

Лабораторна робота 2 Вивчення фізичного маятника
Прилади та матеріали: фізичний маятник, математичний маятник, секундомір, підставка з призмою, лінійка.
Теоретичні відомості
Р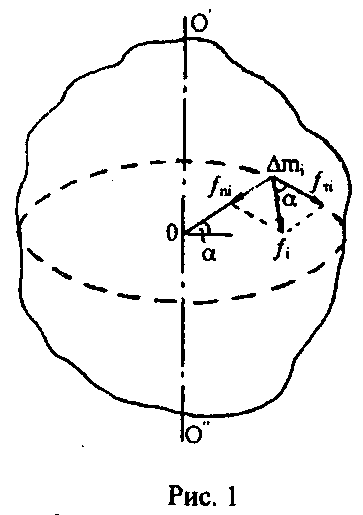 озглянемо
рух твердого тіла, закріпленого на
нерухомій осі О'О'', навколо якої воно
може вільно обертатись (рис.2.1). Нехай
на елементарну масу тіла Δmi
діє
стала величина
fi.
Тоді маса тіла Δmi
набуває сталого тангенціального
прискорення at,
яке визначає тангенціальна складова
ft.
Для останньої другий закон Ньютона має
вигляд
озглянемо
рух твердого тіла, закріпленого на
нерухомій осі О'О'', навколо якої воно
може вільно обертатись (рис.2.1). Нехай
на елементарну масу тіла Δmi
діє
стала величина
fi.
Тоді маса тіла Δmi
набуває сталого тангенціального
прискорення at,
яке визначає тангенціальна складова
ft.
Для останньої другий закон Ньютона має
вигляд
fti = Δmi ati . (2.1)
Як бачимо (рис.2.1),
fti = ficos α = Δmi ati . (2.2)
Нормальна складова сили fni забезпечує доцентрове прискорення і на кутове прискорення не впливає. Розглянемо кутове прискорення
β
Рис.
2.1
![]()
тоді рівняння (2.2) набуває вигляду
fi cos α = Δmi ri β.
Помноживши обидві частини цього виразу на ri, одержимо
fi ri cos α = Δmi ri2 β. (2.2а)
Добуток ricosα дорівнює довжині перпендикуляра, опущеного на напрям сили з точки 0.
Величину
Мі = fi ri cos α, (2.3)
яка чисельно дорівнює добутку величини сили fi на довжину перпендикуляра, опущеного на напрям сили з точки 0 (центра обертання), називають моментом сили відносно точки 0.
Величну
Ji = Δmi ri2, (2.4)
яка чисельно дорівнює добутку маси Δmi на квадрат відстані від точки зосередження цієї маси до центра обертання, називають моментом інерції маси m відносно точки 0.
Знайшовши суму виразу (2.2а) для всіх елементарних мас, на які розбито тіло, і враховуючи формули (2.3) і (2.4), остаточно одержимо
M = J β, (2.5)
де
![]()
![]() .
.
Рівняння (2.5) називають основним рівнянням динаміки обертального руху.
Якщо відомий момент інерції тіла відносно осі, яка проходить через центр ваги, то за теоремою Штейнера легко розрахувати момент інерції будь-якої осі, якщо вона паралельна першій. Момент інерції J відносно будь-якої осі обертання дорівнює сумі моменту інерції J0 відносно осі, яка проходить через центр ваги тіла й паралельна заданій, та добутку маси тіла на квадрат відстані l між осями:
![]() .
(2.6)
.
(2.6)
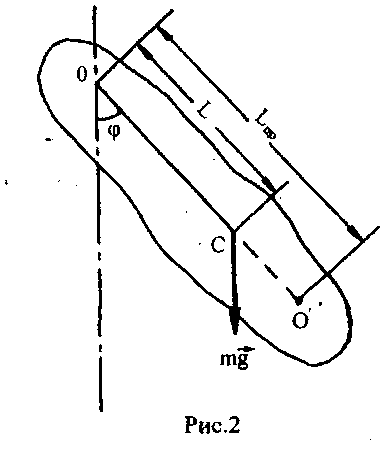
Фізичним маятником називають тіло, яке може виконувати коливання навколо горизон-тальної осі, що проходить через точку, незбіжну з його центром ваги (рис.2.2). У положенні рівноваги центр ваги С маятника знаходиться під точкою його підвісу О на одній із ним вертикалі. У результаті відхилення маятника на кут φ від положення рівноваги виникає обертальний момент, який намагається повернути маятник у положення рівноваги.
![]() ,
(2.7)
,
(2.7)
д
Рис.
2.2
Із формул (2.5) та (2.7) маємо
![]() ,
(2.8)
,
(2.8)
де J – момент інерції маятника відносно осі, яка проходить через точку підвісу; β – кутове прискорення (β = φ'').
Для
малих кутів sinφ![]() φ.
φ.
Рівняння (2.8) може бути подане у вигляді диференціального рівняння другого порядку:
![]() ,
(2.9)
,
(2.9)
де ![]() .
(2.10)
.
(2.10)
Із формул (2.9) і (2.10) випливає, що за малих кутів φ фізичний маятник виконує гармонічні коливання, частота яких залежить від маси маятника m, моменту інерції J відносно осі обертання і відстані між центром ваги маятника С та віссю обертання l. Величину
![]() (2.11)
(2.11)
(де ν – частота коливань; Т – період коливань) називають кутовою або циклічною частотою. Замінивши значення ω у формулі (2.10), маємо вираз для періоду коливань фізичного маятника:
Т
= 2π![]() .
(2.12)
.
(2.12)
Порівнюючи вираз (2.12) із аналогічним для періоду коливань математичного маятника
Т
= 2π![]() ,
(2.13)
,
(2.13)
бачимо, що математичний маятник із довжиною
![]() (2.14)
(2.14)
матиме такий же період, що й даний фізичний маятник.
Величина lЗВ має назву зведеної довжини фізичного маятника. Виведений із положення рівноваги фізичний маятник буде виконувати коливання з таким же періодом, що й математичний маятник довжиною l.
Якщо до осі фізичного маятника підвісити математичний маятник довжиною, рівною зведеній довжині фізичного маятника, то відхилені на однаковий кут обидва маятники коливатимуться з однаковим періодом так, що кулька математичного маятника буде весь час знаходитися в одному й тому ж місці фізичного маятника. Цю точку (вона лежить на відстані lЗВ від осі обертання) називають центром коливання даного фізичного маятника (точка О', рис. 2.2).