

3.7 Регулирование скорости ад изменением частоты питающего напряжения
Принцип частотного регулирования заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением ω0 = 2πf1/р изменять его синхронную скорость ω0, получая различные искусственные характеристики. Частотное регулирование обеспечивает плавное изменение скорости в широком диапазоне при сохранении постоянства жесткости механических характеристик, а соответственно и скольжения, что обеспечивает его экономичность в связи с малыми потерями скольжения.
Для получения высоких энергетических показателей (коэффициентов мощности и полезного действия, перегрузочной способности) одновременно с изменением частоты необходимо изменять и величину питающего напряжения. При выборе соотношения между частотой и напряжением часто исходят из условия сохранения его перегрузочной способности λ, которая определяется отношением критического момента МК к моменту нагрузки МС :
λ = МК/МС = А (UФ2/f12МС) = const, (3.32)
где А – постоянная не зависящая от f1.
Отсюда вытекает соотношение , определяющее закон частотного регулирования :
![]()
(3/33)
При различных характеристиках нагрузки получаем разные законы регулирования частоты.
А) При постоянном моменте нагрузки МС = const
UФ/f1 =const (3.34)
Б) Для вентиляторного момента нагрузки :
UФ/f12 =const (3.35)
В) При моменте нагрузки обратно пропорциональном скорости :
__
UФ /√ f1 = const (3.36)
На рис.3.17 приведены механические характеристики АД при выполнении соотношения (3.34).Для частот ниже номинальной критический момент постоянен, что обеспечивает постоянную перегрузочную способность. При частотах выше номинальной, когда напряжение не может быть повышено, критический момент снижается. На практике при уменьшении частоты происходит некоторое снижение критического момента из-за влияния активного сопротивления статора, вызывающего уменьшение магнитного потока, а, следовательно, и снижение ЭДС .
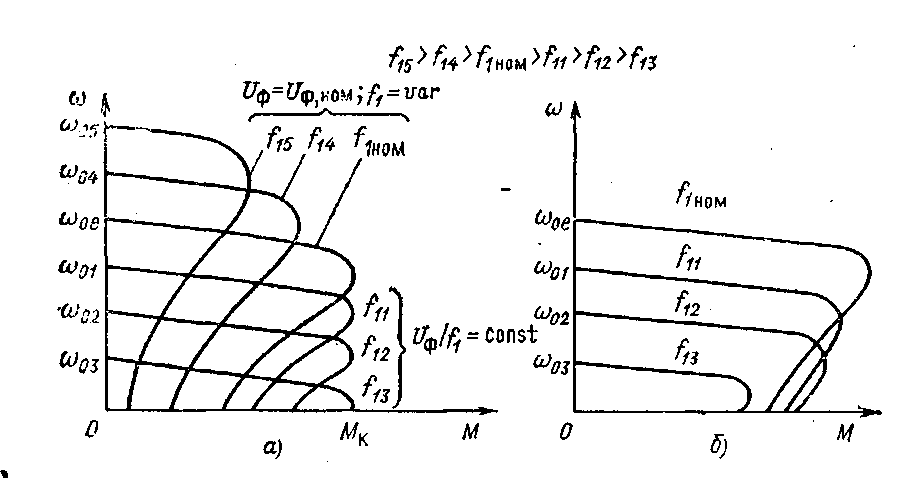
Рисунок 3.17 –Механические характеристики при частотном регулировании.
а– расчетные, б – практические.
Для компенсации этого влияния следует с УМЕНЬШЕНИЕМ частоты снижать напряжение в меньшей СТЕПЕНИ, чем это предусмотрено соотношением (3.34).
Преобразователи частоты можно разделить на две группы: машинные и статические. На рис.3.18 представлена схема машинного преобразователя, где ис-
пользуются обычные электрические машины.
Все статические преобразователи могут быть разделены на две группы: 1)ПЧ с непосредственной связью (рис.3.19) и 2) ПЧ со звеном постоянного
тока (рис.3.20). Рассматриваемые ПЧ позволяют плавно РЕГУЛИРОВАТЬ частоту и напряжение, что НЕОБХОДИМО для ИЗМЕНЕНИЯ скорости.
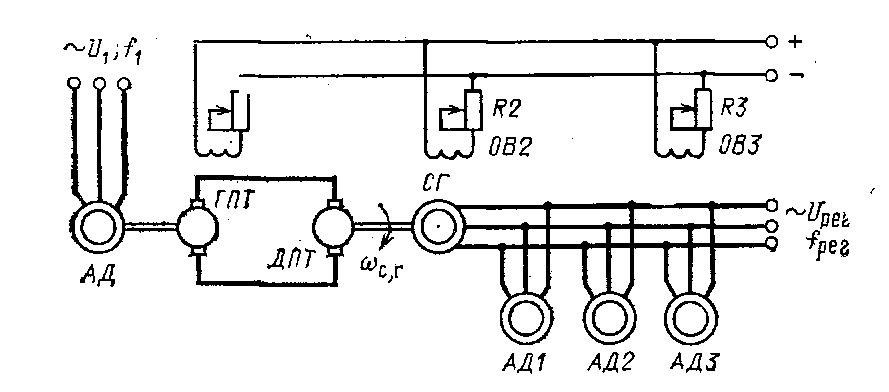
Рисунок 3.18 – Электромашинный преобразователь с синхронным генератором.
Рисунок 3.19 – ПЧ с непосредственной связью
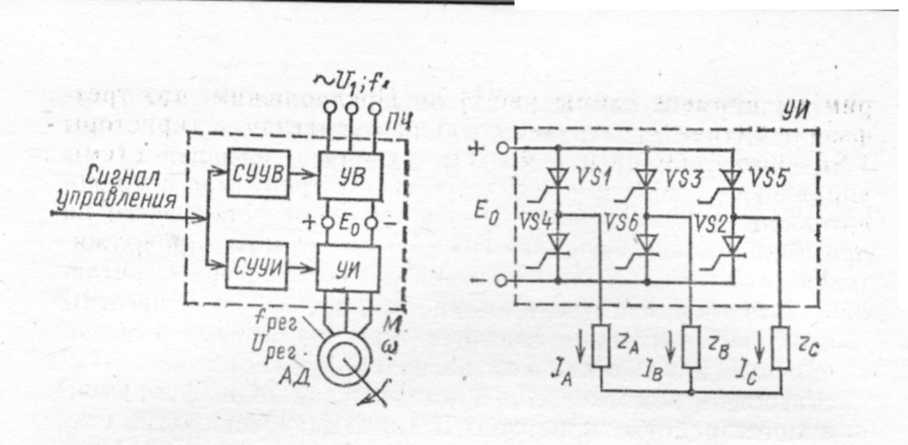
Рисунок 3.20 – Схема ПЧ со звеном постоянного тока и инвертора
Для получения качественных статических и динамических характеристик асинхронного электропривода применяют различные обратные связи (по скорости, магнитному потоку и току или их сочетание).
3.8 Влияние обратных связей на статические характеристики
электропривода в сиcтеме преобразователь напряжения – двигатель.
Характеристики ЭП в разомкнутой системе имеют относительно невысокую жесткость из-за влияния внутреннего сопротивления преобразователя RП. Для получения значительных диапазонов регулирования скорости (десятки, сотни) требуется иметь более жесткие характеристики, которые можно получить лишь в замкнутой системе преобразователь – двигатель (П - Д). Кроме того, характеристики разомкнутой системы не обеспечивают регулирования или ограничения тока и момента, что также требует перехода к замкнутой системе П-Д. Различают три основные типа замкнутых систем П-Д: с обратной связью по скорости, по напряжению и по току. Связь может быть отрицательной, положительной или задержанной. Рассмотрим все эти случаи.
а) Замкнутая система П-Д с отрицательной обратной связью (ОС) по скорости.
Структурная схема замкнутой системы с жесткой отрицательной ОС по скорости показана на рис.3-10.
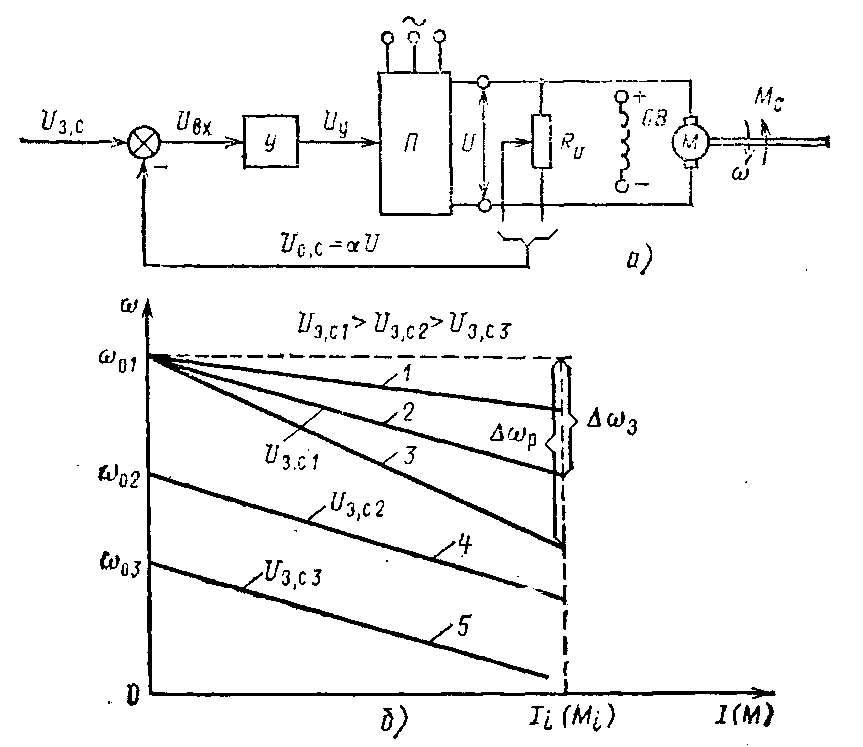
Рисунок 3.10 – Замкнутая система П –Д с отрицательной обратной связью по
скорости: (а) – схема, (б) - характеристики
Для разомкнутой системы преобразователь-двигатель (П-Д) применяются различные типы датчиков скорости. В рассматриваемой схеме использован в качестве датчика скорости тахогенератор (BR), выходное напряжение которого Uтг, пропорциональное скорости ω, является сигналом обратной связи. Коэффициент пропорциональности γ носит название коэффициента обратной связи по скорости и определяется данными тахогенератора.
Сигнал обратной связи Uтг = Uос сравнивается с задающим сигналом скорости Uзс, и их разность в виде сигнала рассогласования (ошибки) Uвх подается на вход усилителя У, который с коэффициентом КУ усиливает сигнал рассогласования Uвх и подает его в виде сигнала управления Uу на вход преобразователя.
Математическое описание статических характеристик в замкнутой системе будет состоять из уравнения статической механической характеристики и уравнений связи: Uвх = Uзс – γω;
Uу = ку Uвх ;
U = кп Uу ; (3-17)
ω = U / kФ – Rяц М/(кФ)2 .
Решая систему уравнений относительно скорости вращения ω, получим общее уравнение статической механической характеристики в замкнутой системе.
ω = кукпUзс/ кФ(1+кс) – Rяц М/(кФ)2(1+кс) , (3-18)
где кс = γкукп/кФ – общий коэффициент усиления системы.
Применение отрицательной обратной связи по скорости обеспечивает стабилизацию ее при изменении нагрузки.
Это легко показать, сравнивая перепады скорости Δω при одном и том же моменте нагрузки в разомкнутой и замкнутой системах:
Δωраз = RяцМ/(кФ)2
Δωзам = RяцМ/(кФ)2(1+кс) = Δωраз/(1+кс).
Так как кс > 0, то всегда Δωзам < Δωраз, т.е. жесткость получаемых характеристик в замкнутой системе ( рис.3-10,б характеристика 2) больше жесткости характеристик в разомкнутой системе (характеристика 3).
При стремлении кс к бесконечности характеристика замкнутой системы будет стремиться к абсолютно жесткой.
б) Замкнутая система П – Д с отрицательной обратной связью по напряжению.
Для организации обратной связи по напряжению или ЭДС можно использовать любой датчик напряжения. В данном случае датчиком ЭДС служит потенциометр (потенциометрический датчик) RU, с которого снимается сигнал обратной связи понапряжению Uос = αU, где α – коэффициент обратной связи.
Рисунок 11 – Характеристики в замкнутой системе П-Д с отрицательной обратной
связью по напряжению
Сигнал рассогласования UВХ определяется как UВХ = UЗ.С - αU (3.20)
И![]() спользуя
уравнение механической характеристики
и учитывая (3.17), получаем уравнение
механической характеристики в замкнутой
системе с жесткой отрицательной связью
по напряжению
спользуя
уравнение механической характеристики
и учитывая (3.17), получаем уравнение
механической характеристики в замкнутой
системе с жесткой отрицательной связью
по напряжению
ω = , (3.21)
где kc = ky kn α – общий коэффициент системы, а с = кФ.
Для оценки жесткости получаемых характеристик сопоставим перепады скорости в разомкнутой и замкнутой системах:
Δωраз= М(Rп + Rя)/с2 и Δωзам=М[Rя+Rп/(1 + кс)].
Так как kc > 0, то Rп/(1 +kc) < Rп и Δωзам < Δωраз, т.е.жесткость характеристик в замкнутой системе выше, чем в разомкнутой.
Из уравнения 3.21 видно, что при кс → ∞ Δω→ MRя/с2, т.е. перепад скорости в пределе равен перепаду скорости на естественной характеристике при питании от источника с нулевым сопротивлением.
в) Замкнутая система П-Д с положительной обратной связью по току якоря
Схема замкнутой системы с положительной обратной связью по току приведена на рис.3.23,а. В качестве датчика тока в системе использован шунт с сопротивлением Rш.
. Падение напряжения на шунте пропорционально току якорной обмотки. В результате сигнал обратной связи по току будет Uот = βI, где β – коэффициент обратной связи по оку, имеющий размерность Ом. Сигнал на входе усилителя определяется как Uвх = Uзс + β I. (3.22)
И![]() спользуя
уравнение механической характеристики
и 3.22, легко получить уравнение механической
характеристики в замкнутой системе
спользуя
уравнение механической характеристики
и 3.22, легко получить уравнение механической
характеристики в замкнутой системе
ω = (3.23)
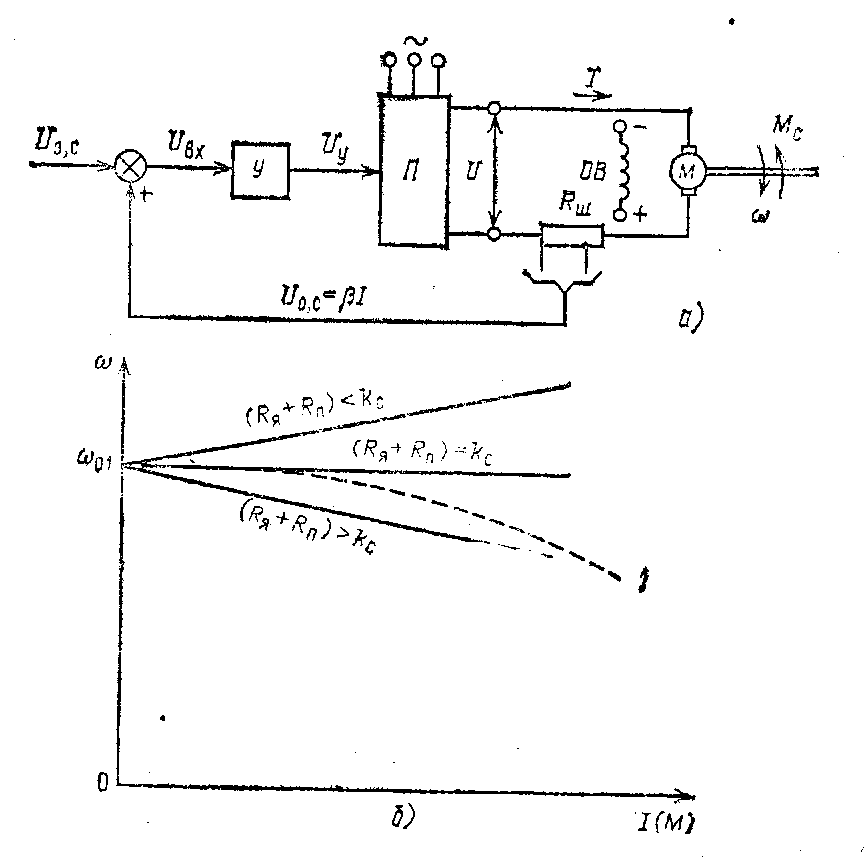
Рис. 3.11. Замкнутая система П—Д с положительной обратной связью
по току:
Сопоставляя суммарное сопротивление цепи якоря (Rя+Rп) с общим коэффициентом усиления kс, также имеющим размерность Ом, нетрудно заключить, что при Rя + Rп > kc характеристики системы имеют отрицательную жесткость, при Rя + Rп = kc – бесконечно большую жесткость, а при Rя+Rп < kс жесткость характеристики положительна.
г) Регулирование(ограничение) тока и момента в замкнутой системе П-Д с
помощью нелинейной отрицательной обратной связи по току
Структурная схема системы приведена на рис.3.24. Характеристика узла токовой
отсечки (УТО) U`ос=f (Uос) показана внутри изображающего его прямоугольника.
Значение опорного напряжения определяется заданным током, с которого должно начаться его регулирование. Этот ток получил название тока отсечки Iотс. Стопорный ток Iст определяется допустимым током двигателя.
В заключение отметим, что при реализации больших (предельных) коэффициентов усиления для получения качественных статических характеристик ухудшаются динамические показатели работы электропривода (колебательность, перерегулирование, время переходного процесса).

Рисунок3.12. - Замкнутая система П—Д с нелинейной отрицательной обратной
связью по току: а —схема; б —характеристики