

Глава 5. Регулирование координат электропривода (эп)
В изучении вопросов регулирования координат данная глава является вспомогательной. При изучении материалов этой главы необходимо получить представления о показателях, с помощью которых в электроприводе оцениваются различные способы регулирования координат или формулируются требования к регулируемому ЭП. Нужно хорошо ориентироваться в общности используемых в ЭП систем УП – Д и уметь видеть за обобщенной структурой системы УУП – Д , широко используемой для анализа свойств регулируемого ЭП особенности реальных систем ТП – Д и ПЧ – АД.
5.1 Основные показатели способов регулирования координат ЭП.
Для количественного определения предъявляемых к регулируемому ЭП требований и для сопоставления между собой возможных способов регулирования используются обобщенные показатели регулирования такие, как точность, диапазон регулирования, плавность, динамические показатели качества и экономичность регулирования.
Точность регулирования переменной определяется возможными отклонениями ее о заданного значения. При регулировании в разомкнутой системе в качестве заданного может быть принято среднее значение координаты. При этом оценкой точности регулирования может служить отношение наибольшего отклонения Δxmax к среднему значению xср :
Δxmax* = Δxmax/xср , (5.1)
где Δxmax и xср – максимальное и среднее (или установившееся) значения переменной при данных значениях параметра или задающего сигнала.
Количественная оценка точности регулирования по 5.1 во многих случаях применим и при автоматическом регулировании координат. Однако, если по условиям работы ЭП важна точность воспроизведения значений регулируемой координаты, требования к точности определяются допустимой ошибкой регулирования Δxзад.доп, абсолютное значение которой при единичной обратной связи можно записать: Δxзад.max = Ιxзад – xΙmax ≤Δxзад.доп, (5.2)
где xзад.- задающий сигнал; x – текущее значение регулируемой переменной в статических и динамических режимах работы.
При необходимости ошибку регулирования можно представить в относительных единицах, поделив 5.2 на хзад..
Диапазон регулирования характеризует пределы изменения средних значений переменной хср, возможные при данном способе регулирования:
D = хср.max/хср.min . (5.3)
Возможные пределы регулирования переменной ограничиваются сверху максимально допустимыми или максимально реализуемыми значениями переменной, а снизу – требуемой точностью или минимально реализуемыми значениями переменной при данном способе регулирования.
Следует иметь ввиду, что относительная ошибка регулирования Δхmax* по мере снижения хср непрерывно увеличивается.
Плавность регулирования характеризует число дискретных значений регулируемого параметра, реализуемых при данном способе регулирования во всем диапазоне.
Быстродействие определяет быстроту реакции ЭП на изменение воздействий. Главным показателем быстродействия, непосредственно влияющим на производительность ряда механизмов, является время пуска tп и торможения tт ЭП.
При автоматическом регулировании координат быстродействие характеризуют показателями переходного процесса отработки скачка задания (рис 5.1).
Перерегулироваие представляет собой динамическую ошибку и характеризуется максимальным отклонением от хуст при tmax. Как правило, перерегулирование выражают в относительных единицах: Δх1max* = Δx1max/xуст, или в процентах σ. Этот динамический показатель должен учитываться при определении динамической точности отработки ЭП заданных значений координаты..
Колебательность электропривода является фактором, влияющим на точность, динамические нагрузки и качество технологического процесса. Ее общим показателем могут служить значения логарифмических декрементов затухания, соответствующие комплексным корням характеристического уравнения системы.
Важным показателем регулируемого ЭП является его экономичность. Применение регулируемого ЭП связано с определенными дополнительными первоначальными затратами и эксплуатационными расходами, которые должны окупаться повышением производительности и надежности работы установки, а также улучшением качества продукции.
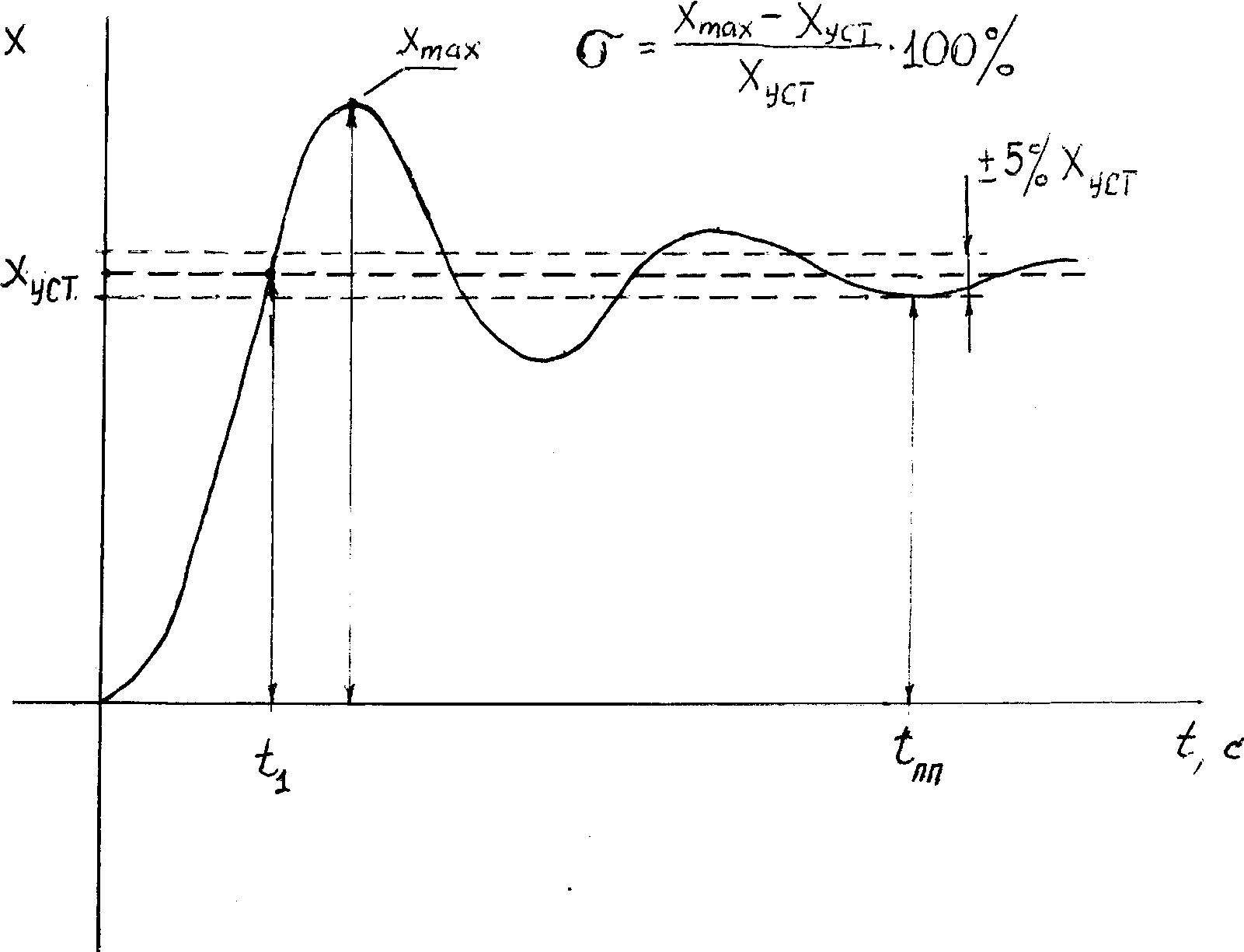
Рисунок 5.1 – Переходная характеристика и показатели
переходного процесса