

Лабораторна робота 1 Визначення прискорення вільного падіння за допомогою математичного маятника
Прилади та матеріали: математичний маятник, секундомір, лінійка.
Теоретичні відомості
Математичним маятником називають матеріальну точку вагою Р, підвішену на невагому нерозтяжну нитку, яка рухається у вертикальній площині під дією сили тяжіння. Фізичне тіло вважають матеріальною точкою, якщо його розмірами можна знехтувати порівняно з довжиною підвісу.
У
Рис.
1.1
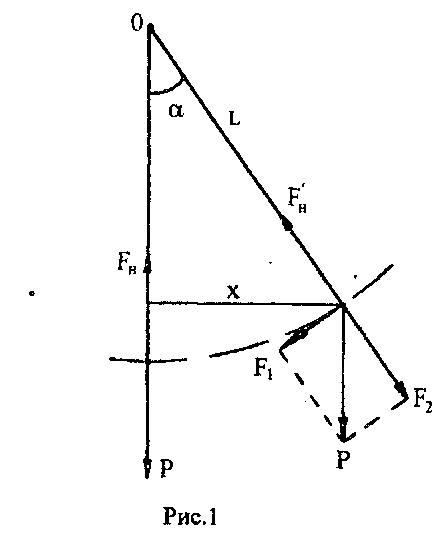
Виберемо декартову систему координат так, щоб вісь Y була спрямована вздовж підвісу вгору, а вісь Х – праворуч. Тоді рівняння руху матеріальної точки згідно з другим законом Ньютона матиме вигляд
mat = – P sin α
або
at = – g sin α, (1.1)
де аt – тангенціальне або дотичне прискорення; g – прискорення вільного падіння. Знак мінус означає, що складова сили F1 спрямована проти напрямку осі Х. Якщо кут досить малий (не перевищує 60), то sin α ≈ α і рівняння (1.1) матиме вигляд
at = – gα. (1.2)
Оскільки кут α = sinα = x/l, де l – довжина математичного маятника, тобто відстань від точки підвісу до центра тяжіння маятника; х – зміщення від положення рівноваги, то
at
=
![]() = –g
= –g
![]() .
(1.3)
.
(1.3)
Коливання маятника називають гармонічними, якщо зміщення х від положення рівноваги змінюється за законом
х = х0 sin(ωt+φ0), (1.4)
де х0 – амплітуда коливань; ωt + φ0 – фаза коливань, яка визначає частку періоду, що пройшов від початку коливань до моменту часу t; φ0 – значення фази в момент часу t = 0 (початкова фаза коливань); ω – кутова, або циклічна, частота, яку обчислюють за співвідношенням
ω
=
![]() ,
(1.5)
,
(1.5)
де Т – період коливань.
Звідси, двічі продиференціювавши рівняння (1.4) за часом і порівнявши з виразом (1.4), одержимо
![]() = –ω2
x0
sin(ωt
+ φ0)
= – ω2
x. (1.6)
= –ω2
x0
sin(ωt
+ φ0)
= – ω2
x. (1.6)
Порівнюючи співвідношення (1.3) та (1.6), одержимо, що за малих кутів
ω2
=
![]() .
.
Враховуючи співвідношення (1.5),
Т
= 2π![]() . (1.7)
. (1.7)
Із формули (1.7) випливає, що період коливання математичного маятника не залежить від амплітуди коливань (початкового кута відхилення α1, якщо α < 60) і маси маятника, а визначений відношенням його довжини до прискорення вільного падіння.
Формула (1.7) правдива тільки щодо незгасаючих коливань. Оскільки в нашому випадку згасання незначне, вважатимемо, що дана формула слушна й у разі слабозгасаючих коливань.
Таким чином, вимірявши період коливань математичного маятника певної довжини, можемо визначити величину прискорення вільного падіння.