /(ω0 s). (3.22)
Подставляя в (3.22) значение тока из (3.19) получим выражение, которое является
М = (3.23)
одной из форм математического представления механической характеристики М(s)
Исследование полученной зависимости М(s) на экстремум, которое осуществляется нахождением производной dM/ds и приравниванием ее нулю, обнаруживает наличие двух экстремальных точек . В этих точках момент и скольжение АД определяются
как М = (3.24)
sk = ` (3.25)
причем знак «+» ставится при s > 0, а знак «-» - при s < 0. Значения момента Мк и скольжения sк АД, соответствующие экстремальным точкам, получили название
максимальных или критических.
Если разделить выражение (3.23) на (3.24) и выполнить несложные преобразования, то можно получить другую, более компактную форму записи
у![]() равнения
механической характеристики (формула
Клосса)
равнения
механической характеристики (формула
Клосса)
где a = R1/R2 (3.26)
Если пренебречь активным сопротивлением обмотки статора, то а = 0 и в этом случае уравнения (3.24), (3.25) и (3.26) принимают вид:
![]()
(3.27)
![]()
(3.28)
sk = R2`/xk ; (3.29)
Если в (3.27) вместо текущих значений момента и скольжения подставить их номинальные значения Мн и sн и обозначить кратность максимального момента Мк/Мн через λм, то может быть получена формула, связывающая критическое и но-
минальное скольжения sk=sн(3.30). Эта формула может быть использована для определения sк по каталожным данным. На рис.3.14 приведена статическая механическая характеристика АД. Одним из наиболее распространенных способов регулирования скорости, тока и момента АД с фазным ротором является введение и изменение дополнительных сопротивлений в цепи ротора Характеристики при регулировании сопротивлений показаны на рисунке
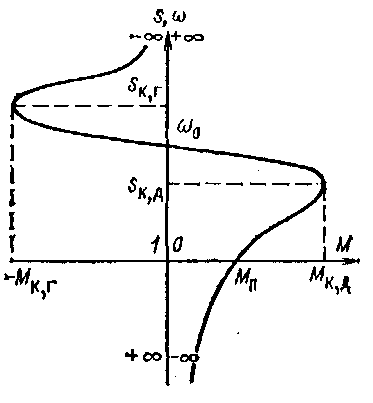
Рисунок 3.14 – Механическая характеристика АД
Характерные точки механической характеристики:
1) s = 0. ω = ω0, М = 0 – точка идеального холостого хода (синхронная скорость);
2) s = 1; ω = 0; M = Mк = Mп – точка короткого замыкания;
3) s = sk; M = Mk; ωk = ω0(1 - sk) – точка экстремума.