

2.6.5. Вынужденные колебания в нелинейных системах
Рассмотрим НСАУ,
структурная схема которой приведена
на рис. 2.2, в режиме вынужденных
движений, когда на вход системы подается
сигнал
![]() .
Будем искать решение в виде
.
Будем искать решение в виде![]() .
.
Для гармонически
линеаризованной системы используем
связь изображения ошибки
![]() и входного воздействия
и входного воздействия![]() через передаточную функцию замкнутой
системы по ошибке
через передаточную функцию замкнутой
системы по ошибке![]() .
Сделав замену
.
Сделав замену![]() и подставив значения
и подставив значения![]() и
и![]() в показательной форме, получим
в показательной форме, получим
 .
.
После очевидных преобразований имеем
![]() . (2.67)
. (2.67)
Здесь
![]() – основание натурального логарифма.
– основание натурального логарифма.
Для определения
решений (2.67) строится в системе координат
линейной части системы зависимость,
соответствующая левой части (2.67)
(обозначим ее А)
и окружность
радиуса
![]() с центром в начале координат (рис. 2.19,а).
Точка пересечения 1 дает искомые значения
с центром в начале координат (рис. 2.19,а).
Точка пересечения 1 дает искомые значения
![]() и
и![]() .
Колебания будут устойчивы (т.е. в НСАУ
возникнут автоколебания), если при росте
.
Колебания будут устойчивы (т.е. в НСАУ
возникнут автоколебания), если при росте![]() возрастает значение
возрастает значение![]() .
.
В нелинейных
системах наличие автоколебаний зависит
от величины внешнего воздействия. Если
кривая А
начинается
не в начале координат, то режим в НСАУ
зависит от пороговой величины внешнего
воздействия
![]() (рис. 2.19,б).
(рис. 2.19,б).
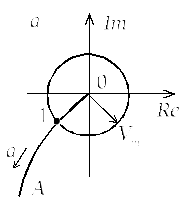
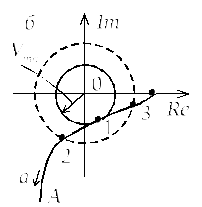
Рис. 2.19
Значение
![]() соответствует точке 1 касания окружности
линииА.
Эта граница раздела движений на колебания
(автоколебания), когда
соответствует точке 1 касания окружности
линииА.
Эта граница раздела движений на колебания
(автоколебания), когда
![]() и вынужденные колебания, когда
и вынужденные колебания, когда![]() .
Они могут быть устойчивыми (точка 2) и
неустойчивыми (точка 3).
.
Они могут быть устойчивыми (точка 2) и
неустойчивыми (точка 3).
2.7.Устойчивость процессов в нелинейных системах
2.7.1.Основные понятия и определения
Раздел, посвященный анализу устойчивости систем автоматического управления, является традиционным при изложении курса ТАУ. Объясняется это тем, что системы управления с обратными связями (кибернетические системы) склонны к неустойчивости. Устойчивостью любого явления в природе называют его способность достаточно длительно сохранять те формы своего существования, при утрате которых явление перестает существовать. Применительно к САУ этими явлениями являются протекающие в них процессы.
Основные определения и методы анализа устойчивости были даны в работах крупнейшего российского математика Ляпунова А.М.
Рассмотрим простейший случай нелинейной системы первого порядка рис. 2.2, которая описывается нелинейным дифференциальным уравнением
![]() , (2.68)
, (2.68)
где
![]() − входное воздействие,
− входное воздействие,![]() − исследуемая координата.
− исследуемая координата.
Пусть при
![]() задано начальное значение искомого
решения
задано начальное значение искомого
решения![]() и задано определенное входное воздействие
и задано определенное входное воздействие![]() при
при![]() .
В этом случае уравнение (2.68) имеет
определенное решение
.
В этом случае уравнение (2.68) имеет
определенное решение![]() ,
которое будем называтьневозмущенным
процессом (решением,
движением). Любое другое решение,
обусловленное другими начальными
условиями
,
которое будем называтьневозмущенным
процессом (решением,
движением). Любое другое решение,
обусловленное другими начальными
условиями
![]() ,
но при том же воздействии
,
но при том же воздействии![]() ,
будем называтьвозмущенным
и обозначать
,
будем называтьвозмущенным
и обозначать
![]() .
Задача ставится следующим образом: как
ведет себя возмущенное движение
.
Задача ставится следующим образом: как
ведет себя возмущенное движение![]() относительно невозмущенного
относительно невозмущенного![]() с течением времени, т.е. при
с течением времени, т.е. при![]() ,
или как ведет себя отклонение
,
или как ведет себя отклонение![]() при
при![]() .
Решение этой задачи и составляет предмет
математической теории устойчивости.
.
Решение этой задачи и составляет предмет
математической теории устойчивости.
Анализ поведения
решений исходного уравнения можно
заменить анализом тривиального решения
![]() уравнения
уравнения
![]() , (2.69)
, (2.69)
полученного из
(2.68) заменой
![]() .
.
Уравнение (2.68)
называется уравнением
возмущенного движения
в отклонениях. Это уравнение всегда
имеет решение
![]() .
.
Рассмотрим общий случай нелинейной системы произвольного порядка, для которой уравнения возмущенного движения в отклонениях имеют вид:
![]() ,
,![]() , (2.70)
, (2.70)
где при
![]() функции
функции![]() .
.
Дадим ряд понятий и определений устойчивости, следуя работам Ляпунова.
Невозмущенное
решение
![]() (положение равновесия) называетсяустойчивым,
если при заданном
(положение равновесия) называетсяустойчивым,
если при заданном
![]() ,
сколь бы оно мало ни было, существует
такое
,
сколь бы оно мало ни было, существует
такое![]() ,
в общем случае зависящее от
,
в общем случае зависящее от![]() ,
что при начальных отклонениях
,
что при начальных отклонениях
![]() ,
,
![]() будет выполняться условие
будет выполняться условие
![]() ,
,
![]() при
при![]() .
.
Невозмущенное
решение
![]() называетсянеустойчивым,
если хотя
бы для одного
называетсянеустойчивым,
если хотя
бы для одного
![]() условие
условие
![]() не выполняется.
не выполняется.
Если решение
![]() устойчиво и дополнительно при
устойчиво и дополнительно при![]()
![]() ,
,![]() ,
то невозмущенное решение
,
то невозмущенное решение![]() будем называтьасимптотически
устойчивым.
будем называтьасимптотически
устойчивым.
Если положение
равновесия асимптотически устойчиво
при любых начальных отклонениях
![]() ,
т.е.
,
т.е.![]() ,
то говорят обустойчивости
в целом. Если
известна величина
,
то говорят обустойчивости
в целом. Если
известна величина
![]() ,
то говорят обустойчивости
в большом
или об
устойчивости в области.
Если известно, что величина
,
то говорят обустойчивости
в большом
или об
устойчивости в области.
Если известно, что величина
![]() существует и может быть сколь угодно
малой, то говорят обустойчивости
в малом.
существует и может быть сколь угодно
малой, то говорят обустойчивости
в малом.
Наконец, если
положение равновесия асимптотически
устойчиво в целом при любых нелинейных
функциях
![]() из заданного класса, то говорят обабсолютной
устойчивости
нелинейной системы (2.70).
из заданного класса, то говорят обабсолютной
устойчивости
нелинейной системы (2.70).
Отметим, что в случае линейной системы положение равновесия устойчиво (асимптотически устойчиво) при любых отклонениях, т.е. устойчиво в целом. Кроме этого следует помнить, что устойчивость линейных систем не зависит от характера внешних воздействий, т.е. в этом плане устойчивость (неустойчивость) линейных систем является ее внутренним свойством.