

2.7.5. Реальное интегрирующее звено
Динамика процесса в таком звене описывается следующим уравнением:
![]() ,
,
где k – коэффициент усиления.
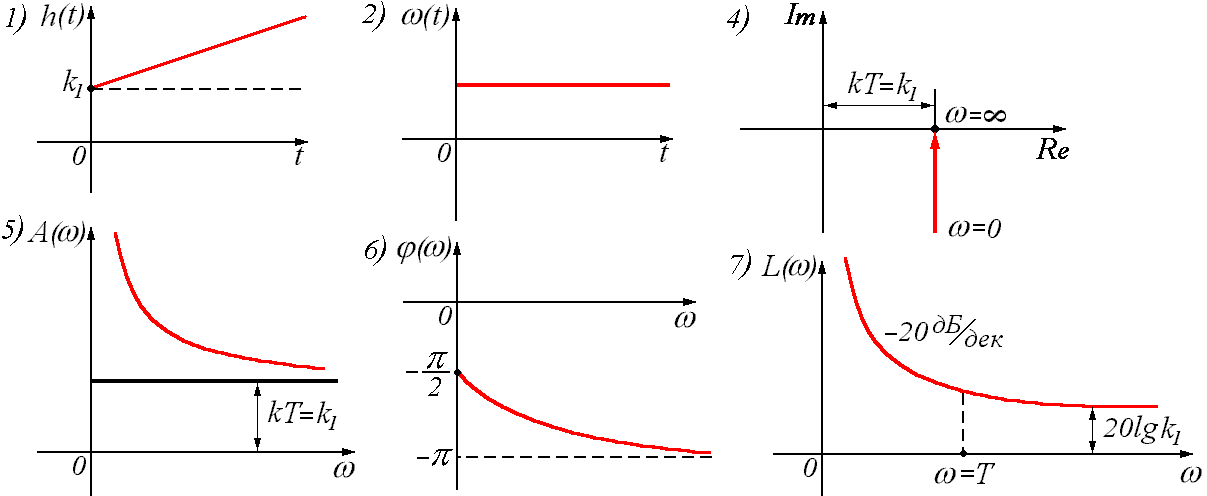
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика:
![]()
3. Передаточная функция реального интегрирующего звена:

Реальное интегрирующее звено представляет собой последовательное соединение идеального интегрирующего звена и апериодического.
4. АФХ:

5. АЧХ:
![]()
6. ФЧХ:
![]()
7. ЛАЧХ:
![]()
С

![]()
Примером может служить электродвигатель постоянного тока, в котором управляемая величина – поворот вала двигателя.
2.7.5. Изодромное интегрирующее звено
Динамика процесса описывается следующим уравнением:
![]() ,
,
здесь k и k1 – коэффициенты усиления.
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика:
![]()
3. Передаточная функция:

4. АФХ:
![]()
5. АЧХ:

6. ФЧХ:
![]()
7. ЛАЧХ:
![]()
С
![]()
Примером изодромного интегрирующего звена может служить гидравлический демпфер, к поршню которого присоединена пружина.
2.7.6. Идеальное дифференцирующее звено
Динамика процесса в таком звене описывается уравнением:
![]()
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика:

3. Передаточная функция:

4. АФХ:
![]()
совпадает с положительной частью мнимой оси.
5. АЧХ:
![]()
показывает: чем больше частота входного сигнала, тем больше амплитуда выходного сигнала. Эта особенность дифференцирующих звеньев вытекает непосредственно из основного уравнения: чем быстрее изменяется во времени сигнал x(t), тем больше его производная в правой части и выходной сигнал y(t).
6. ФЧХ:
Сдвиг фаз, создаваемый идеальным дифференцирующим звеном, на всех частотах одинаков и равен
![]()
7. ЛАЧХ звена:
![]()
-

![]() .
.
С
![]()
Примером дифференциального звена можно назвать тахогенератор постоянного тока.
2.7.7. Реальное дифференцирующее звено
Динамика дифференцирующего звена представлена уравнением
![]()
1. Переходная характеристика:

График меняется скачком.
2. Импульсная переходная характеристика:
![]()
3. Передаточная функция:

4. АФХ:
![]()
5. АЧХ:
![]()
6. ФЧХ:
![]()
7. ЛАЧХ:
![]()
С

![]()
Примером реального дифференцирующего звена является Rc – цепь.
З

2.7.8. Звено чистого запаздывания
Звеном чистого запаздывания называется такое звено, выходная величина которого полностью повторяет входную величину, но со сдвигом во времени на величину (время запаздывания).
Д

![]() ,
,
где - длительность запаздывания.
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика:
![]()
3. Передаточная функция звена:
![]()
4. АФХ:
![]()
представляет собой окружность с центром в начале координат и радиусом, равным единице.
5. АЧХ:
![]()
6. ФЧХ:
![]()
7

![]()
С
![]()
2.8. Структурные схемы сау
Для оценки точности, устойчивости и качества управления замкнутых систем необходимо знать их уравнения статики и динамики. Уравнение динамики замкнутой системы можно получить на основе совокупности уравнений отдельных элементов, образующих систему, путем последовательного исключения промежуточных переменных. Наиболее удобным для решения этой задачи объединения математических моделей элементов является метод структурных преобразований, согласно которому по структуре схемы с помощью нескольких простых правил находят ее общую (эквивалентную) передаточную функцию, а затем – соответствующее уравнение динамики.
Структурные схемы САУ это графическое изображение САУ, где динамика процессов представлена в операторной форме в виде передаточных функций.