

ves_sopromat
.pdf
 dz
dz 




 Р
Р Р
Р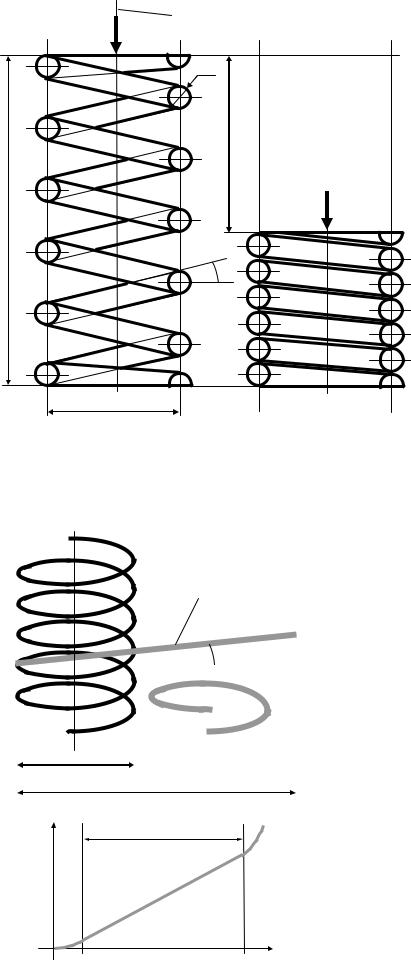
- 124 -
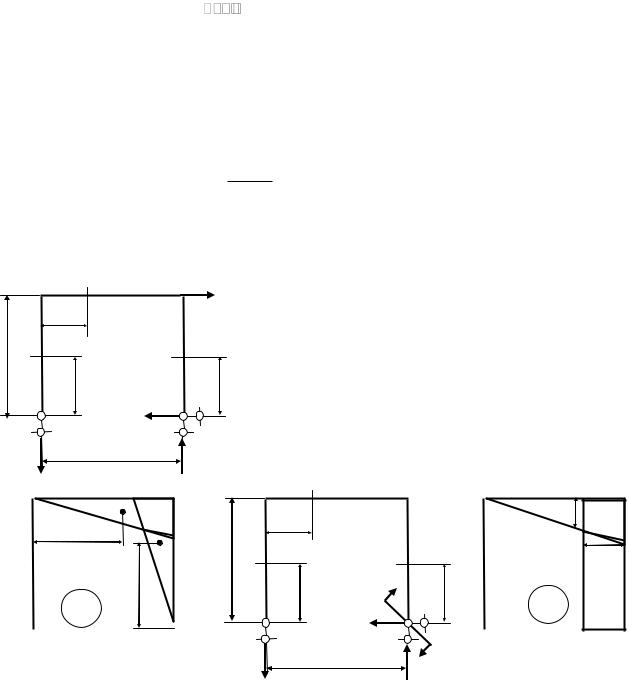
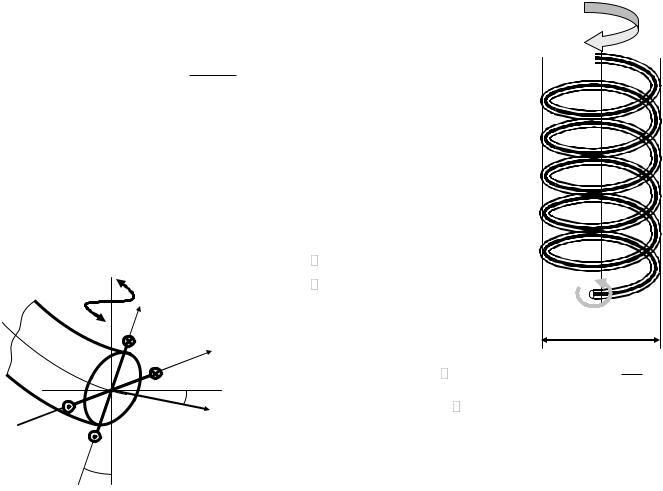
Рассмотрим основные характеристики цилиндрической пружины.
ось пружины
Р
d
|
|
|
D – диаметр пружины; |
|
|
d – диаметр прутка; |
|
|
|
|
|
|
|
|
n – количество витков; |
|
|
Р |
h – высота пружины; |
h |
|
λ – осадка пружины; |
|
|
|
||
|
|
|
α – угол подъема пружины; |
|
|
|
S – шаг пружины. |
|
|
|
D
Осадка пружины – это разница между ее высотой до и после нагружения. Осадка максимальна, когда витки касаются друг друга.
Шаг пружины – расстояние между точками, взятыми в одном и том же месте на разных витках.
|
|
|
|
развертка |
|
|
Рассмотрим пружину в развернутом |
|
|
|
|
одного |
|
|
виде. |
|
|
|
|
витка |
|
|
Длина одного витка пружины в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
развертке – это длина окружности: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
l D . |
S |
|
|
|
|
|
Длину всего прутка пружины в |
|
|
|
|
|
|
|
|
развертке можно определить по формуле: |
|
|
|
|
|
|
|
L Dn . |
|
|
|
|
|
|
|
Тогда, учитывая угол наклона витков |
|
|
|
|
|
|
|
к горизонтали, можно определить шаг |
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
пружины по формуле: |
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
S D tg . |
|
|
|
Р |
Линейная часть |
|
|
Зависимость осадки пружины от |
|
|
|
|
|
|
|
|
величины сжимающей силы Р можно |
|
|
|
|
|
|
|
представить в виде графика. |
|
|
|
|
|
|
|
Чем больше длина его линейной |
|
|
|
|
|
|
части, тем большее количество упругой |
|
|
|
|
|
|
энергии аккумулирует пружина. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 125 - |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
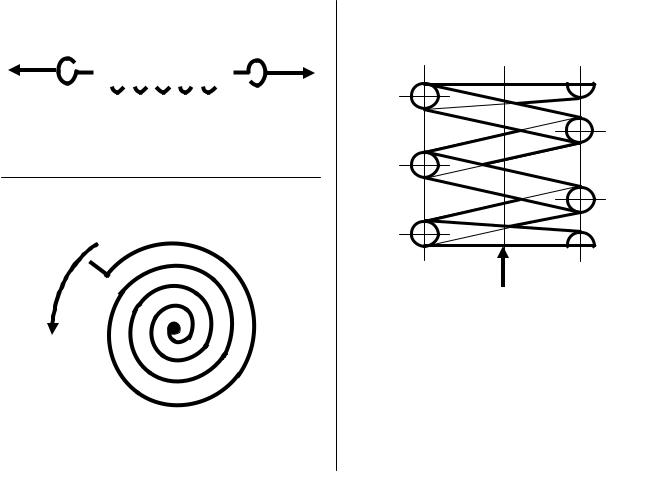
Мысленно рассечем пруток плоскостью, |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перпендикулярной |
|
образующей |
осевой |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пружины, и отбросим ее нижнюю часть. |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Действие |
|
|
отброшенной |
|
|
части |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уравновесим равнодействующей силой R, |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
которая при параллельном переносе в |
|||||||||||||||||
|
|
|
|
|
|
|
R = Р |
|
|
|
|
плоскость сечения прутка может быть |
|||||||||||||||||||||
|
|
M |
Q |
|
|
|
|
|
|
|
заменена силой Q и моментом М: |
|
|
|
|||||||||||||||||||
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
Q P ; |
M P |
D . |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
||
|
|
Разложим эти силовые факторы на |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Mz |
|
|
||||||||||||||||||
составляющие по осям у и z: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Qy |
Q Cos ; |
|
|
|
|
|
|
M кр |
|
M z |
M Cos ; |
|
|
|
|
|
|
|
|
|
Q |
Qy |
|
|
|
||||||
|
Q |
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
N Q Sin ; |
|
|
|
|
|
|
Mизг |
М х |
M Sin . |
|
|
|
|
|
|
|
|
|
N |
z |
|
|
|
||||||||
|
|
Ввиду |
того, |
|
что |
|
угол |
10 15 , |
|
|
|
|
|
|
|
|
|
Мx |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Sin ; |
Cos 1 . Тогда имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Q P ; N P |
; M |
z |
|
P D ; |
M |
x |
P D . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
y |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Определим напряжения, возникающие в сечении прутка. |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
Из-за малости угла можно считать, что |
|
Mкр |
|
Mизг и Qy |
N . Следовательно, |
||||||||||||||||||||||||||
при определении суммарных напряжений можно пренебречь нормальными |
|||||||||||||||||||||||||||||||||
напряжениями |
M |
x |
и |
N . |
Тогда в |
|
сечении прутка |
|
остаются |
только касательные |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
напряжения M |
и Q |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
z |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
Q |
|
|
|
|
|
М |
|
|
|
|
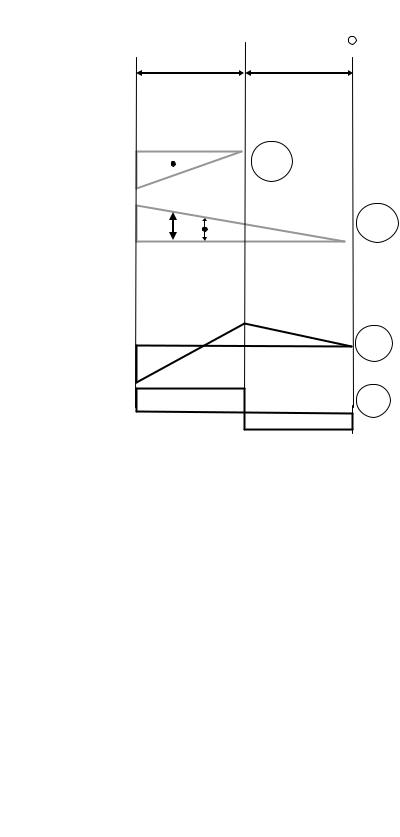
Поперечная сила Qу, создающая |
||||||||||||
Mz |
|
|
|
|
|
|
|
у |
|
|
|
z |
в |
|
сечении |
|
срез, |
равномерно |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
распределена |
|
по |
всей |
|
его |
|||||||||
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
поверхности. |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Максимальные |
касательные |
|||||||||||
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
напряжения возникают по наружной |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
образующей прутка: |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
max |
M |
Q . |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
y |
|
|
|
|
|
Ввиду |
того, |
что |
|
|
d |
D |
(т.к. |
|
D 5 10 ), |
|
|
касательные |
напряжения |
M |
|
Q , |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
поэтому последними можно пренебречь, тогда |
|
|
|
|
|
|
M z |
PD 16 |
8PD . |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
max |
|
M z |
W |
p |
2 d 3 |
d 3 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Итак, получено: |
max |
|
8PD |
. Таким образом, |
показано, что пружина растяжения- |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
d 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
сжатия в основном работает на кручение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
Определим перемещения пружины растяжения-сжатия, т.е. ее осадку . |
|
|
|||||||||||||||||||||||||||||
|
|
Для этого воспользуемся интегралом Мора и приложим единичный момент |
|||||||||||||||||||||||||||||||
M |
z1 |
1 D |
в точку искомого перемещения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 126 -
|
M |
z |
M |
z1 |
L |
P D D |
|
PD2 |
L |
|
P D3n 32 |
|
8PD3n |
|
||
|
|
|
dz |
|
dz |
|
|
|
|
|
|
|
|
. |
||
|
GI p |
|
2 2 GI p |
4GI p |
4G d |
4 |
Gd |
4 |
||||||||
z |
|
0 |
|
|
|
|
|
М |
||||||||
Итак, получено: 8PD3n .
Gd 4
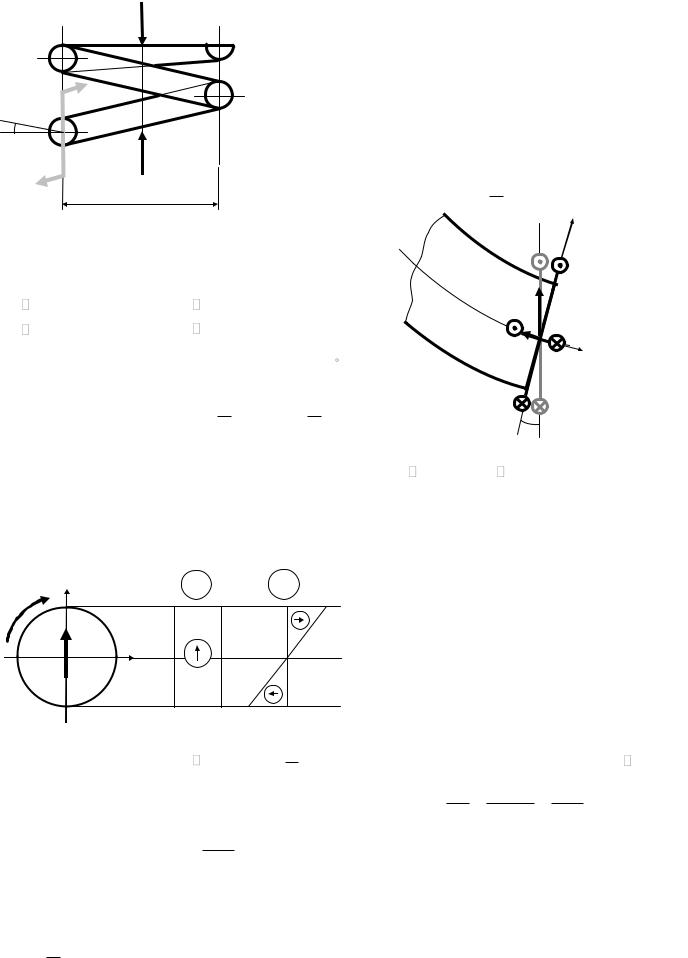
Определим напряжения в пружине кручения круглого поперечного сечения.
Рассмотрим поперечное сечение пружины. При приложении нагрузки, т.е. при ее закручивании, в нем возникает только момент М, который можно разложить на составляющие по осям у и z:
|
|
M кр |
M z |
M Sin ; |
|
|
|
|
|
|
|||||
|
вертик аль |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
y |
Mизг |
М y |
M Cos . |
|
|
|
|
|
М |
|||||
|
|
Из-за |
малости |
угла |
|
|
|
|
|
|
|||||
|
Mz |
|
|
|
|
|
D |
||||||||
|
имеем: Sin , |
Cos 1 |
|
|
и |
|
|
|
|||||||
|
х |
|
|
|
|
|
|
||||||||
|
Мy |
|
|
|
|
|
|
|
|
|
|
|
|
M 1 PD . |
|
|
|
можно считать, что M |
y |
M |
z |
, тогда M |
y |
||||||||
гориз онтал ь |
|
|
|
|
|
|
|
|
|
|
|
2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Следовательно: M |
M |
|
и последними можно |
||||||||||
|
z |
|
|||||||||||||
|
|
|
|
|
|
|
y |
|
|
z |
|
|
|
|
|
|
|
пренебречь, тогда максимальные напряжения, |
|||||||||||||
|
|
возникающие |
в |
поперечном |
сечении |
пружины |
|||||||||
|
|
кручения можно определить по формуле: |
|
||||||||||||
|
|
|
|
M y |
|
PD 32 |
|
16 PD |
. |
|
|
|
|
2 d 3 |
d 3 |
||||||
|
max |
|
M y |
W |
y |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Таким образом, показано, что пружина кручения в основном работает на изгиб. В пружине кручения для определения углового перемещения одного торца относительно другого также воспользуемся интегралом Мора и приложим
единичный изгибающий момент M y1 1 Cos 1 в точку искомого перемещения:
|
M y M y1 |
L PD 1 |
|
|
PDL |
|
PDL 64 |
32PDL |
||||||||||
|
|
|
dz |
|
|
dz |
|
|
|
|
|
|
|
|
. |
|||
EI |
y |
2 EI |
y |
2EI |
y |
2E d 4 |
Ed 4 |
|||||||||||
z |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Итак, получено: |
|
|
16 PD |
; |
|
32PDL |
. |
|||||||||||
|
|
|
|
|
max |
|
|
d 3 |
|
|
|
Ed 4 |
|
|
||||
§56. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Статически |
|
|
|
|
|
|
|
|
неопределимые системы. |
||||||||||
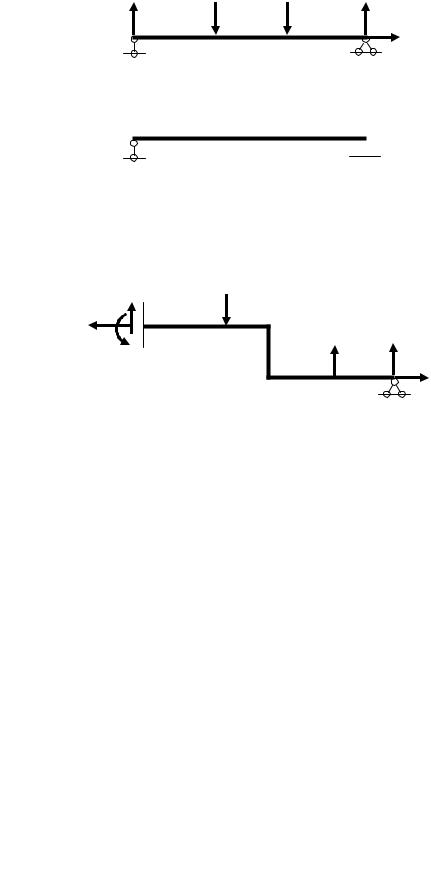
Статически неопределимой называется система, в которой число реакции связи больше числа основных уравнений равновесия ( уравнений статики). Для плоской системы – 3 уравнения равновесия. Для пространственной – 6 уравнений равновесия.
Если в системе число реакций связей равно числу основных уравнений равновесия, то она статически определима.
Если в системе число реакций связей меньше числа основных уравнений равновесия, то она представляет собой механизм.
-127 -
Встатически неопределимых системах связи, накладываемые сверх связей равновесия, называются дополнительными («лишними»).
Степень статической неопределимости системы равна числу дополнительных связей. Для нахождения «лишних» связей записывают дополнительные уравнения совместности деформаций. Их число равно степени статической неопределимости системы.
RA P1 P2 RB
|
|
|
|
B НB |
|
статически |
|
A |
|
|
|
|
определимая система. |
||
RA |
P1 |
RС |
P2 |
RB |
|
|
|
A |
|
С |
|
B |
НB |
|
1 раз статически |
|
|
|
неопределимая система. |
||||
|
|
|
|
||||
|
|
|
|
|
|
|
|
RА |
P1 |
RС |
P2 |
RB |
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
3 раза статически |
|
|
|
|
|
B НB |
||
НА |
|
С |
|
|
неопределимая система. |
||
МА |
|
|
|
|
|
|
|
RА |
P1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
НА |
|
|
P2 |
RB |
|
|
2 раза статически |
|
|
|
|
|
|
неопределимая система (рама). |
|
МА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
НB |
|
|
|
|
|
|
|
|
|
Перечисленные статически неопределимые системы статически неопределимы внешним образом. Статическая неопределимость может быть задана не только дополнительными связями, но и условием образования системы.
|
|
Пример: замкнутый контур – 3 раза статически |
|
|
|
||
|
|
неопределим внутренним образом. |
|
|
|
Для раскрытия его статической неопределимости |
|
М Q |
М |
необходимо разрезать его в любом месте. В точке |
|
|
|
разреза возникает 3 внутренних силовых фактора : |
|
|
|
нормальная сила N, поперечная сила Q, и изгибающий |
|
N |
N |
||
момент М. Форма контура не влияет на степень |
|||
|
Q |
статической неопределимости. |
|
|
|
Установка шарнира на оси стержня обращает в нуль изгибающий момент в этом сечении, следовательно, снижает степень статической неопределимости на единицу.
Если в шарнире сходятся n стержней, то он снижает степень статической неопределимости на n-1, т.к. заменяет собой столько же одиночных шарниров.

 l/2
l/2