

3.4 Регулирование скорости, тока и момента с помощью резисторов в цепях
ротора и статора
 Один
из распространенных способов регулирования
скорости АД с фазным ротором связан с
введением и изменением дополнительных
резисторов в цепи его ротора. Схема, в
которой реализуется этот способ
регулирования, приведена на рис. ,а .
Основным достоинством этого способа
является простота реализации, что
определило его широкое применение в
ряде электроприводов.
Один
из распространенных способов регулирования
скорости АД с фазным ротором связан с
введением и изменением дополнительных
резисторов в цепи его ротора. Схема, в
которой реализуется этот способ
регулирования, приведена на рис. ,а .
Основным достоинством этого способа
является простота реализации, что
определило его широкое применение в
ряде электроприводов.
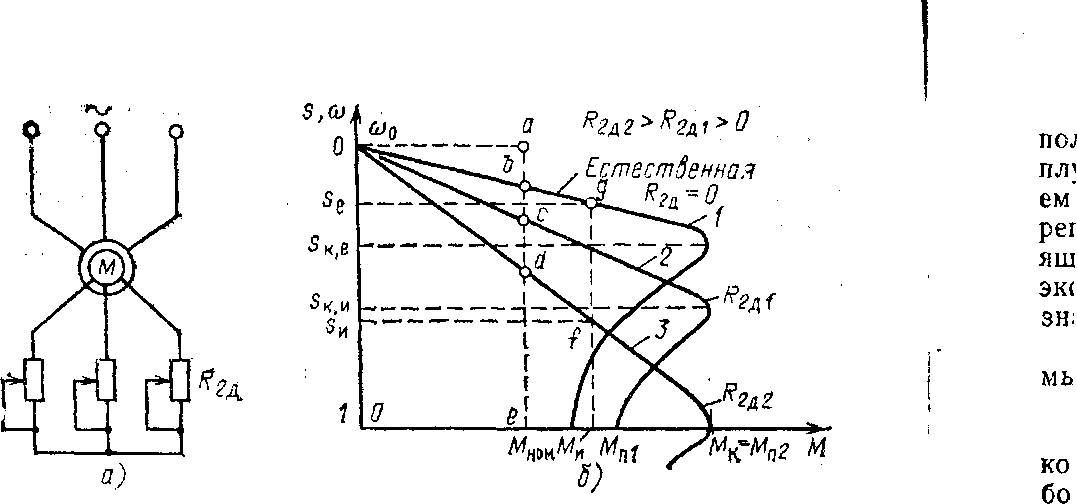
Рисунок
3.21 – Регулирование координат АД с
помощью
резисторов в
цепи
ротора:
(а) – схема, (б) – регулировочные
характеристики

Использование этих характеристик для регулирования скорости АД определяется такими же показателями, что и для ДПТ с независимым возбуждением. Диапазон регулирования скорости небольшой – около 2-3, что определяется снижением жесткости характеристик и ростом потерь по мере увеличения диапазона регулирования.
Расчет сопротивлений добавочных резисторов может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики. Если искусственная характеристика задана своей рабочей частью и точка критического момента не определена, то удобно использовать метод отрезков, который уже рассматривался применительно к ДПТ с независимым возбуждением.
Сопротивление искомого резистора R2Д1 определяется с помощью следующей формулы:
R2Д1 = R bc/ae, (3.30)
где R2НОМ = Е2К/(I2НОМ) - номинальное сопротивление АД; Е2К – ЭДС ротора при s = 1; I2НОМ – номинальный ток ротора.
С помощью метода отрезков из рис.3.13,б при необходимости может быть найдено и сопротивление фазы обмотки АД Rр: Rр = R2НОМ ab/ ae . (3.31)
3.5 Регулирование скорости ад с помощью изменения напряжения на
обмотке статора
Получаемые искусственные характеристики приведены на рис.3.14 .
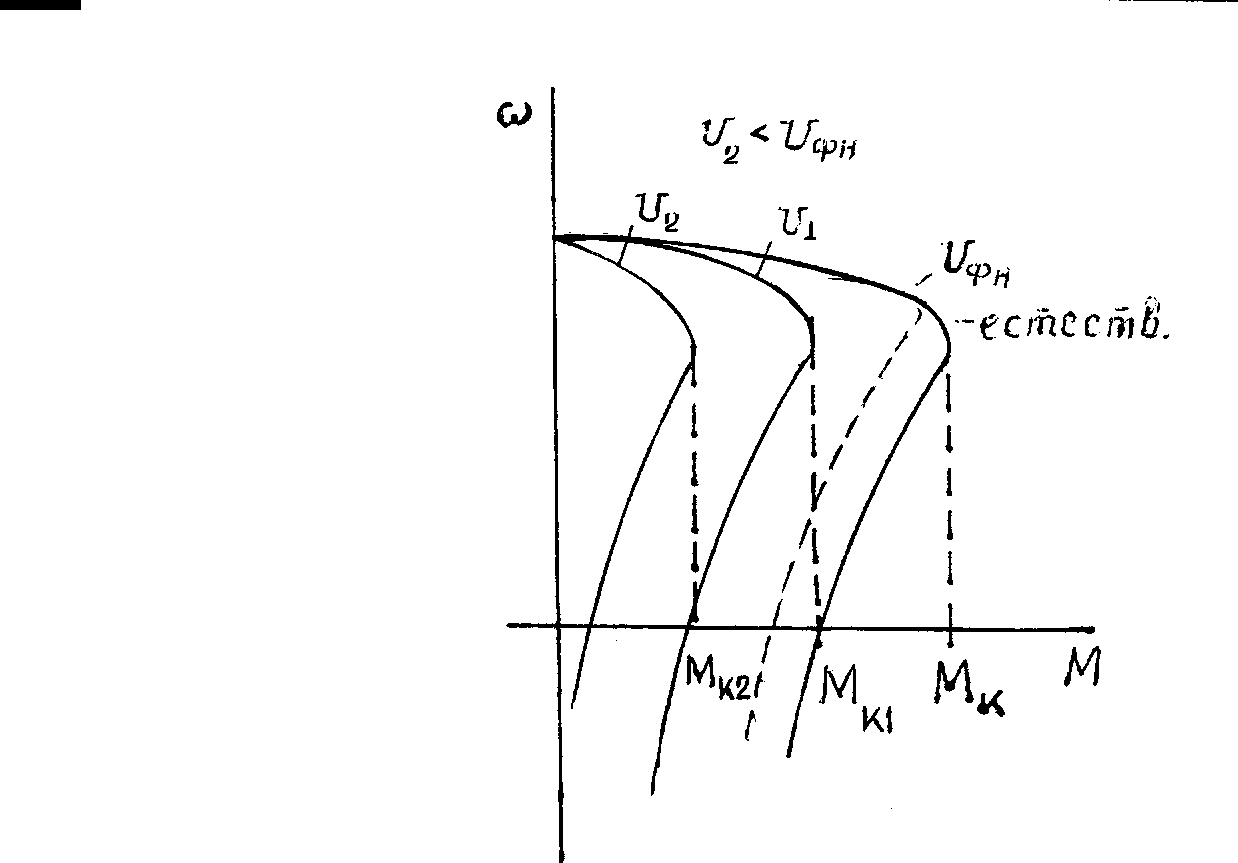
Рисунок 3.14 РегулированиескоростиАД изменение напряжения на статоре
Чаще всего этот способ применяется для АД с короткозамкнутым ротором.
Искусственные характеристики мало пригодны для регулирования скорости, т.к. обеспечивают небольшой диапазон регулирования скорости; жесткость характеристик и перегрузочная способность, характеризуемая критическим моментом, снижаются. По этим причинам разомкнутая система может использо-ваться лишь для регулирования момента АД и его тока. Для регулирования скорости АД создаются замкнутые системы.
3.6 Изменение числа пар полюсов
Изменение числа пар полюсов АД достигается когда на статоре располагаются две (или более) не связанные друг с другом обмотки, имеющие различное число пар полюсов, или за счет изменения схемы соединения статорной обмотки, которая разделена на несколько одинаковых частей (чаще всего на две части) и имеет от них соответствующее число выводов.
При этом изменяется направления тока на противоположное в одной из секций. При этом диапазон изменения скорости равен двум. Наиболее часто на практике применяются две схемы:1– с треугольника на двойную звезду и 2 – со звезды на двойную звезду.
Рассмотрим схемы соединения статора и механические характеристики АД для этих случаев.
1) Треугольник – двойная звезда (Δ/үү).
При cosφ1Δ≈ cos φ1үү допустимая мощность АД остается практически неизменной. Поэтому при увеличении вдвое числа пар полюсов АД и уменьшении тем самым вдвое синхронной скорости допустимый момент на валу увеличивается примерно в два раза.
Механические характеристики АД для данного способа переключения обмоток показаны на рис.3.15,в.Они соответствуют регулированию скорости при постоянной мощности.
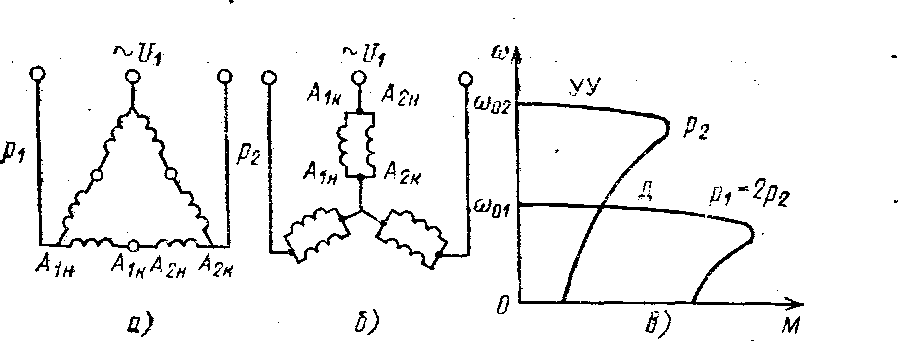
Рисунок 3.15 – Соединение обмоток статора в треугольник (а), двойную звезду (б)
и механические характеристики при схемах (в)
2) Звезда -двойная звезда. В этой схеме меньшей угловой скорости АД соответствует соединение обмоток статора, показанное на рис.3.16,а. Секции фаз статора соединены последовательно и согласно. Переключение на двойную звезду осуществляется по схеме рисю3.15,б, при этом число пар полюсов уменьшится в два раза. В этой схеме изменение скорости происходит при постоянном моменте. К достоинствам такого регулирования следует отнести экономичность регулирования, а к недостаткам – ступенчатость изменения скорости и относительно небольшой диапазон регулирования (6-8).
Рисунок 3.16 – Соединение обмоток статора в звезду (а) и механические
характеристики двигателя при звезда –двойная