

ves_sopromat
.pdf- 41 -
J x y2dF y2dxdy
F F
J y x2dF x2dxdy
F F
|
b |
|
h |
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
3 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
2 |
|
|
|
|
2 |
|
|
|
y |
3 |
|
|
2 |
|
|
|
|
b |
|
|
|
|
|
b |
2 |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
dx y dy x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
b |
|
h |
|
|
|
|
|
|
|
|
|
|
b |
|
|
3 |
|
h |
|
|
|
2 |
|
|
|
|
|
2 |
|
|
3 |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
b |
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
3 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
x |
3 |
2 |
|
|
|
|
h |
|
|
|
|
h |
2 |
|
||||||||||||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
dy x dx y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
h |
|
|
b |
|
|
|
|
|
|
|
|
|
|
h |
|
|
3 |
|
b |
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
3 |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
2 |
|
|
|
|
|
|
|
bh3 |
|
|
|
bh3 |
|
|
bh3 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
J x |
J x |
|
|
|
|
bh |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
12 |
|
|
|
4 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
b |
2 |
|
|
|
|
|
|
|
b3h |
|
|
|
b3h |
|
|
b3h |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
J y |
|
J y |
|
|
bh |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
12 |
|
|
|
4 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
h |
|
3 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|||||
|
2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
bh |
, |
|||||
|
|
|
|
3 |
|
|
|
|
|
|
12 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|||||
|
|
2 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
hb |
; |
||||||
|
|
|
3 |
|
|
|
|
|
12 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Итак, получено: |
|
|
J x |
|
bh3 |
|
, |
J y |
|
hb3 |
, |
|
|
J x |
|
bh3 |
, |
J y |
|
|
b3h |
. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
12 |
|
|
|
|
|
|
1 |
|
|
3 |
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Пример. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Круг. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
Рассмотрим круг диаметром D = 2R. Через центр тяжести |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
О проведем и оси х и у декартовой системы координат, |
а также |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
О |
|
|
|
x |
|
|
|
введем полярную систему координат (r, ). |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D 4 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
R |
|
|
|
|
2 |
|
r 4 |
|
R |
|
2 R |
4 |
|
|
R4 |
|
|
|
|
|
|
|
|
|
D4 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
2 |
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
4 |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
J |
|
dF |
r |
|
rdrd d |
r |
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,1D |
|
. |
|||||||||||||
|
|
|
|
|
4 |
|
|
|
|
4 |
|
|
|
|
2 |
|
|
2 |
|
|
|
|
32 |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
F |
|
|
F |
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
x y R |
|
D |
|
|
|
|
|
|
|
|
Jx J y , |
|
|
|
|
|
то: J x J y |
|
J |
|
R4 |
|
D4 |
|||||||||||||||||||||||||||
Т.к. для круга |
|
|
|
|
|
|
|
и |
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||||||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
4 |
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
64 |
|||||||
Итак, получено: |
|
|
J |
|
|
|
D4 |
J |
|
|
D4 |
|
J |
|
|
D4 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
32 |
, |
x |
64 |
, |
|
|
y |
64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Пример. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кольцо. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
Рассмотрим |
кольцо |
|
с |
внешним |
диаметром D и внутренним |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
диаметром d. Через центр тяжести кольца – точку О, проведем оси х |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
и у декартовой системы координат. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
4 |
|
d |
4 |
|
|
|
D4 d 4 |
D |
4 |
|
|
d |
4 |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
1 |
|
|
|
, |
|
|
|
|||||||||||||||||||||||
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
||||||||||||||||||||||||
О |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
32 |
|
|
32 |
|
|
32 |
|
|
|
|
|
|
32 |
|
|
|
D |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
- 42 - |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
J |
|
J |
|
|
J |
|
|
|
D4 d 4 . |
|
||||
|
|
|
|
|
x |
y |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
64 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Итак, получено: |
J |
|
|
|
D4 d 4 |
, |
|
J |
|
J |
|
|
|
D4 d 4 |
. |
||||
|
|
|
x |
y |
|
||||||||||||||
|
|
32 |
|
|
|
|
|
|
|
64 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
- 43 -
Пример. |
|
Треугольник. |
|
у |
|
h dу |
dF |
у
Оb(y)
b
Итак, получено: J x
|
Рассмотрим треугольник, левый нижний угол которого |
||||||||||||||||||||
|
поместим в начало координат. На расстоянии у от оси х выделим |
||||||||||||||||||||
|
элемент площади dF. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Из подобия двух треугольников следует: |
||||||||||||||||||||
|
|
b y |
|
h y |
, |
|
|
b y |
b h y |
; площадь элементарной |
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
b |
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
h |
||||
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
||
площадки dF b y dy |
|
|
h y dy . Тогда: |
||||||||||||||||||
|
h |
||||||||||||||||||||
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|||
|
|
|
|
|
|
|
|
3 |
h |
|
|
|
4 |
3 |
|
|
|||||
J x y2dF y2 |
b |
h y dy |
by |
|
|
|
by |
|
|
|
|
bh |
. |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
F |
0 |
|
h |
|
|
|
3 |
|
0 |
|
4h |
0 |
12 |
|
|
||||||
bh3 .
12
§17. Изменение моментов инерции при повороте осей.
у
у1
y1 y
B dF
E C
|
A |
D |
|
|
О
x1
х
x1
x
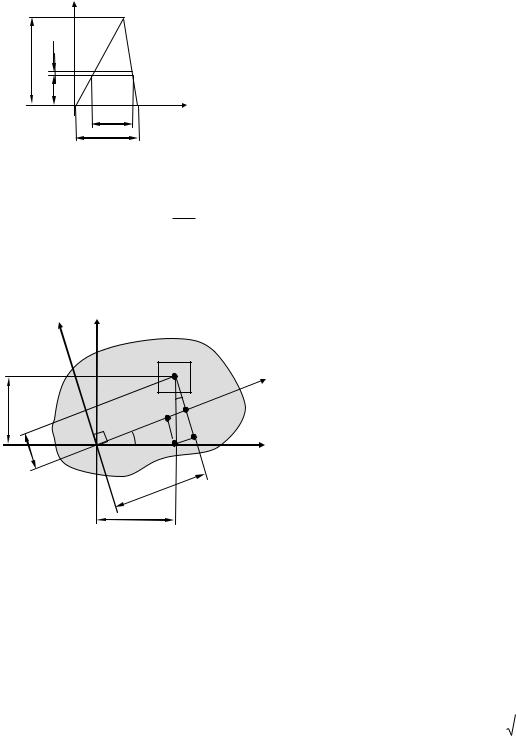
Рассмотрим произвольное сечение площадью F в декартовой системе координат
XOY.
Рассмотрим также новую систему координат X1OY1, полученную поворотом системы XOY против часовой стрелки на угол
.
Координаты элементарной площадки dF могут быть представлены через координаты прежней системы XOY следующим образом:
x1 OC OE AD ОАCos ABSin xCos ySin , y1 BC BD AE ABCos OASin yCos xSin .
Приложение.
Тригонометрические соотношения:
Sin2 Cos2 1, |
(1) |
|
|
|
|
|
|
|
|
|
|
|
|
Cos2 1 Sin2 , |
|
Sin2 1 Cos2 , (1б), |
1 |
|
|
|
|
|
|
|
|||
(1а), |
1 tg 2 , |
(1в); |
|||||||||||
|
Cos |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Сos2 Cos2 Sin2 , |
(2), |
|
Sin2 Cos2 Cos2 |
(2а), |
|||||||||
|
|
|
|
|
Cos2 Sin2 Cos2 (2б); |
||||||||
Sin2 2Sin Cos , |
(3), |
|
|
Sin Cos |
Sin2 |
. |
|||||||
|
|
||||||||||||
|
|
|
|
|
|
2 |
|
|
|||||
Подставим в (1а) выражение (2а): Cos2 1 Cos2 Cos2 , Cos2 |
1 Cos2 |
, (4); |
|||||||||||
|
|||||||||||||
|
|
|
|
|
|
2 |
|
|
|
||||
- 44 -
Подставим в (1б) выражение (2б): Sin2 1 Sin2 Cos2 , Sin2 |
1 Cos2 |
, (5). |
||||||||||||||||||||||||||||||||||||||||||||
2 |
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определим осевые и центробежный моменты инерции относительно осей х1 и |
||||||||||||||||||||||||||||||||||||||||||||||
у1: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J x1 |
|
y12dF yCos xSin 2 dF y2Cos2 dF 2xySin Cos dF x2Sin2 dF |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
F |
F |
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|||||||
|
|
|
|
JxCos2 Jxy Sin2 J y Sin2 Jx |
|
1 Cos2 |
|
J y |
1 Cos2 |
|
Jxy Sin2 |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Jx |
|
1 Cos2 |
|
J y |
1 Cos2 |
J |
|
|
|
Sin2 |
|
|
|
Jx |
|
|
|
Jx |
|
Cos2 |
|
J y |
|
|
|
J y |
|
Cos2 J |
|
|
Sin2 |
||||||||||||||
|
|
|
|
xy |
|
|
|
|
|
|
|
|
|
|
|
xy |
||||||||||||||||||||||||||||||
2 |
|
|
2 |
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
2 |
2 |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
J x |
J y |
|
J x J y |
|
|
|
Cos2 J |
|
Sin2 ; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xy |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
J y1 |
|
x12dF xCos ySin 2 dF x2Cos2 dF 2xySin Cos dF y2Sin2 dF |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
F |
F |
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
||||||||
|
|
|
|
J yCos2 Jxy Sin2 Jx Sin2 J y |
|
|
1 Cos2 |
Jx |
1 Cos2 |
Jxy Sin2 |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
J y |
|
1 Cos2 |
Jx |
1 Cos2 |
J |
|
|
|
Sin2 |
|
|
|
J y |
|
J y |
Cos2 |
Jx |
|
|
Jx |
Cos2 J |
|
|
Sin2 |
|||||||||||||||||||||
|
|
|
xy |
|
|
|
|
|
|
|
|
xy |
||||||||||||||||||||||||||||||||||
2 |
|
|
2 |
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
2 |
2 |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
J x |
J y |
|
J x J y |
|
|
|
Cos2 J |
|
Sin2 ; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xy |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
J x1 y1 x1 y1dF xCos ySin yCos xSin dF
FF
xyCos2 dF x2Sin Cos dF y2Sin Cos dF xySin2 dF
F F F F
J |
|
Cos2 J |
|
Sin2 |
J |
|
Sin2 |
J |
|
Sin2 J |
|
|
Cos2 Sin2 |
Sin2 |
J |
|
J |
|
|
|||||||||||||||||
xy |
y |
|
x |
|
|
xy |
xy |
|
x |
y |
||||||||||||||||||||||||||
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
J |
|
Cos2 |
J x |
J y |
Sin2 . |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
xy |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Итак, получено: |
|
|
|
|
Jx |
|
J x |
J y |
|
Jx J y |
Cos2 Jxy Sin2 , |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J y |
|
|
J x J y |
|
Jx |
J y |
Cos2 |
Jxy Sin2 , |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Jx y |
|
J x |
J y |
Sin2 JxyCos2 . |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Полученные формулы справедливы для любых центральных осей, а также при повороте любой системы прямоугольных осей на угол .
- 45 -
Учитывая, что полярный момент инерции J Jx J y , для системы координат X1OY1
получаем: J Jx1 |
J y1 , т.к. оси х1 и у1 взаимно-перпендикулярны. |
|||
При повороте системы координат на угол = 90 получаем: |
||||
|
Jx J y , |
J y Jx , |
Jx y Jxy . |
|
|
1 |
1 |
1 |
1 |

- 46 -
§18. Главные моменты инерции и главные оси инерции.
y
v
|
|
|
|
|
u |
|
|
0 |
|
|
x |
Итак, |
J |
x1 y1 |
J |
uv |
0 , |
О |
|
|
|
Наибольший |
практический |
интерес |
представляют |
главные |
центральные оси, |
относительно |
которых |
центробежный |
момент |
инерции равен нулю. Если оси u и |
v являются главными |
|||
центральными осями инерции, то относительно них Juv 0 .
или: |
J x y |
|
J x J y |
Sin2 0 J xyCos2 0 0 . |
||
2 |
||||||
|
1 |
1 |
|
|
||
|
|
|
|
|||
Разделив это выражение на Cos2 0 , получим: |
|
|
||||||||
|
J x J y |
tg 2 0 J xy , |
|
tg 2 0 |
|
2J xy |
|
(6), |
или : |
2J xy J y J x tg2 0 , (6а). |
|
J y J x |
|||||||||
2 |
|
|
|
|
|
|
||||
Получаемые отсюда два значения угла 0 |
отличаются |
на 90 и определяют положение |
||||||||
главных осей. |
|
|
|
|
|
|
|
|
||
При = 0 получаем: |
|
Ju JxCos2 0 J y Sin2 0 Jxy Sin2 0 , |
||||||||
|
|
|
|
Jv |
Jx Sin2 0 |
J yCos2 0 Jxy Sin2 0 . |
||||
Сложим и вычтем эти выражения:
Ju Jv JxCos2 0 J y Sin2 0 Jxy Sin2 0 Jx Sin2 0 J yCos2 0 Jxy Sin2 0Jx Cos2 0 Sin2 0 J y Sin2 0 Cos2 0 Jx J y .
Итак, получено: |
|
|
|
|
|
Ju Jv |
Jx J y , |
|
|
|
|
|
|
|
|
|
|
|
|
|
(7). |
|||||||||||
Ju Jv JxCos2 0 |
J y Sin2 0 JxySin2 0 Jx Sin2 0 J yCos2 0 Jxy Sin2 0 |
|
||||||||||||||||||||||||||||||
Jx Cos2 0 |
Sin2 0 J y Cos2 0 |
Sin2 0 2Jxy Sin2 0 |
Jx J y Cos2 0 |
2Jxy Sin2 0 |
||||||||||||||||||||||||||||
J x J y Cos2 0 J у J х tg 2 0 Sin2 0 J x |
J y Cos2 0 |
tg 2 0 Sin2 0 |
||||||||||||||||||||||||||||||
J |
|
|
|
|
|
Sin2 2 |
|
|
J |
|
|
|
Cos2 2 |
|
|
|
Sin2 2 |
|
|
J |
|
|
|
|
|
1 |
|
|
||||
|
J |
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||||||||||||
|
Cos2 |
|
|
0 |
|
|
|
|
0 |
|
|
0 |
|
|
|
|
||||||||||||||||
|
x |
|
y |
0 |
|
Cos2 0 |
|
|
|
x |
|
|
y |
|
|
|
|
Cos2 0 |
|
|
x |
|
|
y |
|
Cos2 0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Cos2 0 |
|
|
|
|
|
|
|
|
|
|||||||||||
Итак, получено: |
|
|
|
|
|
J |
|
|
J |
|
|
Jx J y |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
(8). |
|||||
|
|
|
|
|
u |
|
v |
Cos2 0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Решим систему уравнений (7) и (8) относительно Ju |
|
и Jv : |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Ju Jv
Ju Jv
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
J x J y |
|
Ju |
|
|
|
J x |
J y J x J y |
|
|
||||||||||||
|
2 |
|
Cos2 0 |
||||||||||||||||||
|
J x J y |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1 |
|
J |
|
|
|
J |
|
|
|
|
|
1 |
|
||||||
Cos2 |
|
|
J |
|
|
|
|
J |
|
|
J |
|
|
||||||||
|
0 |
|
v |
|
x |
y |
x |
y |
|
|
|
||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
Cos2 0 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Учитывая тригонометрическое соотношение (1в), получаем:
1 |
|
|
|
|
|
|
1 tg 2 2 0 , |
(9). |
|||
Cos2 0 |
|||||
|
|
|
|
||
|
|
|
|
|
|
|
- 47 - |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
|
|
|
2J xy |
|
|
|
|
|
4J xy2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставим (6) в (9): |
Cos2 |
0 |
|
1 |
|
|
J |
x |
J |
|
|
|
1 J |
x |
J |
y |
2 . |
||||
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|||||
Теперь определим моменты инерции относительно осей u и v :
Ju
Jv
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J x J y |
J x J y |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4J xy |
|
|
|
|
||||||||||||||||||||||||
1 J J |
|
J J 1 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
x |
|
y |
|
x |
|
y |
|
|
|
|
|
J x J y |
2 |
|
|
|
|
2 |
|
|
|
|
2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
J |
y |
|
|
|
|
J |
x |
J |
y |
2 |
|
|
|
2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
; |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xy |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J x J y |
|
|
|
|
J x J y |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
J |
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
1 |
|
J |
|
|
J |
|
1 |
|
4J xy |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
J x J y |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
2 |
x |
|
y |
|
x |
|
y |
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||
1 |
4J xy |
|
|
|
|
J x J y |
2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||
1 |
4J xy |
|
|
|
|
J x J y |
2 |
|
|
||
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
J |
y |
|
J |
x |
J |
y |
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
J 2 . |
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
xy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Итак, получено: |
J |
|
|
J x |
J y |
|
|||||
u |
|
|
2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
J x |
J y |
|
|||||
|
v |
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
J x J y |
|
|||||
|
max |
|
|||||||||
|
|
|
|
|
|
2 |
|
|
|
||
|
|
min |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
J |
x |
J |
y |
2 |
|
|
|
||||||
|
|
|
|
|
J 2 |
, |
|
||||||
|
|
|
|
|
|
||||||||
|
|
2 |
|
|
|
|
|
xy |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
J |
x |
J |
y |
|
2 |
|
|
|
|||||
|
|
|
|
|
|
J 2 |
, |
|
|||||
|
|
|
|
|
|
||||||||
|
|
2 |
|
|
|
|
|
xy |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
J |
x |
J |
y |
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
J 2 . |
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
2 |
|
|
|
|
|
|
xy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Верхние знаки в полученных формулах следует брать, если J x J y , нижние – наоборот, если J x J y . Т.к. оси u и v – главные, то Juv 0 , следовательно:
J x |
Ju Cos2 J v Sin2 |
|
Ju |
J v |
|
|
|
Ju |
J v |
|
Cos2 , |
||||
|
|
2 |
|
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
J y |
Ju Sin2 J v Cos2 |
Ju |
J v |
|
|
Ju |
J v |
Cos2 , |
|||||||
|
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
J |
|
|
Ju |
J v |
Sin2 . |
|
|
|
||||||
|
xу |
|
2 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
§19. Моменты сопротивления сечений.
Осевым моментом сопротивления сечения изгибу называется отношение осевого момента инерции к наибольшему расстоянию от центра тяжести сечения до наибо лее удаленной его точки по противоположной оси.
W |
J |
x |
, |
W |
J y |
. |
|
|
|
||||
x |
ymax |
y |
xmax |
|
||
|
|
|
||||
- 48 -
Осевой момент сопротивления сечения изгибу может принимать положительные или равные нулю значения и имеет размерность [ l3 ].
Полярным моментом сопротивления сечения кручению называется отношение полярного момента инерции сечения к его максимальному полярному радиусу.
W J .
max
Полярный момент сопротивления сечения кручению может принимать положительные или равные нулю значения и имеет размерность [ l3 ].
Рассмотрим моменты сопротивления некоторых сечений.
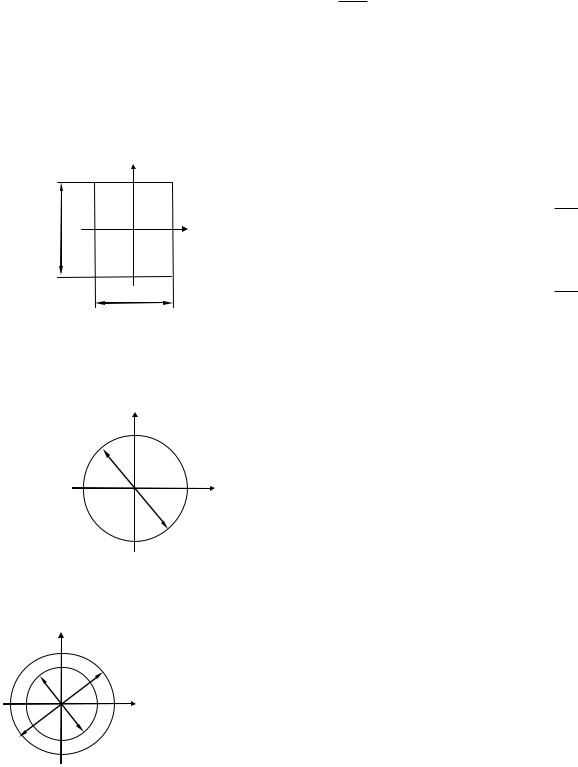
Прямоугольное сечение. y
|
|
W |
J x |
|
bh3 2 |
|
bh2 |
, |
|||||
|
|
|
|
|
|
|
|||||||
|
О |
x |
|
ymax |
|
|
12 h |
|
6 |
|
|
||
h |
|
|
|
|
|
|
|
||||||
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
Wy |
|
J y |
|
b3h 2 |
|
|
b2h |
|
, |
||
|
b |
||||||||||||
|
xmax |
|
12 b |
6 |
|
||||||||
|
|
|
|
|
|
|
|
|
|||||
Круглое сечение.
у
|
W W |
J |
x |
|
d 4 |
2 |
|
d 3 |
||||
|
|
|
|
|
|
, |
||||||
|
|
|
|
|
|
|
||||||
|
x |
y |
ymax |
|
64 d |
|
32 |
|||||
|
|
|
|
|
|
|||||||
О D |
x |
|
|
|
|
|
|
|
|
|
|
|
|
W |
J |
|
d 4 2 |
|
d 3 |
|
|||||
|
|
|
|
|
|
|
|
, |
|
|||
|
max |
|
32 d |
|
|
|||||||
|
|
|
|
|
16 |
|
||||||
Wx
Wy
Wx
W
bh62 ;
b2h .
6
Wy d 3 ;
32
d 3 .
16
Кольцевое сечение.
у |
|
|
|
|
|
|
|
|
D4 d 4 2 |
|
D4 d 4 |
|
|
|
D3 |
|
|
|
d 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
J x |
|
|
|
|
|
|
|
|
|
|
|
D3 |
|
|
d 4 |
|
|
|||||||||||||||
|
W W |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
, W W |
y |
|
|
1 |
|
|
|
|
|
|
; |
||||
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
4 |
|||||||||||||||||||||
|
x |
|
|
ymax |
|
|
64D |
|
|
32D |
|
|
|
|
32 |
|
|
|
D |
|
|
x |
|
32 |
|
|
D |
|
|
||||||||
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О d |
x |
|
|
|
|
|
|
|
D4 d 4 2 |
|
|
D4 d 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
D3 |
|
|
d 4 |
|
|
|
D3 |
|
d 4 |
|
|
|
||||||||||||
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
, |
W |
|
1 |
|
|
|
|
. |
|
|||||||||
|
|
|
|
max |
|
|
32D |
|
|
16D |
|
|
|
|
16 |
|
|
|
D |
4 |
|
|
|
|
|
|
D |
4 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
|||||||||||
§20. Кручение круглых профилей.
- 49 -
Кручением называется такой вид нагружения бруса, при котором в его поперечном сечении возникает только один внутренний силовой фактор, отличный от нуля, крутящий момент Mz или
Мкр.
Примером конструкции, работающей на кручение, является вал.
Mz |
При действии разнонаправленных крутящих моментов |
|
одинаковой величины в противоположных торцах вала, он |
||
|
||
Mz |
будет закручиваться, сечения вала будут поворачиваться |
|
|
относительно друг друга, а длина вала будет оставаться |
|
|
неизменной. |
|
|
Правило знаков. |
Положительным считается крутящий момент, направленный против часовой стрелки, если смотреть на сечение со стороны внешней нормали.
Правило знаков для крутящего момента условно (в отличие от правил зн аков для растяжения-сжатия), т.к. материал бруса одинаково ведет себя при кр учении в разных направлениях.
Экспериментально показано, что если закручивать вал до разрушения, то диаграмма кручения подобна диаграмме растяжения-сжатия.
Мz |
|
|
|
Основные характерные точки: |
|||
|
|
|
|
||||
Mв |
|
|
|
|
|
|
|
|
|
|
|
M пц - момент пропорциональности, |
|||
M |
Закон Гука |
до |
которого |
выполняется |
|||
закон Гука; |
|
|
|||||
Mпц |
для кручения: |
M Т - момент текучести; |
|
||||
|
G . |
M m a x - |
максимальный момент, |
||||
|
|
|
|
||||
|
|
|
|
выдерживаемый |
образцом до |
||
0 |
|
|
разрушения. |
|
|
||
|
|
|
|
|
|||
G – модуль сдвига |
(модуль |
упругости |
второго рода), справочная величина, |
||||
неизменная и постоянная для каждого материала. |
|
|
|
||||
Размерность: |
G |
Н |
Па . |
|
|
|
|
м2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
Экспериментально показано, что Е G. |
|
|
|
||||
Для стали: G = 0,8 104 МПа. |
|
|
|
|
|||
– угол сдвига (угловая деформация). |
Размерность: |
рад . |
|||||
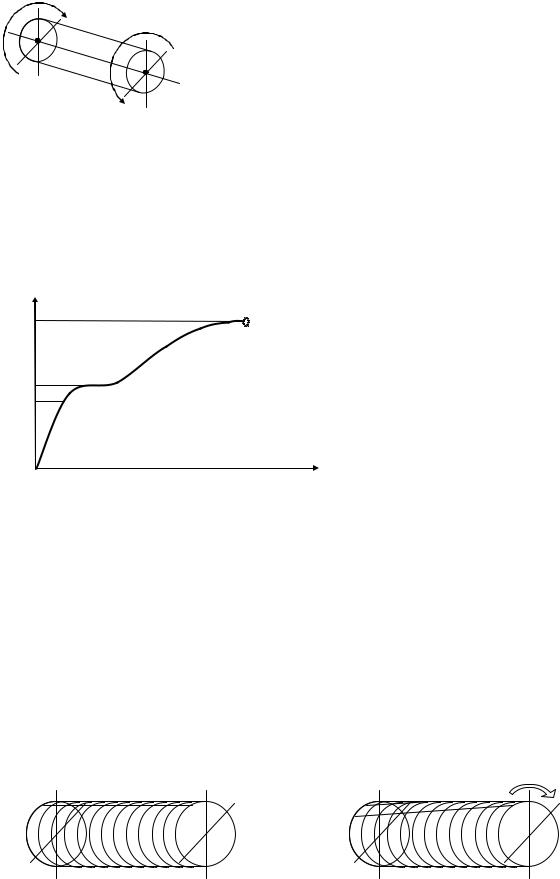
Рассмотрим вал с нанесенной на его поверхность прямоугольной сеткой.
Вал до деформации |
Вал после деформации |
Mz
|
- 50 - |
|
|
Mz |
|
|
|
|
Элемент сетки |
Элемент сетки |
|
до деформации |
после деформации |
|
|
- угол сдвига |
|
Опыт показывает, что расстояния между сечениями скручиваемого вала не изменяются. Продольные линии сетки приобретают винтовую форму, прямые углы искажаются, как в случае чистого сдвига.
Выделенный элементарный объѐм вала находится в условиях чистого сдвига. Радиусы остаются постоянными. Нижележащие слои (ближе к центру) испытывают меньшую деформацию, а максимальная деформация достигается по образующей поверхности вала.
Следовательно, выделенный элемент объема любого слоя материала вала находится в условиях чистого сдвига, т.е. кручение – есть чистый сдвиг.
Рассмотрим круглый брус поперечного сечения F, жестко закрепленный своим левым торцом. Направим ось z вдоль оси бруса от жесткой заделки слева направо. Рассмотрим на поверхности бруса образующую (горизонтальную линию) и приложим к правому свободному торцу бруса крутящий момент M z . Тогда образующая повернется на малый угол сдвига , а любой радиус поперечного сечения бруса на расстоянии z от жесткой заделки на малый угол (z) (угол закручивания).
(0)=0 |
|
|
|
|
|
(z) |
(z)+d |
max |
|
(l) |
||||
|
|
|||
A |
|
|
|
|
|
|
|
||
|
|
|
|
|
dF |
|
Mz |
ma |
|
M |
|
|
||
z |
О |
dF |
|
|
|
|
z |
dz |
|
|
|
dS |
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мысленно |
вырежем |
бесконечно |
малый |
|
|
dS |
|
участок бруса |
длиной |
dz и |
радиусом . |
В силу |
|
|
гипотезы о линейной зависимости деформаций от |
|||||
|
|
d |
|||||
|
|
приложенных |
сил, |
относительный |
угол |
||
|
|
|
|||||
dz |
закручивания равен: |
|
d ( z ) |
|
const, |
|
рад |
. |
|
|
|||||
|
dz |
|
|
м |
||
В силу закона Гука для кручения (сдвига):
G G tg G |
d |
, |
т.к. dS d , |
tg |
dS |
, |
|
|
|
1 , |
|
|
|
||||||||||
dz |
dz |
||||||||||
|
|
|
|
|
|
|
|
|
касательные напряжения лежат в плоскости круглого поперечного сечения бруса и перпендикулярны его радиусу , а крутящий момент определим как: