

3. Задание на лабораторную работу
Даны две структурные схемы:
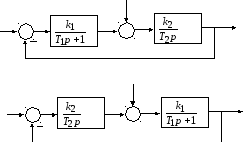
Рассчитать передаточные функции по управлению и возмущению каждой из схем.
По построенным характеристикам:
Определить, на что влияет положение звеньев в схеме.
Определить время переходного процесса.
Рассчитать перерегулирование.
Рассчитать коэффициент демпфирования.
Дать анализ устойчивости.
Определить ошибку системы.
Определить частоты среза.
Работа 3. Определение оптимальных настроечных параметров
ПИ- регулятора
1. Цель работы
целью работы является определение оптимальных настроечных параметров ПИ- регулятора по минимуму линейной интегральной оценки при ограничении на показатель колебательности М; определение влияния отклонений настроек регулятора от расчетных значений на качественные показатели системы.
2. Основные теоретические положения
Система автоматического управления с включенным регулятором может быть структурно представлена состоящей из двух динамических звеньев: объекта или неизменяемой части системы с передаточной функцией Wo(s) и регулятора Wp(s) (рис. 1).
Wp
(s)
Wo
(s)



 f
e
u
x
f
e
u
x
 _
_

Рис. 1
Необходимые качественные показатели системы обеспечиваются выбором типа регулятора и определением его настроечных параметров. При разработке систем управления обычно задаются: точность системы в установившемся режиме - допустимая статическая ошибка (или отсутствие статической ошибки) и критерии качества, определяющие переходный процесс в системе. В качестве такого критерия в данной работе используется линейная интегральная оценка. Параметры регулятора определяются из условия обеспечения минимума линейной интегральной оценки.
Типовые законы управления и выбор типа регулятора.
Типовые законы управления описываются следующими уравнениями.
Пропорциональный закон (П- регулятор).
Уравнение, описывающее пропорциональный закон управления,
u(t) = Kp e(t). (1)
Передаточная функция П- регулятора:
W(p) = Kp . (2)
П- регулятор имеет один настроечный параметр - коэффициент усиления Кр.
Пропорционально-интегральный закон (ПИ- регулятор).
ПИ- закон управления описывается уравнением
![]()
![]() .
(3)
.
(3)
Передаточная функция ПИ- регулятора
![]() .
(4)
.
(4)
ПИ- регулятор имеет два настроечных параметра - коэффициент усиления Кр и постоянную времени интегрирования Ти (время изодрома).
3. Пропорционально-интегрально-дифференциальный закон (ПИД- регулятор). Уравнение идеального ПИД- регулятора:
![]() . (5)
. (5)
Передаточная
функция идеального ПИД- регулятора![]()
![]() . (6)
. (6)
Точная реализация операции дифференцирования невозможна, поэтому реальный ПИД- регулятор имеет передаточную функцию:
![]() . (7)
. (7)
Здесь Кр - коэффициент усиления,
Ти - постоянная времени интегрирования,
Тд - постоянная времени дифференцирования,
Т1 0,1Тд .
4. Пропорционально-дифференциальный закон (ПД- регулятор).
Уравнение идеального ПД- регулятора:
![]() (8)
(8)
Передаточная функция идеального ПД- регулятора:
![]() (9)
(9)
Из-за невозможности выполнить операцию точного дифференцирования передаточная функция ПД- регулятора может быть реализована в виде:
![]() ,
(10)
,
(10)
где
![]() .
.
Чтобы исключить статическую ошибку, нужно включить в систему регулятор, обладающий интегральными свойствами, т.е. ПИ- или ПИД-регулятор.
Определение настроечных параметров регулятора из условия минимума линейной интегральной оценки.
 Линейная
интегральная оценка определяется
выражением:
Линейная
интегральная оценка определяется
выражением:
![]()
![]() ,
(11)
,
(11)
где есв(t)
- свободная (динамическая) составляющая
ошибки переходного процесса. Если
система устойчива, то
![]() ,
интегралJ1
стремится к конечному значению, равному
площади, заключенной между хуст
и x(t),
где x(t)
- переходная функция системы (рис. 2)
,
интегралJ1
стремится к конечному значению, равному
площади, заключенной между хуст
и x(t),
где x(t)
- переходная функция системы (рис. 2)
Рис. 2
На основании графика рис. 2 динамическая составляющая ошибки eсв(t) может быть определена так:
есв(t) = xуст1(t) - x(t). (12)
Если для есв(t) найдено изображение по Лапласу Есв(s), то
![]() .
(13)
.
(13)
Учитывая, что преобразование по Лапласу выражения (12) имеет вид,
![]() . (14)
. (14)
то
![]() .
(15)
.
(15)
Здесь Wз.с.(s) - передаточная функция замкнутой системы.
Следует отметить, что линейная интегральная оценка применима к монотонным или апериодическим процессам, поэтому при минимизации J1 по какому-либо параметру системы необходимо еще наложить ограничение на колебательность переходного процесса. Этими показателями могут быть: показатель колебательности М, запас устойчивости по фазе и амплитуде. Наиболее удобно использовать при синтезе систем показатель колебательности М, так как для хорошо демпфированных систем показатель колебательности выбирается в узких пределах М = 1,1 1,5.
От показателя колебательности системы зависит перерегулирование переходного процесса. В хорошо спроектированной системе перерегулирование, как правило, не должно превышать 20%, при этом показатель колебательности не должен превышать величины 1,2.
x
уст e(t)
Передаточная функция объекта в общем случае имеет вид:
![]() (16)
(16)
где: Q(s) = b0sm + b1sm-1 + …+ bm-1s +1 ,
S(s) = a0sn + a1sn-1 + … + an-1s + 1
Передаточная функция замкнутой системы с ПИ-регулятором:
![]() (17)
(17)
и
![]() .
.
Тогда в соответствии с выражением (15)
![]() .
(18)
.
(18)
Следовательно, для минимизации J1 нужно определить Кр и Ти таким образом, чтобы обеспечить минимум отношения 1 /Kp (или максимум Кр ) при ограничении М Мзад.
В общем схема определения оптимальных настроечных параметров ПИ-регулятора сводится к следующему. На основании заданного перерегулирования по диаграммам определяют допустимое значение показателя колебательности Мзад. Далее задаются рядом значений постоянной интегрирования Ти и для каждого Ти определяют значение коэффициента усиления регулятора Кр, при котором М = Мзад. После этого строится график зависимости Кр = f(Tи) при М = Мзад. Максимум полученной зависимости определяет оптимальные значения настоечных параметров ПИ-регулятора.