

3.2.3 Зависимость конформационного потенциала от параметра электронно-конформационного взаимодействияа
Выбор интервала значений параметра а, характеризующего электронно-конформационное взаимодействие, а также изучение влияния этого параметра на форму потенциала (2.4) необходимы для успешного проведения компьютерных экспериментов.
При анализе влияния
параметра а
на свойства КП выбирался случай при
![]() ,
который соответствует условиям
глобального минимума закрытого состояния
канала. При этом значенииp
построены
конформационные потенциалы при различных
значениях параметра а
и при К=12
(рис. 3.8).
,
который соответствует условиям
глобального минимума закрытого состояния
канала. При этом значенииp
построены
конформационные потенциалы при различных
значениях параметра а
и при К=12
(рис. 3.8).
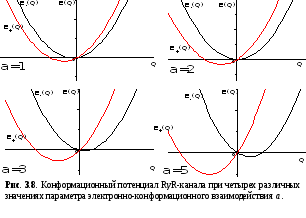
Как видно из графика, при а < 2 минимум правой ветви КП лежит левее точки пересечения ветвей КП, а это означает отсутствие локального минимума, отвечающего за открытое состояние RyR-канала.
Необходимо оценить
интервал значений параметра а,
при котором наблюдается стабильность
правого локального минимума потенциала.
Это условие выполняется в том случае,
когда минимум находится правее точки
пересечения ветвей потенциала. Данная
точка имеет координаты (0;0). Правый
минимум имеет координаты (![]() ;
; ),
вследствие чего должно выполняться
неравенство:
),
вследствие чего должно выполняться
неравенство:![]() >0.
>0.
Отсюда следует, что при минимальном значении параметра р=-1 безразмерный параметр а должен принимать значение больше 2. При проведении численных экспериментов, приведенных в данной работе, параметр а принимался равным 5.
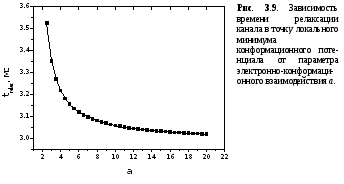
Как видно из рисунка 3.8, расстояние между минимумами КП увеличивается с ростом а, вследствие этого уменьшается время релаксации канала из одного локального минимума КП в другой (trelax) (рис. 3.9).
3.3 Стохастическая динамика RyR-канала. Быстрые переходы
При проведении численных экспериментов с достаточно большой длительностью, исследуя стохастическую динамику RyR-канала, можно пренебречь медленной конформационной динамикой. Быстрые электронные и туннельные переходы можно описать в рамках традиционной марковской схемы, имеющей ряд преимуществ. Во-первых, марковские схемы обладают достаточной простотой математического аппарата; во-вторых, алгоритмы численной реализации являются быстрыми, и с помощью них можно оценить средние времена пребывания канала в открытом, закрытом и инактивационном состояниях при различных значениях интенсивностей электронных и туннельных переходов.
В связи с тем, что в ЭК-модели электронные переходы связаны с взаимодействием ионов Са2+ с активными центрами RyR-канала, можно
В связи с тем, что в ЭК-модели электронные переходы связаны с взаимодействием ионов Са2+ с активными центрами RyR-канала, можно
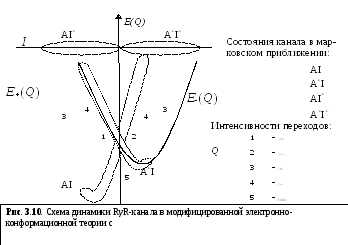
Как и на рисунке 2.7, введено обозначение A – активационный центр, I – инактивационный центр канала. Знаком * обозначена связанность ионов Са2+ с тем или иным центром, например, A*I означает то, что активационный центр канала заполнен ионами Са2+, а инактивационный – нет.
В терминах аппарата марковских цепей, были введены четыре основных состояния:
правая ветвь параболы
 :AI
– закрытое состояние;
:AI
– закрытое состояние; левая ветвь параболы
 :A*I
– открытое состояние;
:A*I
– открытое состояние; левая часть инактивационного уровня I: AI* – инактивационное состояние I1;
правая часть инактивационного уровня I: A*I* – инактивационное состояние I2.
Применяя схему, представленную ранее на рисунке 2.5, и пренебрегая на больших интервалах времени, переходные процессы:
 , (3.10)
, (3.10)
где
![]() ,
,![]() ,
,![]() ,
,![]() и
и![]() – интенсивности переходов. Как и на
рисунке 2.7,AI
соответствует закрытому (С),
A*I
– открытому состоянию канала (О).
AI*
и A*I*
– инактивационному состоянию (
– интенсивности переходов. Как и на
рисунке 2.7,AI
соответствует закрытому (С),
A*I
– открытому состоянию канала (О).
AI*
и A*I*
– инактивационному состоянию (![]() и
и![]() ,
соответственно,
,
соответственно,![]() ).
).
Изменение вероятностей пребывания в различных состояниях от времени описывается с помощью системы дифференциальных уравнений (уравнения Колмогорова):
 ,
(3.11)
,
(3.11)
где
![]() – вероятности пребывания в том или ином
состоянии.
– вероятности пребывания в том или ином
состоянии.
Зависимости вероятности пребывания канала в различных состояниях от времени являются решениями системы (3.11). Исследование решений системы (3.11) позволит оценить значения вероятностей электронных и туннельных переходов RyR-канала, что необходимо для проведения численных экспериментов.