

Порядок выполнения работы
1. Установить значение параметра Gain 4 равным нулю (отсутствие в системе обратной связи по скорости) и наблюдать установление в системе автоколебаний.
Характер и параметры автоколебаний показаны на рис. 5


Рис. 5
|
Контур |
Амплитуда |
Частота |
|
Положения |
0,45 |
0,17 |
|
корости |
0,5 |
0,18 |
Установить значение параметра Gain 4 равным единице (максимальный коэффициент обратной связи по скорости) и наблюдать в системе скользящий режим движения к равновесию.


Рис.6
|
Контур |
Амплитуда |
Частота |
|
Положения |
– |
– |
|
Скорости |
0,04 |
2,86 |
2. Определить значение коэффициента передачи Gain 4, соответствующее оптимальному режиму (отсутствие на фазовой плоскости скользящего и колебательного режимов).
Найденное значение Gain 4 равно 0,4; время отработки заданного перемещения 12 с.


Рис. 7
4. Выполнить исследование влияния инерционности привода на параметры переходных процессов отработки заданного перемещения, изменяя постоянную времени в Transfer Fcn2 в 1.5 – 2 раза.
Значение Gain 4 равно 0,7; время отработки 16,1 с.
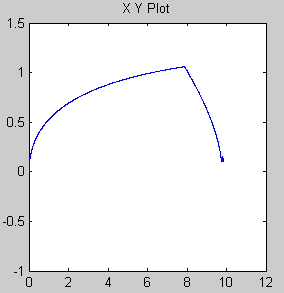

Рис. 8
Автоколебания:
|
Контур |
Амплитуда |
Частота |
|
Положения |
0,67 |
0,1 |
|
Скорости |
0,53 |
0,08 |
Скользящий режим:
|
Контур |
Амплитуда |
Частота |
|
Положения |
– |
– |
|
Скорости |
0,025 |
1,43 |
4. Блок контроля освоения дисциплины
Методические указания к выполнению курсовой работы
Методические указания приведены в отдельном издании: Теория управления: Методические указания к выполнению курсовой работы. - Спб.: СЗТУ, 2002
Методические указания к выполнению контрольной работы
Методические указания приведены в отдельном издании: Теория управления.: Рабочая программа, задания на контрольные работы. - Спб.: СЗТУ, 2003
4.3. Тренировочные тесты текущего
контроля (по разделам)
Тест № 1
Автоматическая система управления – это система, в которой
Рабочие операции выполняются без участи человека
Все рабочие и управляющие операции выполняют автоматические устройства без участия человека
Управляющие операции выполняются с частичным участием человека
Автоматизированная система управления – это система, в которой
Рабочие операции выполняются без участи человека
Все рабочие и управляющие операции выполняют автоматические устройства без участия человека
Управляющие операции выполняются с частичным участием человека
Алгоритм управления – это совокупность предписаний, определяющих необходимые воздействия на
Объект управления с целью осуществления его алгоритма функционирования
Устройство управления с целью осуществления его алгоритма функционирования
Исполнительное устройство с целью осуществления контроля его работоспособности